一种多功能园林机器人仿生人手机械臂
本技术涉及机械臂器材,具体涉及一种多功能园林机器人仿生人手机械臂。
背景技术:
1、园林绿化工程是一种集多种景观和众多自然植物树木在内的大型建设工程,是随着城市化的推进而产生的园林工程,园林的管理需要大量的专业人才,也需要专门的机械设备来辅助管理和养护工作。
2、目前来说,现有使用的园林机械,包括草坪修剪、割灌机、绿篱修剪机、打药机等,但是这几种机械适用范围较窄,而且以上常用的园林机械往往功能较为单一;同时在处理园林时,操作人员需要携带多种机械才能实现处理好园林的效果。因此,本领域技术人员根据以上的缺陷和弊端,提出一种多功能园林机器人仿生人手机械臂。
技术实现思路
1、本实用新型的目的是提供一种多功能园林机器人仿生人手机械臂,以解决背景技术中所提出的不足之处。
2、而为了解决背景技术所述的弊端和缺陷,本实用新型提供如下技术方案:
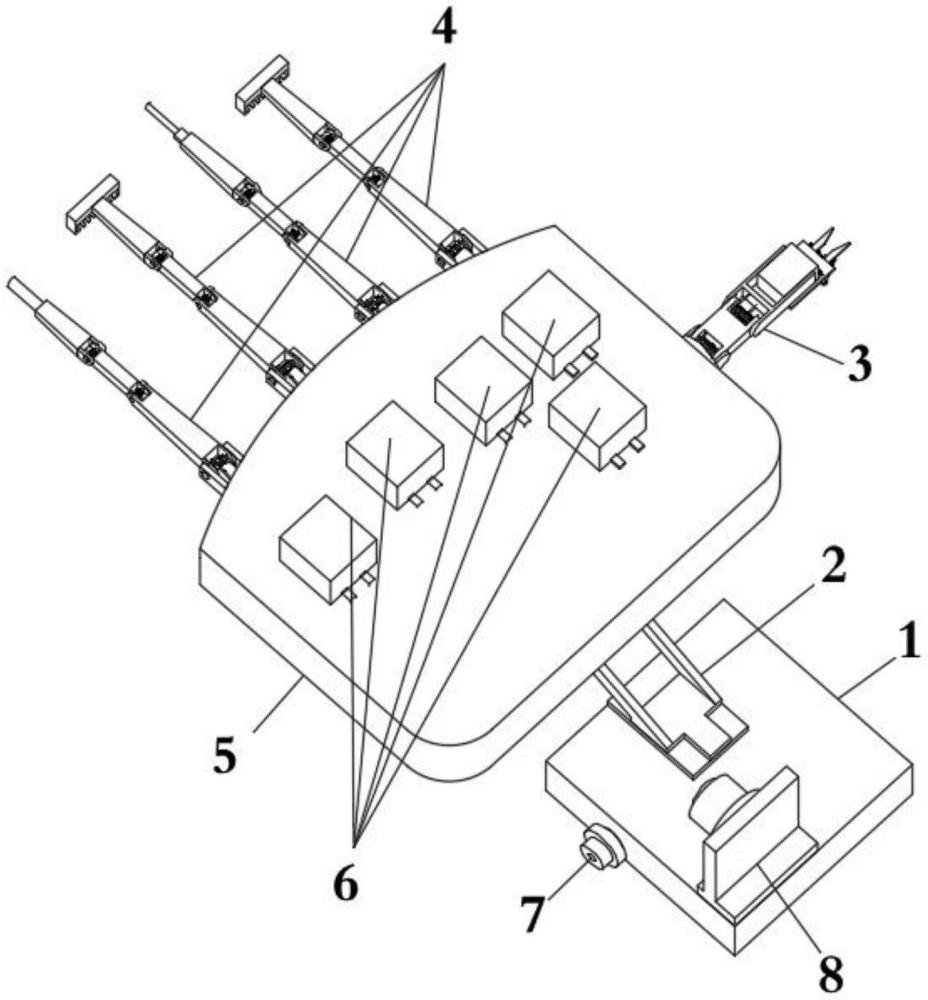
3、包括支撑座,固定在支撑座顶部表面上的连接杆,以及固定在连接杆顶端上的空心金属块,且空心金属块的右侧侧壁上设置有剪裁机械拇指组件,空心金属块的前端侧壁上设置有四组机械手指组件;
4、所述剪裁机械拇指组件包括固定在空心金属块右侧侧壁上的固定盘,与固定盘右侧侧壁铰接的工形连接杆,以及与工形连接杆的另一端铰接的h形连接板,且固定盘和工形连接杆的铰接处,以及工形连接杆和h形连接板的铰接处均设置有扭簧;
5、所述h形连接板远离工形连接杆的一端安装有伺服电机,伺服电机的底部表面固定有固定框架,且固定框架的底部表面上转动连接有两个相互啮合的半圈齿轮,半圈齿轮的右侧均固定有牙剪;伺服电机的输出轴上固定有第一连杆,第一连杆的另一端活动连接有第二连杆,第二连杆的另一端与后端所述半圈齿轮的底部表面活动连接;
6、四组所述机械手指组件均包括有与空心金属块的前端侧壁固定的支架,铰接在支架前端上的后段关节,以及与后段关节前端铰接的中段关节,且中段关节的前端上铰接有前段关节;支架、后段关节、中段关节和前段关节之间的铰接处均设置有拉簧。
7、作为本实用新型一种优选的方案,所述空心金属块的顶部表面上安装有五组舵机,用于控制四组所述机械手指组件和空心金属块的弯曲和展开。
8、作为本实用新型一种优选的方案,所述舵机的输出轴均贯穿到空心金属块的内腔中,且舵机位于空心金属块内腔的一端上均固定有收卷轮,收卷轮的外圈上缠绕设置有丝线。
9、作为本实用新型一种优选的方案,所述空心金属块位置处的丝线贯穿固定盘、工形连接杆并与h形连接板的左侧侧壁固定连接,用于收卷轮收卷丝线后带动工形连接杆和h形连接板围绕铰接点转动;所述机械手指组件位置处的丝线贯穿后段关节、中段关节并与前段关节的后端侧壁固定连接,用于收卷轮收卷丝线后带动后段关节、中段关节和前段关节围绕铰接点转动。
10、作为本实用新型一种优选的方案,所述支撑座的左侧侧壁上安装有与水管连接的喷头,且支撑座的顶部表面上设置有工业摄像头。
11、作为本实用新型一种优选的方案,四组所述前段关节远离中段关节的一端上自左向右分别安装有与营养液输送管连接的喷管、锄头、土壤温湿度传感器和铲斗。
12、作为本实用新型一种优选的方案,所述空心金属块的内部中开设有供收卷轮和丝线容纳的空腔。
13、作为本实用新型一种优选的方案,所述支撑座的底部表面通过螺栓安装在工业机械手臂的末端上,且工业机械手臂架设安装在履带式运输车的顶部表面。
14、在上述技术方案中,本实用新型提供的技术效果和优点:
