一种抗干扰的欠驱动无人水面航行器控制方法及装置
本发明涉及无人水面航行器控制,特别是指一种抗干扰的欠驱动无人水面航行器控制方法及装置。
背景技术:
1、无人水面航行器具有较高的灵活性和适应性并能够承担高风险任务,因此,被广泛应用于海洋监测、救援、资源管理和环境保护等方面,为人类的海洋活动提供支持和保障。
2、无人水面航行器可以分为欠驱动和全驱动两种类型。全驱动usv具有较高的运动灵活性,但其机械结构较为复杂,能耗和成本较高。相比之下,欠驱动usv不需要大量的执行器和控制器,运行时间较长,并且成本较低,具有广泛的应用前景。无人水面航行器在执行任务时,其核心问题是usv的运动控制,但欠驱动usv系统的控制难度很大,同时,实际水面环境复杂多变,存在风、波浪或洋流引起的干扰等,如处理不当,会导致控制性能下降。
3、目前国内外对无人潜航器的控制开展了广泛研究,传统控制方法如pid,具有结构简单的特点,但其参数对性能的影响很大,并很难应用于复杂系统;模糊控制方法可用于非线性系统,但往往涉及较为复杂的系统建模和规则设计过程;适应控制方法适用于系统参数变化较大或不确定的情况,消耗较大的计算资源。另外,一些研究为降低系统复杂度对模型进行简化,但在实际应用中模型的简化会导致在不同外界条件下的控制鲁棒性较差。
4、在现有技术中,缺乏一种面向欠驱动无人水面航行器的鲁棒性强、计算效率高的控制方法。
技术实现思路
1、为了解决现有技术存在的欠驱动无人水面航行器在实际环境中的控制效果差的技术问题,本发明实施例提供了一种抗干扰的欠驱动无人水面航行器控制方法及装置。所述技术方案如下:
2、一方面,提供了一种抗干扰的欠驱动无人水面航行器控制方法,该方法由航行器控制设备实现,该方法包括:
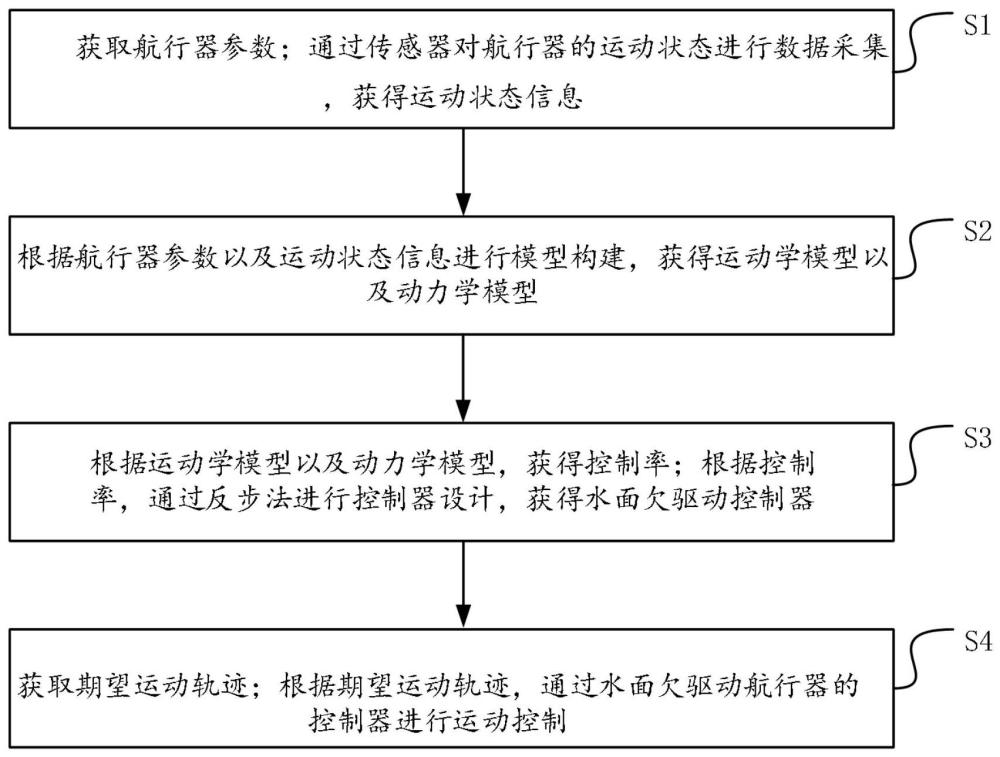
3、获取航行器参数;通过传感器对航行器的运动状态进行数据采集,获得运动状态信息;
4、根据所述航行器参数以及所述运动状态信息进行模型构建,获得运动学模型以及动力学模型;
5、根据所述运动学模型以及动力学模型,获得控制率;根据所述控制率,通过反步法进行控制器设计,获得水面欠驱动控制器;
6、获取期望运动轨迹;根据所述期望运动轨迹,通过水面欠驱动航行器的控制器进行运动控制。
7、可选地,所述控制率包括第一控制率,所述根据所述运动学模型以及动力学模型,获得控制率,包括:
8、根据所述运动学模型以及动力学模型确定第一位置误差以及第二位置误差;所述第一位置误差以及第二位置误差用于防止更新率出现奇点;
9、根据所述第一位置误差进行函数构建,获得第一李雅普诺夫函数;
10、根据所述第一位置误差以及第二位置误差进行函数构建,获得第二李雅普诺夫函数以及第三李雅普诺夫函数;
11、基于预设的模糊逻辑系统,根据所述第二位置误差,对推力的未知干扰进行估计,获得第一未知干扰项估计;
12、根据所述第一李雅普诺夫函数、所述第二李雅普诺夫函数、所述第三李雅普诺夫函数和第一未知干扰项估计,获得第一控制率。
13、其中,所述第一更新率的计算公式如下式(1):
14、tx=l1δd (1)
15、其中,为单位向量,δd为虚拟输入。
16、其中,所述第一未知干扰项估计的数学表达式如下式(2):
17、
18、其中,γ1为对角正定矩阵;b(x1)为模糊基函数向量;s2为第二位置误差;m为航行器刚体质量;pr(·)为映射函数。
19、可选地,所述控制率包括第二控制率,所述根据所述运动学模型以及动力学模型,获得控制率,包括:
20、根据所述运动学模型以及动力学模型确定第三跟踪误差;
21、根据所述第一位置误差、所述第二位置误差和所述第三跟踪误差进行函数构建,获得第四李雅普诺夫函数以及第五李雅普诺夫函数;
22、基于预设的模糊逻辑系统,根据所述第三跟踪误差,对扭矩的未知干扰进行估计,获得第二未知干扰项估计;
23、根据所述第四李雅普诺夫函数、第五李雅普诺夫函数和所述第二未知干扰项估计,获得第二更新率。
24、其中,所述第二更新率的计算公式如下式(3):
25、
