一种应用于水下载人航行器的侧杆结构及水下载人航行器的制作方法
本发明涉及船舶控制,尤其涉及一种应用于水下载人航行器的侧杆结构及水下载人航行器。
背景技术:
1、水下载人航行器的主动侧杆技术,可以使艇员在操纵侧杆时有反馈控制力感,进而影响航行器的操纵性能。
2、目前大多数水下载人航行器的操纵控制系统的侧杆采用纯机械阻尼侧杆,结构简单,可靠性高。但无法适应不同操纵人员对阻尼特性的需求;另一方面,侧杆无法感受到航行器安全操纵界限的操纵限制。
技术实现思路
1、本发明提供一种应用于水下载人航行器的侧杆结构及水下载人航行器,用以解决现有技术中水下载人航行器的操纵控制系统无法适应不同操纵人员对阻尼特性的需求,而且无法感受到航行器安全操纵界限的操纵限制的问题。
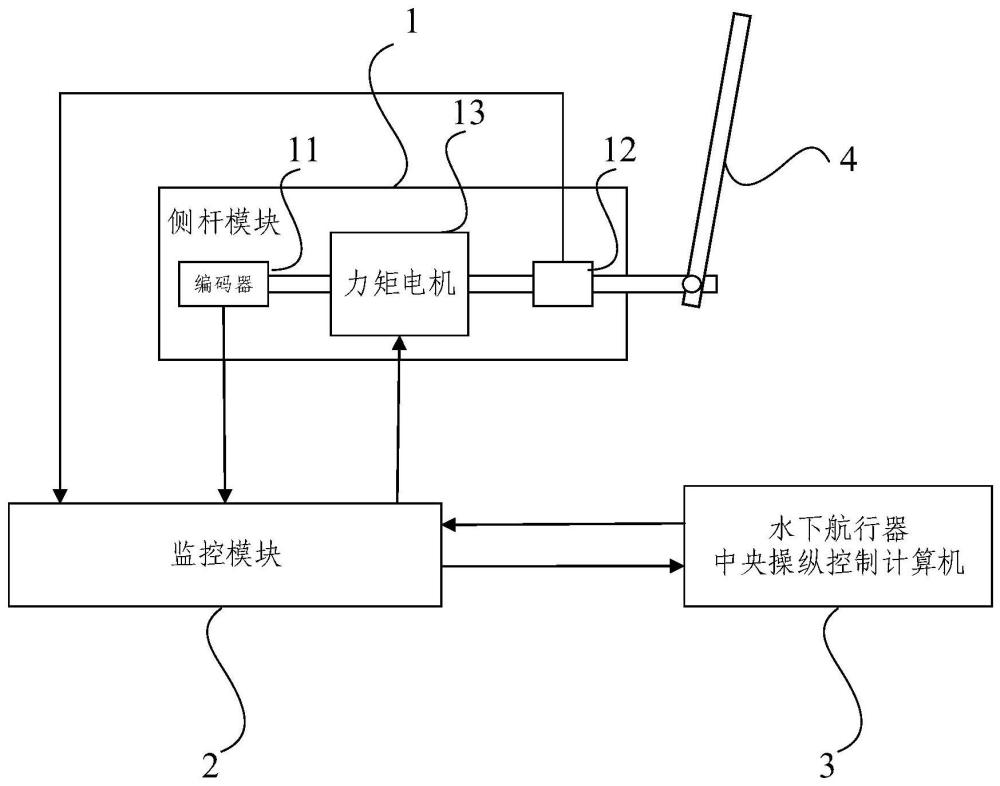
2、本发明提供一种应用于水下载人航行器的侧杆结构,包括:
3、主动侧杆、侧杆模块、监控模块和控制模块;
4、所述侧杆模块包括转轴、杆力传感器、力矩电机和编码器;
5、所述杆力传感器与所述主动侧杆连接,并通过所述监控模块与所述控制模块电连接,用于检测主动侧杆受所述力矩电机驱动外力,并将外力反馈信号通过所述监控模块发送至所述控制模块;
6、所述编码器与所述力矩电机电连接,并通过所述监控模块与所述控制模块电连接,所述编码器用于检测所述主动侧杆的侧杆位移,用以将所述侧杆位移通过所述监控模块发送至所述控制模块;
7、所述力矩电机通过所述转轴与所述主动侧杆传动连接,所述控制模块与所述力矩电机电连接,所述控制模块用于根据所述侧杆位移生成第一主动加载力矩,所述监控模块以通过所述第一主动加载力矩生成控制所述力矩电机控制所述主动侧杆的反向驱动力,并在水下载人航行器在当前所述侧杆位移下运行超过安全操纵界限时,所述控制模块在第一主动加载力矩的基础上生成第二主动加载力矩,所述监控模块以通过所述第二主动加载力矩控制所述力矩电机对所述反向驱动力进行调整。
8、根据本发明提供的一种应用于水下载人航行器的侧杆结构,所述主动侧杆为具有二自由度操纵杆;
9、所述侧杆模块还包括隔离结构,所述转轴设有两个,分别为深度指令转轴、航向指令转轴,所述主动侧杆与所述隔离结构连接;
10、所述深度指令转轴通过所述隔离结构与所述主动侧杆传动连接,用于反馈所述主动侧杆所传递的深度指令;
11、所述航向指令转轴通过所述隔离结构与所述主动侧杆传动连接,用于反馈所述主动侧杆所传递的航向指令。
12、根据本发明提供的一种应用于水下载人航行器的侧杆结构,所述杆力传感器设有两个;
13、其中一所述杆力传感器与所述深度指令转轴连接,并通过所述监控模块与所述控制模块电连接,用于检测主动侧杆沿深度方向受所述力矩电机驱动外力,并将沿深度方向的外力反馈信号通过所述监控模块发送至所述控制模块;
14、另一所述杆力传感器与所述航向指令转轴连接,并通过所述监控模块与所述控制模块电连接,用于检测主动侧杆沿航向方向受所述力矩电机驱动外力,并将沿航向方向的外力反馈信号通过所述监控模块发送至所述控制模块。
15、根据本发明提供的一种应用于水下载人航行器的侧杆结构,所述力矩电机设有两个;
16、其中一所述力矩电机通过所述深度指令转轴与所述主动侧杆传动连接;
17、另一所述力矩电机通过所述航向指令转轴与所述主动侧杆传动连接。
18、根据本发明提供的一种应用于水下载人航行器的侧杆结构,所述编码器设有两个;
19、其中一所述力矩电机与其中一所述编码器电连接,其中一所述编码器用于检测所述主动侧杆沿深度方向的侧杆位移,用以将沿深度方向的所述侧杆位移通过所述监控模块发送至所述控制模块;
