一种适用于动态环境的自由空间轨迹规划方法及系统与流程
本发明涉及自动驾驶,具体而言,涉及一种适用于动态环境的自由空间轨迹规划方法及系统。
背景技术:
1、自由空间轨迹规划是无人驾驶核心算法模块中重要的一环,主要用于在非结构化环境中生成无人驾驶车辆的运动轨迹,从而引导着自车完成自动驾驶任务。在实际应用中常常用这种思想处理车辆自主泊入、泊出车位以及自主脱困等问题。
2、传统的自由空间轨迹规划处理流程通常包括路径生成、速度生成、路径速度融合三个基本环节。一方面,路径生成环节往往需要考虑安全约束,通常包括不允许路径与静态障碍物有碰撞,同时也不允许路径跨越地图边界,因此往往将静态障碍物和地图不可跨越边界统一考虑,在路径规划的过程中进行碰撞检查,并剔除碰撞检查不通过的路径。另一方面,在一次自由空间轨迹规划任务中,往往一次性生成连接任务起点和终点的轨迹,这意味着需要生成全局的路径,并沿着全局的路径生成全局的速度,并融合为全局的轨迹,这种方案仅能适用于静态的环境,因为一旦环境发生改变,通常需要重新规划轨迹,那么之前消耗算力规划出来的全局轨迹将会被舍弃,可见这种方法往往是低效的,难以适用于动态变化的环境。
技术实现思路
1、本发明提供一种适用于动态环境的自由空间轨迹规划方法及系统,用以克服现有技术中存在的至少一个技术问题。
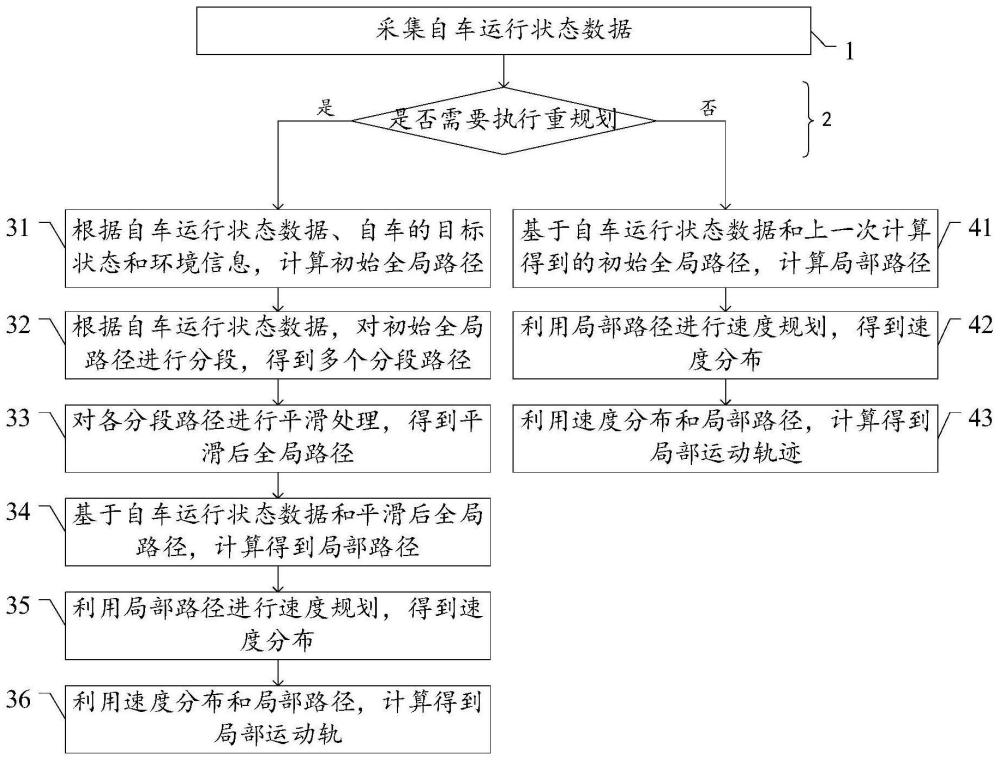
2、一方面,本发明实施例提供一种适用于动态环境的自由空间轨迹规划方法,包括:
3、采集自车运行状态数据;
4、根据所述自车运行状态数据判断是否需要执行重规划;
5、当需要执行重规划时:
6、根据所述自车运行状态数据、自车的目标状态和环境信息,计算初始全局路径;
7、根据所述自车运行状态数据,对所述初始全局路径进行分段,得到多个分段路径;
8、对各所述分段路径进行平滑处理,得到平滑后全局路径;
9、基于所述自车运行状态数据和所述平滑后全局路径,计算得到局部路径;
10、利用所述局部路径进行速度规划,得到速度分布;
11、利用所述速度分布和所述局部路径,计算得到局部运动轨迹;
12、当不需要执行重规划时:
13、基于所述自车运行状态数据和上一次计算得到的初始全局路径,计算局部路径;
14、利用所述局部路径进行速度规划,得到速度分布;
15、利用所述速度分布和所述局部路径,计算得到局部运动轨迹。
16、可选地,所述运行状态数据包括运行速度;
17、根据所述自车运行状态数据判断是否需要执行重规划,具体为:
18、当所述运行速度小于运行阈值时,判断自车当前位置第一距离内是否有障碍物,若有,表示需要执行重规划,若无,则表示不需要执行重规划。
19、可选地,所述自车的目标状态表示自车需要达到的状态;所述自车的目标状态包括自车在地图坐标系下的目标笛卡尔坐标和目标姿态角。
20、可选地,所述环境信息包括障碍物信息和地图不可跨越边界信息;
21、根据所述自车运行状态数据、自车的目标状态和环境信息,计算初始全局路径,具体为:
22、将所述自车运行状态数据、自车的目标状态、障碍物信息和地图不可跨越边界信息作为输入,基于路径平滑规划算法hybrid astar计算得到初始全局路径。
23、可选地,所述自车运行状态数据包括自车的当前姿态角;
24、根据所述自车运行状态数据,对所述初始全局路径进行分段,具体为:
25、根据所述自车的当前姿态角与笛卡尔坐标点的延伸方向,对当前路径进行分类;
