一种智能拐杖式助行、生活载物导航机器人的制作方法
1.本发明涉及一种智能拐杖式助行、生活载物导航机器人。
背景技术:
2.老人群体逐渐成为一个不可忽视的群体,老人的监护、陪伴、助行、买菜、看病、买药与在日常生活的一些日常生活所遇到的困难日益成为了热点。首先人体在衰老后,机体功能减弱,行走常常需要手杖支撑,否则老人很容易跌倒。其次老人外出买菜、购物时,体力有限,并且现在商场工作售货员日益减少,面对偌大的商场、菜市场、医院等,老人购物、看病、买菜等如何准确地到达目的地,引导老人到达心中的目的地(或商场超市货架、医院科室),减少体力支出,也俨然成为了一个问题;当购买了商场生活用品、食物、药瓶等,老人用手提取比较耗费体力,并且较为危险;同时老人视力会明显下降,行走避开障碍物也尤为重要。
技术实现要素:
3.本发明提出一种智能拐杖式助行、生活载物导航机器人,针对老人购物、看病、取药等场景,可以引导老人直接到达目的地,并携带购物篮的具有动力伴行系统,具有主动引导功能。
4.本发明解决上述问题的技术方案是:一种智能拐杖式助行、生活载物导航机器人,其特殊之处在于:
5.包括可伸缩手杖、购物篮和运动底盘;运动底盘与可伸缩手杖的下部固定,购物篮设置在运动底盘上,购物篮上方设有可以开合的盖板,在购物篮的前方安装有双目深度摄像头,用来实现判断是否到达了目的地;在购物篮摄像头下方安装有激光雷达,用来判断周围的障碍物;
6.可伸缩手杖的手柄上部设有健康监测模块与红外温度传感器,手柄下部设有响铃按钮,手柄上位于健康监测模块的前方设有摇杆与显示屏,摇杆用于手动操作机器人运行,显示屏用于显示健康监测模块与红外温度传感器监测是健康参数数据;在手杖上部设置一个平台,该平台上设置急停按钮与收纳盒,在收纳盒下面安装有血氧传感器,用于采集心率与血氧数据;平台底部安装有语音麦克风;手杖上部设有喇叭,喇叭用于响铃与语音播报;
7.所述运动底盘上设有控制柜和多个电机,电机轴连接滚轮,控制柜中集成了控制系统;控制系统分别获取双目深度摄像头、激光雷达、健康监测模块、红外温度传感器、血氧传感器采集的数据,摇杆通过控制系统来控制电机的运行;控制系统根据语音麦克风获取的指令对机器人进行控制。
8.进一步地,上述控制系统包括stm32数据采集板、stm32末端控制板、树莓派、5g nbiot、uwb无线定位、gps模块与驱动控制板等模块;电机为带有500线编码器的动力电机。
9.进一步地,上述机器人通过树莓派的wifi下载离线地图,依靠gps模块进行导航,同时依靠摄像头与雷达采集回来的点云数据,在树莓派上面进行分析,实时避障遇到水坑
或则断路等情况,即可调整规划路线。
10.当机器人来到商场或者医院等地,机器人可利用树莓派的wifi接入当地得局域网内,通过指纹法,获得障碍物以及目的地的大致范围,利用dijkstra算法计出路径,在运行过程中不断的通过雷达与摄像头获取路径上的点云信息,不断对之前的路径进行反馈修订,同时会根据摄像头在路径上识别的事物通过网络搜索确定该物品的详细信息,并且在该路径上打标记,并将最新路径数据存为离线地图。
11.进一步地,上述机器人通过stm32数据采集板获取健康监测模块(jfh11)、红外温度传感器与血氧传感器测得的脉搏、体温、心率、血氧等健康参数,再通过5g nbiot模块传回服务器,老人的监护人与主治医生就可通过手机端app实时查看老人的健康状况,同时通过摄像头传回的实时画面可让监护人实时清楚老人所处的环境地理信息。如果健康参数超出正常值就会进行预警,并对监护人与老人进行提示报警,通过放置手杖中部的喇叭向老人提示,老人可通过手杖上的响铃按钮进行对stm32末端控制板发出信号,使喇叭发出铃声,提示周围的人。
12.进一步地,上述机器人的stm32末端控制板是由contexm4为内核的mcu为核心处理器,板载mpu6050整合6轴运动处理组件,获取助行器的三轴速度与陀螺仪信息,以获得助行器姿态信息,通过tcp/ip通信反馈机器人控制器进行小车姿态安全监测,进而通过5g nb-iot通信模块传递到云端服务器,以便远程端用户查看实时情况。通过tcp/ip通信端口,发送里程计信息,获取由树莓派根据实时路况经过闭环位置pid的运动控制指令。stm32末端控制板是通过pwm捕获功能获得四个驱动电机的里程计信息,利用pi控制对四个伺服电机进行速度闭环控制,通过mcu stm32f407输出pwm波到驱动控制板上,进而控制电机。