20、另一所述力矩电机与另一所述编码器电连接,另一所述编码器用于检测所述主动侧杆沿航向方向的侧杆位移,用以将沿航向方向的所述侧杆位移通过所述监控模块发送至所述控制模块。
21、根据本发明提供的一种应用于水下载人航行器的侧杆结构,所述侧杆模块还包括:减速器;所述减速器与所述力矩电机传动连接。
22、根据本发明提供的一种应用于水下载人航行器的侧杆结构,所述侧杆模块还包括:壳体和轴承,所述轴承设置于所述壳体,所述转轴与所述轴承连接;所述主动侧杆包括杆体和手柄;所述手柄与所述杆体连接,所述杆体与所述杆力传感器连接,所述杆体通过所述转轴与力矩电机传动连接。
23、根据本发明提供的一种应用于水下载人航行器的侧杆结构,所述监控模块包括:
24、旋转变压器、电流传感器、电机驱动模块和监控控制器;
25、所述力矩电机的第一信号发送端通过所述旋转变压器与所述监控控制器电连接,所述力矩电机的第二信号发送端通过所述电流传感器与所述监控控制器电连接;
26、所述力矩电机的信号接收端通过所述电机驱动模块与所述监控控制器电连接,所述监控控制器与所述控制模块电连接。
27、根据本发明提供的一种应用于水下载人航行器的侧杆结构,所述监控模块还包括:
28、杆力信号调制电路、位移信号调制电路和电流信号调制电路;
29、所述杆力传感器通过所述杆力信号调制电路与所述监控控制器电连接,所述旋转变压器通过所述位移信号调制电路与所述监控控制器电连接,所述电流传感器通过所述电流信号调制电路与所述监控控制器电连接。
30、本发明还提供一种水下载人航行器,包括上述任一项所述的侧杆结构。
31、本发明提供的一种应用于水下载人航行器的侧杆结构,通过设置主动侧杆、侧杆模块、监控模块和控制模块;将杆力传感器与主动侧杆连接,并通过监控模块与控制模块电连接,用于检测主动侧杆受所述力矩电机驱动外力,并将外力反馈信号通过监控模块发送至控制模块;编码器与力矩电机电连接,并通过监控模块与控制模块电连接,编码器用于检测主动侧杆的侧杆位移,用以将侧杆位移通过监控模块发送至控制模块;力矩电机通过转轴与主动侧杆传动连接,控制模块与力矩电机电连接,控制模块用于根据侧杆位移生成第一主动加载力矩,监控模块以通过第一主动加载力矩控制力矩电机控制主动侧杆的反向驱动力,并在水下载人航行器在当前侧杆位移下运行超过安全操纵界限时,控制模块在第一主动加载力矩的基础上生成第二主动加载力矩,监控模块以通过第二主动加载力矩控制力矩电机对反向驱动力进行调整。
32、该应用于水下载人航行器的侧杆结构具有多重应用价值,包括:
33、(1)有助于提升航行操纵安全。主动侧杆技术将安全操纵界限,航行状态等信息进行融合,反馈为侧杆反向驱动力,杆力变化能够提示艇员是否接近或超越了安全操纵范围,再通过仪表显示功能将状态更完整的传达给艇员,保证艇员做出正确的操纵行为。
34、(2)提升艇员操纵体验和人机工效。侧杆的控制算法,可实现对机构摩擦力补偿,并自适应调节侧杆的相应刚度、阻尼参数,从而调整操纵力感特性,降低操纵负荷,提升操纵体验。
35、(3)提升潜操系统控制品质。主动操纵技术,自适应调节技术将使得下达的舵杆指令更为平稳、准确和快速,将有效避免指令舵角、指令航向角、指令深度、指令变化速率等参数抖动,从而提升控制品质。
36、(4)有助于减员增效。主动操作杆技术将水下载人航行器多方面航行态势信息融合到杆位移和杆力中,从而实现单人操艇,减员增效。
- 还没有人留言评论。精彩留言会获得点赞!