26、根据当前路径分类,对所述初始全局路径进行分段。
27、可选地,根据所述自车的当前姿态角与笛卡尔坐标点的延伸方向,对当前路径进行分类,具体为:
28、当所述自车的当前姿态角与笛卡尔坐标点的延伸方向相同时,所述当前路径为前进路径;当所述自车的当前姿态角与笛卡尔坐标点的延伸方向相反时,所述当前路径为倒车路径。
29、可选地,所述自车运行状态数据包括自车当前位置;
30、基于所述自车运行状态数据和所述平滑后全局路径,计算得到局部路径,具体为:
31、在所述平滑后全局路径上,以所述自车当前位置为起点,截取第一长度的一段路径,作为所述局部路径。
32、可选地,利用所述速度分布和所述局部路径,计算得到局部运动轨迹,具体为:
33、利用所述速度分布和所述局部路径,计算得到自车在某一时间点的轨迹点信息;所述轨迹点信息包括时间、位移、速度、加速度、笛卡尔坐标、姿态角和曲率;
34、通过对不同时间点进行遍历,得到自车在不同时间点的多个轨迹点信息,所述多个轨迹点信息构成所述局部运动轨迹。
35、可选地,利用所述局部路径进行速度规划,得到速度分布,具体为:
36、利用所述局部路径构造位移-时间图;
37、在所述位移-时间图中搜索得到速度粗解;
38、对所述速度粗解进行平滑处理,得到所述速度分布。
39、另一方面,本发明还提供一种适用于动态环境的自由空间轨迹规划系统,包括:
40、采集模块,用于采集自车运行状态数据;
41、判断模块,用于根据所述自车运行状态数据判断是否需要执行重规划;
42、当需要执行重规划时,包括:
43、第一计算模块,用于根据所述自车运行状态数据、自车的目标状态和环境信息,计算初始全局路径;
44、分段模块,用于根据所述自车运行状态数据,对所述初始全局路径进行分段,得到多个分段路径;
45、平滑模块,用于对各所述分段路径进行平滑处理,得到平滑后全局路径;
46、第二计算模块,用于基于所述自车运行状态数据和所述平滑后全局路径,计算得到局部路径;
47、第一规划模块,用于利用所述局部路径进行速度规划,得到速度分布;
48、第三计算模块,用于利用所述速度分布和所述局部路径,计算得到局部运动轨迹;
49、当不需要执行重规划时,包括:
50、第四计算模块,用于基于所述自车运行状态数据和上一次计算得到的初始全局路径,计算局部路径;
51、第二规划模块,用于利用所述局部路径进行速度规划,得到速度分布;
52、第五计算模块,用于利用所述速度分布和所述局部路径,计算得到局部运动轨迹。
53、本发明实施例的创新点包括:
54、1、本实施例中,在路径规划时,基于障碍物是动态可变的、而地图不可跨越边界是静态不变的特征,将障碍物作为动态图层处理,地图不可跨越边界作为静态图层处理,如此,在环境动态变化导致全局路径不可行时,只需要更新动态图层的障碍物数据,而无需更新静态图层,有利于减小数据量,从而能够提高计算效率,是本发明实施例的创新点之一。
55、2、本实施例中,在动态变化的环境中,由于需要对动态障碍物进行实时的避让,因此,本发明根据障碍物的动态变化情况,在每个规划周期内对局部路径进行速度规划,并构建局部的运动轨迹,从而能够应对动态变化的环境,如此,可以避免开始直接对全局路径进行速度规划造成的资源浪费,有利于进一步提高计算效率,是本发明实施例的创新点之一。
- 还没有人留言评论。精彩留言会获得点赞!