13.进一步地,上述机器人通过超宽带无线通信技术(uwb)使机器人与患者的间距保持,uwb定位系统可实时更新位置信息,老人携带无线标签,实现老人的实时精确定位。获得数据后,设计了角度与位置分离双闭环控制方式,以确保机器人系统跟随用户的运动趋势,同时也不会对用户的运动造成障碍,同时设计了α、β对角度与距离控制灵敏度进行调节,防止转向以及距离控制过快变化。
14.进一步地,上述手杖上部与手杖下部通过弹簧按钮的形式进行调整高度。
15.进一步地,上述购物篮中间带有隔板,将购物篮分为若干空间,可以实现物品分类存放。
16.进一步地,上述购物篮上方的盖板上表面设有软垫,老人可以坐在软垫上休息;可伸缩手杖的上部设有挂钩,购物篮中空间不够还可挂在手杖的上的挂钩上。
17.进一步地,为了避免机器人作为一个手杖功能不对老人行走形成障碍,在运动底盘和购物篮靠近人体部分设计深度10cm的凹形结构。
18.本发明的优点:
19.1、本发明提出一种智能拐杖式助行、生活载物导航机器人,结合了手杖、助行与动力购物篮的设计,使该机器人可以适应更为复杂的应用场景。
20.2、本发明可自适应跟随不同老人的运动速度,以及老人在不同疲脑程度的运动。
21.3、本发明通过健康信号进行判定老人的健康状态,提供了老人短暂休息的平台。
22.4、本发明可同时拥有室内与室外导航两种方式。
23.5、本发明通过摄像头、雷达对实时路况进行分析,有效提前规避了障碍物。
附图说明
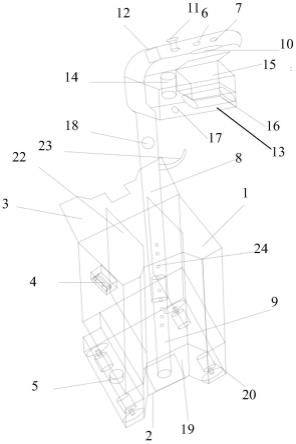
24.图1是本发明实施例中智能拐杖式助行、生活载物导航机器人的整体结构图;
25.图2是控制系统的配合图;
26.图3是控制系统内部各模块的关系图;
27.图4是uwb定位系统的逻辑图。
28.图中所示:
29.1-购物篮;2-运动底盘;3-盖板;4-摄像头;5-雷达;6-健康监测模块;7-红外温度传感器;8-手杖上部;9-手杖下部;10-响铃按钮;11-摇杆;12-显示屏;13-平台;14-急停按钮;15-收纳盒;16-血氧传感器;17-语音麦克风;18-喇叭;19-控制柜;20-电机;21-弹簧按钮;22-隔板;23-挂钩;24-通孔。
具体实施方式
30.为使本发明实施方式的目的、技术方案和优点更加清楚,下面将结合本发明实施方式中的附图,对本发明实施方式中的技术方案进行清楚、完整地描述,显然,所描述的实施方式是本发明一部分实施方式,而不是全部的实施方式。基于本发明中的实施方式,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施方式,都属于本发明保护的范围。因此,以下对在附图中提供的本发明的实施方式的详细描述并非旨在限制要求保护的本发明的范围,而是仅仅表示本发明的选定实施方式。
31.现有一些助行器或者老人购物车功能设置单一,大多依靠老人给一个主动的信号,作为控制信号来控制机器人进行运动,而机器人本身不具有主动引导功能。导致老人常常在商场、医院等复杂环境内迷路,无法到达想要到达的货架或科室,浪费很多时间并且让老人处于一种危险的状态。为防止老人在这种情况下和日常生活中不清楚自身的身体状况,且设有健康监护的手杖缺乏动力与稳定性。本发明结合健康监测、助行与自动导航购物车引导,合理协调了各个系统的关系,使得本发明的机器人可以适应更为复杂的应用场景。