15、本技术方案中,通过在机械手臂上端设置多根机械手指结构,通过手指关节处的弹簧回位,舵机拉动手指上的丝线收缩,完成人体手指打开与闭合的动作;每一根手指都有自己的独立功能,通过连杆机构配合舵机进行往复旋转运动,让拇指具有现实剪刀裁剪枝条的能力,食指与中指为小锄头,用于花园松土,中指是温湿度传感器,可以检测插入土壤中,检测水分情况,适时浇水补充,小拇指是小喷头,可以进行营养液的定量补给。
技术特征:
1.一种多功能园林机器人仿生人手机械臂,其特征在于:
2.根据权利要求1所述的一种多功能园林机器人仿生人手机械臂,其特征在于:所述空心金属块(5)的顶部表面上安装有五组舵机(6),用于控制四组所述机械手指组件(4)和空心金属块(5)的弯曲和展开。
3.根据权利要求2所述的一种多功能园林机器人仿生人手机械臂,其特征在于:所述舵机(6)的输出轴均贯穿到空心金属块(5)的内腔中,且舵机(6)位于空心金属块(5)内腔的一端上均固定有收卷轮(9),收卷轮(9)的外圈上缠绕设置有丝线(10)。
4.根据权利要求1所述的一种多功能园林机器人仿生人手机械臂,其特征在于:所述空心金属块(5)位置处的丝线(10)贯穿固定盘(31)、工形连接杆(32)并与h形连接板(33)的左侧侧壁固定连接,用于收卷轮(9)收卷丝线(10)后带动工形连接杆(32)和h形连接板(33)围绕铰接点转动;所述机械手指组件(4)位置处的丝线(10)贯穿后段关节(42)、中段关节(44)并与前段关节(45)的后端侧壁固定连接,用于收卷轮(9)收卷丝线(10)后带动后段关节(42)、中段关节(44)和前段关节(45)围绕铰接点转动。
5.根据权利要求1所述的一种多功能园林机器人仿生人手机械臂,其特征在于:所述支撑座(1)的左侧侧壁上安装有与水管连接的喷头(7),且支撑座(1)的顶部表面上设置有工业摄像头(8)。
6.根据权利要求1所述的一种多功能园林机器人仿生人手机械臂,其特征在于:四组所述前段关节(45)远离中段关节(44)的一端上自左向右分别安装有与营养液输送管连接的喷管、锄头、土壤温湿度传感器和铲斗。
7.根据权利要求1所述的一种多功能园林机器人仿生人手机械臂,其特征在于:所述空心金属块(5)的内部中开设有供收卷轮(9)和丝线(10)容纳的空腔。
8.根据权利要求1所述的一种多功能园林机器人仿生人手机械臂,其特征在于:所述支撑座(1)的底部表面通过螺栓安装在工业机械手臂的末端上,且工业机械手臂架设安装在履带式运输车的顶部表面。
技术总结
本技术公开了一种多功能园林机器人仿生人手机械臂,包括支撑座,固定在支撑座顶部表面上的连接杆,以及固定在连接杆顶端上的空心金属块,且空心金属块的右侧侧壁上设置有剪裁机械拇指组件,空心金属块的前端侧壁上设置有四组机械手指组件。本技术方案中,通过在机械手臂上端设置多根机械手指结构,通过手指关节处的弹簧回位,舵机拉动手指上的丝线收缩,完成人体手指打开与闭合的动作;通过连杆机构配合舵机进行往复旋转运动,让大拇指组件具有现实剪刀裁剪枝条的能力,食指与中指为小锄头,用于花园松土,中指是温湿度传感器,可以检测插入土壤中,检测水分情况,适时浇水补充,小拇指是小喷头,可以进行营养液的定量补给。
技术研发人员:周灵志,周迅明,张锴懿,陈博洋,陈煜祺,夏涵,蔡俊杰,陈语利,杨家骏,杨苗钰,李强
受保护的技术使用者:广东工业大学
技术研发日:20230921
技术公布日:2024/5/10
- 还没有人留言评论。精彩留言会获得点赞!