26、其中,为的模糊逻辑估计,s3为第三跟踪误差;其中,为单位向量,ω=[0,-1;1,0]为常数矩阵,j为旋转矩阵,ηd为期望轨迹,β为常数向量。
27、其中,所述第二未知干扰项估计的数学表达式如下式(4):
28、
29、其中,γ2是对角正定矩阵;b(x2)为模糊基函数向量。
30、另一方面,提供了一种抗干扰的欠驱动无人水面航行器控制装置,该装置应用于抗干扰的欠驱动无人水面航行器控制方法,该装置包括:
31、数据获取模块,用于获取航行器参数;通过传感器对航行器的运动状态进行数据采集,获得运动状态信息;
32、模型构建模块,用于根据所述航行器参数以及所述运动状态信息进行模型构建,获得运动学模型以及动力学模型;
33、控制器设计模块,用于根据所述运动学模型以及动力学模型,获得控制率;根据所述控制率,通过反步法进行控制器设计,获得水面欠驱动控制器;
34、航行器运动模块,用于获取期望运动轨迹;根据所述期望运动轨迹,通过水面欠驱动航行器的控制器进行运动控制。
35、可选地,所述控制器设计模块,进一步用于:
36、根据所述运动学模型以及动力学模型确定第一位置误差以及第二位置误差;所述第一位置误差以及第二位置误差用于防止更新率出现奇点;
37、根据所述第一位置误差进行函数构建,获得第一李雅普诺夫函数;
38、根据所述第一位置误差以及第二位置误差进行函数构建,获得第二李雅普诺夫函数以及第三李雅普诺夫函数;
39、基于预设的模糊逻辑系统,根据所述第二位置误差,对推力的未知干扰进行估计,获得第一未知干扰项估计;
40、根据所述第一李雅普诺夫函数、所述第二李雅普诺夫函数、所述第三李雅普诺夫函数和第一未知干扰项估计,获得第一控制率。
41、其中,所述第一更新率的计算公式如下式(1):
42、tx=l1δd (1)
43、其中,为单位向量,δd为虚拟输入。
44、其中,所述第一未知干扰项估计的数学表达式如下式(2):
45、
46、其中,γ1为对角正定矩阵;b(x1)为模糊基函数向量;s2为第二位置误差;m为航行器刚体质量;pr(•)为映射函数。
47、可选地,所述控制器设计模块,进一步用于:
48、根据所述运动学模型以及动力学模型确定第三跟踪误差;
49、根据所述第一位置误差、所述第二位置误差和所述第三跟踪误差进行函数构建,获得第四李雅普诺夫函数以及第五李雅普诺夫函数;
50、基于预设的模糊逻辑系统,根据所述第三跟踪误差,对扭矩的未知干扰进行估计,获得第二未知干扰项估计;
51、根据所述第四李雅普诺夫函数、第五李雅普诺夫函数和所述第二未知干扰项估计,获得第二更新率。
52、其中,所述第二更新率的计算公式如下式(3):
53、
54、其中,为的模糊逻辑估计,s3为第三跟踪误差;其中,为单位向量,ω=[0,-1;1,0]为常数矩阵,j为旋转矩阵,ηd为期望轨迹,β为常数向量。
55、其中,所述第二未知干扰项估计的数学表达式如下式(4):
56、
57、其中,γ2是对角正定矩阵;b(x2)为模糊基函数向量。
58、另一方面,提供一种航行器控制设备,所述航行器控制设备包括:处理器;存储器,所述存储器上存储有计算机可读指令,所述计算机可读指令被所述处理器执行时,实现如上述抗干扰的欠驱动无人水面航行器控制方法中的任一项方法。
59、另一方面,提供了一种计算机可读存储介质,所述存储介质中存储有至少一条指令,所述至少一条指令由处理器加载并执行以实现上述抗干扰的欠驱动无人水面航行器控制方法中的任一项方法。
60、本发明实施例提供的技术方案带来的有益效果至少包括:
61、本发明提出一种抗干扰的欠驱动无人水面航行器控制方法,基于模糊逻辑对驱动输入进行虚拟估计,有效地降低了干扰带来的影响,适合处理更复杂的时变干扰。通过构建相关李雅普诺夫函数,迭代得到推力和扭矩的控制律,与传统反步法相比,所提的控制方案需更少的逆推迭代次数;本发明将速度误差逼近到一个小的常数向量范围内,而不是将其驱近于零,从而使系统误差最终一致有界。本发明是一种面向欠驱动无人水面航行器的鲁棒性强、计算效率高的控制方法。
- 还没有人留言评论。精彩留言会获得点赞!