32.参见图1,本发明提出一种智能拐杖式助行、生活载物导航机器人,包括可伸缩手杖、购物篮1和运动底盘2;运动底盘2与可伸缩手杖的下部固定,购物篮1设置在运动底盘2上,购物篮1上方设有可以开合的盖板3,在购物篮1的前方安装有摄像头4,用来实现判断是否到达了目的地;在购物篮1摄像头4下方安装有雷达5,用来判断周围的障碍物。可伸缩手杖的手柄上部设有健康监测模块6(jfh11)与红外温度传感器7,手柄下部设有响铃按钮10,手柄上位于健康监测模块6的前方设有摇杆11与显示屏12,摇杆11用于手动操作机器人运行,显示屏12用于显示健康监测模块6与红外温度传感器7监测是健康参数数据;在手杖上部8设置一个平台13,该平台13上设置急停按钮14与收纳盒15,小物件盒子可放一些小东西,如急救药瓶等,急停按钮14用紧急情况,紧急制动。在收纳盒15下面安装有血氧传感器16,用于采集心率与血氧数据;平台13底部安装有语音麦克风17;手杖上部8设有喇叭18,喇叭18用于响铃与语音播报;所述运动底盘2上设有控制柜19和多个电机20,电机轴连接滚轮,控制柜19中集成了控制系统;控制系统分别获取摄像头4、雷达5、健康监测模块6、红外温度传感器7、血氧传感器16采集的数据,摇杆11通过控制系统来控制电机20的运行;控制系统根据语音麦克风17获取的指令对机器人进行控制。
33.作为本发明的一个优选实施例,摄像头4为双目深度摄像头,雷达5为激光雷达,融
合了雷达与视觉点云数据进行避障控制。激光雷达与双目深度摄像头优势互补,以获得更加的避障效果。
34.作为本发明的一个优选实施例,参见图3,所述控制系统包括stm32数据采集板、stm32末端控制板、树莓派、5g nbiot、uwb无线定位、gps模块与驱动控制板,在运动底盘上安装了四个带有500线编码器的动力电机。
35.具体地,参见图3,所述机器人通过树莓派的wifi接口下载离线地图,依靠gps模块进行导航,同时依靠摄像头4与雷达5采集回来的点云数据,在树莓派上面进行分析,考虑到机器人的第一性原则,在做出执行动作前需要争得使用者得同意,才能够执行运动命令。为避免地图上面路标信息未能及时得更新,实时避障遇到水坑或则断路等情况,即可调整规划路线。
36.当机器人来到商场或者医院,机器人可利用树莓派的wifi接入当地得局域网,获取室内布局,如老人需要购物,只要通过麦克风说出自己所需要购买的商品,机器人就可通过商场室内信息将老人带到目的地,同时通过安装在购物篮上的双目摄像头与激光雷达进行避障。最后,通过摄像头进行识别到达目的地的商品是不是老人需要购买的。机器人通过指纹法,获得障碍物以及目的地的大致范围,利用dijkstra算法计出路径,在运行过程中不断的通过雷达5与摄像头4获取路径上的点云信息,不断对之前的路径进行反馈修订,同时会根据摄像头4在路径上识别的事物通过网络搜索确定该物品的详细信息,并且在该路径上打标记,并将最新路径数据存为离线地图。依靠指纹法来到目的地附近,此时依然不能获取准确的目的地信息,机器人首先依靠自身雷达与摄像头通过rrt自动搜索路径,在该区域内缓慢移动,在此过程中也属于机器人的学习过程。利用摄像头的图像信息与接受的目的指令进行匹配直至匹配成功。在医院内,则能够将老人准确的带到老人要去的科室看病。购买完了还会提醒老人将物品放进购物篮内。购物篮底部放置的压力检测模块,通过树莓派的io口采集压力数据,当离开商场前往下一目的地或者回家,将会根据篮子内物品与机器人本身的重量与gps模块获取的商场回家的距离进行计算,然后根据电压采集模块采集回来的电源电压,计算剩余电量进行计算预警,提示需要充电。一般情况下电压低于10v就会提醒老人进行充电。gps传感器获取用户当前的经纬度位置信息,由stm32数据采集板通过串口获取模块的信息,并通过5g nb-iot通信模块传递到云端服务器,有效防止用户独自出行出现迷路而得不到救援情况的发生。在运动过程中遇到前方有人,可通过手杖上的响铃按钮进行对stm32末端控制板发出信号,使喇叭发出铃声,提示周围的人。
37.具体地,参见图3,所述机器人通过stm32数据采集板获取健康监测模块6、红外温度传感器7与血氧传感器16测得的脉搏、体温、心率、血氧健康参数,再通过5g nbiot模块传回服务器,用户的监护人与主治医生就可通过手机端app实时查看用户的健康状况,同时通过摄像头4传回的实时画面可让监护人实时清楚用户所处的环境地理信息;如果健康参数超出正常值就会进行预警,并对监护人与用户进行提示报警,通过放置手杖中部的喇叭18向用户提示,用户可通过手杖上的响铃按钮10进行对stm32末端控制板发出信号,使喇叭18发出铃声,提示周围的人。
