机器人的过道避障方法、装置、介质及设备与流程
本发明涉及机器人,尤其涉及机器人的过道避障方法、装置、介质及设备。
背景技术:
1、机器人在园区、写字楼、交通枢纽等场景中进行巡检工作时,经常会在狭窄的过道遇到对面相向而来的其他机器人。当机器人双方的最低避障宽度范围叠加大于过道宽度时,将会出现两个机器人互不相让、堵死不动的情况。
2、针对此类问题,现有技术采用设置较小的机器人避障距离来使得机器人能够顺利通过过道,这种方式会降低机器人的避障需求,在非机器人场景的避障场景中会因为避障距离不足而不能正常避障,智能化程度低。现有技术也采用导航定位的方式事先规划机器人的运行路径,来避免机器人同时对向经过过道,然而这种方式要求机器人具有较高的功能配置,实现成本高,适用性较低。
技术实现思路
1、本发明实施例提供了一种机器人的过道避障方法、装置、介质及设备,以解决现有机器人间的过道避障方式存在的智能化程度低、功能配置要求高且避障成本高的问题。
2、一种机器人的过道避障方法,所述方法包括:
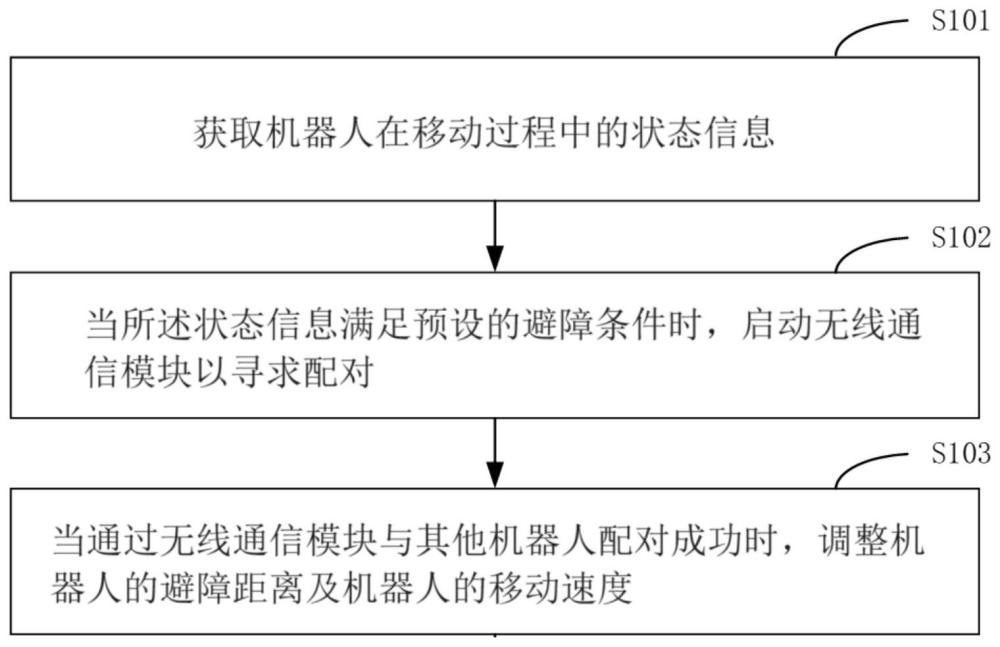
3、获取机器人在移动过程中的状态信息;
4、当所述状态信息满足预设的避障条件时,启动无线通信模块以寻求配对;
5、当通过无线通信模块与其他机器人配对成功时,调整机器人的避障距离及机器人的移动速度;
6、其中,调整后的避障距离小于调整前的避障距离,调整后的移动速度小于调整前的移动速度。
7、可选地,所述获取机器人在移动过程中的状态信息包括:
8、控制机器人在移动过程中按照预设频率向前方发射超声波信号以检测障碍物距离;
9、当所述障碍物距离小于预设的避障距离时,设置所述状态信息为避障冲突状态,否则当所述障碍物距离大于或等于预设的避障距离时,设置所述状态信息为非避障冲突状态。
10、可选地,所述当所述状态信息满足预设的避障条件时,启动无线通信模块以寻求配对包括:
11、当所述状态信息为机器人处于避障冲突状态时,获取避障冲突状态的持续时间;
12、当所述避障冲突状态的持续时间大于预设时间阈值时,启动无线通信模块以寻求配对。
13、可选地,在调整机器人的避障距离及机器人的移动速度之后,所述方法还包括:
14、以调整的时间节点为起点,若在第一预设时段内未检测到机器人处于避障冲突状态,则恢复避障距离和移动速度,以及关闭无线通信模块。
15、可选地,所述启动无线通信模块以寻求配对包括:
16、发出通信连接请求,同步接收来自其他无线通信模块的通信连接请求;
17、若在无线通信模块启动后的第二预设时段内接收到来自其他无线通信模块的通信连接请求时,获取所接收到的通信连接请求中的设备标识信息;
18、若所述设备标识信息与预设的设备标识信息库匹配成功时,与所述其他无线通信模块建立通信连接;
19、所述预设的设备标识信息库中包括预先备案的机器人的设备标识信息。
20、可选地,所述方法还包括:
21、若在无线通信模块启动后的第二预设时段内未接收到来自其他无线通信模块的通信连接请求时,或者所述设备标识信息与预设的设备标识信息库匹配失败时,关闭无线通信模块。
22、可选地,所述无线通信模块包括蓝牙通信模块、wifi模块。
23、一种机器人的过道避障装置,所述装置包括:
24、获取模块,用于获取机器人在移动过程中的状态信息;
25、配对模块,用于当所述状态信息满足预设的避障条件时,启动无线通信模块以寻求配对;
26、避障调整模块,用于当通过无线通信模块与其他机器人配对成功时,调整机器人的避障距离及机器人的移动速度;
27、其中,调整后的避障距离小于调整前的避障距离,调整后的移动速度小于调整前的移动速度。
28、一种计算机可读存储介质,所述计算机可读存储介质存储有计算机程序,所述计算机程序被处理器执行时实现如上所述的机器人的过道避障方法。
29、一种计算机设备,包括存储器、处理器以及存储在所述存储器中并可在所述处理器上运行的计算机程序,所述处理器执行所述计算机程序时实现如上所述的机器人的过道避障方法。
30、本发明实施例通过获取机器人在移动过程中的状态信息;当所述状态信息满足预设的避障条件时,启动无线通信模块以寻求配对;当通过无线通信模块与其他机器人配对成功时,表示机器人与其他机器人之间出现过道避障冲突,则调整机器人的避障距离及机器人的移动速度,其中,调整后的避障距离小于调整前的避障距离,调整后的移动速度小于调整前的移动速度,以使机器人双方能够顺利通过过道;从而解决了机器人间的过道避障冲突问题,实现了动态调整避障距离,提升了机器人避障功能的智能化程度,对机器人的功能配置要求低,仅需一个无线通信模块,有效地降低了避障成本。
技术特征:
1.一种机器人的过道避障方法,其特征在于,包括:
2.如权利要求2所述的机器人的过道避障方法,其特征在于,所述获取机器人在移动过程中的状态信息包括:
3.如权利要求2所述的机器人的过道避障方法,其特征在于,所述当所述状态信息满足预设的避障条件时,启动无线通信模块以寻求配对包括:
4.如权利要求3所述的机器人的过道避障方法,其特征在于,在调整机器人的避障距离及机器人的移动速度之后,所述方法还包括:
5.如权利要求1至4任一项所述的机器人的过道避障方法,其特征在于,所述启动无线通信模块以寻求配对包括:
6.如权利要求5所述的机器人的过道避障方法,其特征在于,所述方法还包括:
7.如权利要求1至4任一项所述的机器人的过道避障方法,其特征在于,所述无线通信模块包括蓝牙通信模块、wifi模块。
8.一种机器人的过道避障装置,其特征在于,所述装置包括:
9.一种计算机可读存储介质,所述计算机可读存储介质存储有计算机程序,其特征在于,所述计算机程序被处理器执行时实现如权利要求1至7任一项所述的机器人的过道避障方法。
10.一种计算机设备,包括存储器、处理器以及存储在所述存储器中并可在所述处理器上运行的计算机程序,其特征在于,所述处理器执行所述计算机程序时实现如权利要求1至7任一项所述的机器人的过道避障方法。
技术总结
本发明公开了一种机器人的过道避障方法、装置、介质及设备,包括:获取机器人在移动过程中的状态信息;当所述状态信息满足预设的避障条件时,启动无线通信模块以寻求配对;当通过无线通信模块与其他机器人配对成功时,调整机器人的避障距离及机器人的移动速度;其中,调整后的避障距离小于调整前的避障距离,调整后的移动速度小于调整前的移动速度。本发明解决了机器人间的过道避障冲突问题,实现了动态调整避障距离,提升了机器人避障功能的智能化程度,对机器人的功能配置要求低,仅需一个无线通信模块,有效地降低了避障成本。
技术研发人员:谭逍,柏林,刘彪,舒海燕,袁添厦,祝涛剑,沈创芸,王恒华,方映峰
受保护的技术使用者:广州高新兴机器人有限公司
技术研发日:
技术公布日:2024/5/10
- 还没有人留言评论。精彩留言会获得点赞!