38.该部分完成用户生理健康数据的采集与上传,实现健康信号监测并进行预警。健康数据采集板搭载stm32f103为mcu进行数据采集以及转换。具有健康检测模块使用串口传输,获取脉搏信号,红外测温模块通过i2c总线获取用户体温数据,gps位置信息通过串口传
递到数据采集板,传递到树莓派上进而进行导航控制,血氧心率模块是一个集成的传感器可通过串口同时获得心率、脉搏血氧饱和度、血流灌注指数等数据。将数据打包通过5g nb-iot通信模块传递到云端服务器,以家人与主治医生实时了解老人的身体情况。同时可向老人远程提出建议,通过语音模块进行播放建议给老人。当检测到生理状况出现陡变(心率上升高、体温上升等),机器人启动制动功能,stm32末端控制板通过语音模块提醒老人休息。
39.具体地,参见图3,所述机器人的stm32末端控制板是由contexm4为内核的mcu为核心处理器,板载mpu6050整合6轴运动处理组件,获取助行器的三轴速度与陀螺仪信息,以获得助行器姿态信息,通过tcp/ip通信反馈机器人控制器进行小车姿态安全监测,进而通过5g nb-iot通信模块传递到云端服务器,以便远程端用户查看实时情况;通过tcp/ip通信端口,发送里程计信息,获取由树莓派根据实时路况经过闭环位置pid的运动控制指令;stm32末端控制板是通过pwm捕获功能获得四个驱动电机20的里程计信息,利用pi控制对四个伺服电机20进行速度闭环控制,通过mcu stm32f407输出pwm波到驱动控制板上,进而控制电机20。驱动器采用wsdc2412d的大电流12a/24v双通道直流有刷电机驱动器,可输出功率达到290w,为驱动伺服控制提供了动力的保障。四个伺服电机选用m60电机,添加1:47的减速器,输出额定扭矩达到145.4kg.cm,保证了助行系统的机械动力。pi闭环控制有效避免了助行的稳定性,防止助行器飞车的同时防止了溜车的现象发生。用户可通过摇杆进行控制助行系统的前进、后退、左转和右转等操作,控制板通过ad通道采集摇杆控制数据,以判断用户的运动意图,发出pwm驱动信号。同时在末端控制板上设置了语音控制功能,当用户说出相应的指令(前进、后退、左转、右转、停止等),助行系统也会产生pwm波进而驱动伺服电机运动。
40.具体地,参见图3和图4,在导航、伴行过程中通过uwb无线定位模块确定机器人与老人的距离与角度问题,设置机器人与老人的位置与角度,通过pid控制在机器人运动过程中保持平稳的距离与角度,进行平稳跟随与导航控制。所述机器人通过超宽带无线通信技术uwb使机器人与患者的间距保持,uwb定位系统可实时更新位置信息,老人携带无线标签,实现老人的实时精确定位;获得数据后,设计了角度与位置分离双闭环控制方式,以确保机器人系统跟随老人的运动趋势,同时也不会对用户的运动造成障碍,同时设计了α、β对角度与距离控制灵敏度进行调节,防止转向以及距离控制过快变化。
41.作为本发明的一个优选实施例,所述手杖上部8与手杖下部9之间为套接连接。参见图1和图2,手杖上部8套入手杖下部9,二者相对应位置设有通孔24,弹簧按钮21设置在手杖下部9的通孔24,调节到合适的高度后,二者的通孔24重合,弹簧按钮21前端部分从手杖上部8的通孔伸出,完成高度的调整。
42.作为本发明的一个优选实施例,参见图1,所述购物篮1中间带有隔板22将购物篮1分为若干空间,可以实现物品分类存放。
43.作为本发明的一个优选实施例,参见图1,所述购物篮1上方的盖板3上表面设有软垫,用户可以坐在软垫上休息;可伸缩手杖的上部设有挂钩23,购物篮1中空间不够还可挂在手杖的上的挂钩23上。
44.作为本发明的一个优选实施例,参见图1,为了避免机器人作为一个手杖功不对老人行走形成障碍,在运动底盘2和购物篮1靠近人体部分设计深度10cm的凹形结构,凹形结构内的两侧呈45度的倒角。
45.以上所述仅为本发明的实施例,并非以此限制本发明的保护范围,凡是利用本发明说明书及附图内容所作的等效结构或等效流程变换,或直接或间接运用在其他相关的系统领域,均同理包括在本发明的保护范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1