一种快速部署系统的架构的制作方法
1.本发明主要涉及机器人项目控制领域,尤其涉及一种快速部署系统的架构。
背景技术:
2.近年来,随着工业机器人的应用越来越普及,制造业从传统的多个工艺环节多个工件的针对性单机自动化装备转向机器人可执行多个工位和对象的阶段。目前工业4.0和智能制造的概念越来越深入人心,制造业面临的需求也从传统的大批量标准化加工转向快换型、多品类、定制化的方向,此时工业机器人便会得到更多更广泛的推广与应用。新时代的柔性化智能制造场景,在设备层面会应用很多传感器,用于感知对象与执行设备的状态,从而更好的监控与维护系统的运转。
3.面对柔性的制造业需求时,工业机器人通常会与多种传感器相结合来应对多个变化场景或者单一场景下的多任务需求。比如,通常智能制造装配场景中主控系统通常需要与机器人、接近传感器、视觉传感器、力觉传感器等结合使用。当遇到制造对象发生变化时,其适配的传感器类型与传感器数据也会发生变化。此时,传统方法面临离线下手动改线,连接主控设备与传感设备及执行设备,以及分别对单一设备进行数据调试等工作,且主控plc需要分别与多类传感器单独互联设置。这种方式效率低,适应性差,严重影响生产节拍,不适应现代智能制造的生产需求。
4.因此,本领域的技术人员致力于开发一种能够针对多种机器人作业场景快速部署传感器配置,实现数据快速统一、配置快速调整、方案快速部署的系统架构。
技术实现要素:
5.有鉴于现有技术的上述缺陷,本发明所要解决的技术问题包括:
6.如何设计一种系统架构能够针对多种机器人作业场景快速部署传感器配置,实现数据快速统一、配置快速调整。
7.为实现上述目的,本发明提供了一种快速部署系统的架构,包括plc、传感器、执行端;所述plc包括基于api层的上位控制模块,所述传感器与plc数据对接;所述执行端与plc数据对接。
8.进一步地,所述上位控制模块包含项目初始化、plc硬件视图配置、plc程序块的导入、项目的编译下载及运行功能。
9.进一步地,所述传感器是2d视觉系统和/或3d视觉系统、力觉传感器、应力传感器、温度传感器和/或距离传感器。
10.进一步地,所述执行端是工业机器人,协作机器人,机械手和/或械臂;所述执行端上还包括执行器,所述执行器包含吸盘,夹爪,电批,专用末端执行器拧螺母机、焊枪、电磨头,工具快换装置,柔性手,仿生多指灵巧手。
11.进一步地,还包括用户交互模块,所述用户交互模块与plc数据对接。
12.进一步地,所述上位控制模块按照典型场景将涉及到的参数调节内容暴露到用户
交互模块中。
13.进一步地,所述参数包含位置调节参数、角度调节参数,坐标系调节参数。
14.进一步地,所述典型场景包含上下料,分拣,搬运,焊接,金属加工、抛光打磨、装配、码垛。
15.进一步地,所述上位控制模块提供作业项目的实时监控与报错机制。
16.进一步地,所述实时监控包含对项目逻辑判定的监控,传感器的监控,对机器人状态的监控,plc运行状态的监控,网络通讯状态的监控,通讯数据交换区的监控;所述实时监控对逻辑判定的监控,包括有无到位,有无下料,对传感器的监控包括工作状态是否正常有无故障和报警,机器人,plc工作状态是否正常有无故障和报警,系统网络通讯是否正常有无中断和报警,实时监控传感器,机器人,plc的通讯数据。
17.与现有技术方案相比,本发明的技术效果在于:本发明借助对多种类型传感器底层软件框架的分析,以及对多种类型传感器数据通讯协议的理解,搭建以plc为主控,以多种传感器为感知手段,以机器人为实施对象的快速部署架构,解决常规多传感机器人作业系统下多场景切换时的系统快速部署方案。
18.以下将结合附图对本发明的构思、具体结构及产生的技术效果作进一步说明,以充分地了解本发明的目的、特征和效果。
附图说明
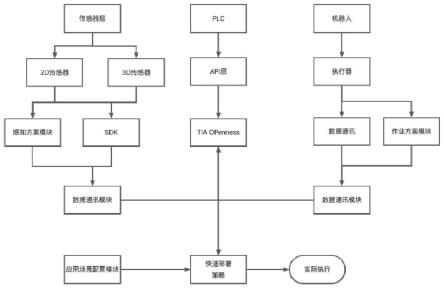
19.图1是本发明一个实施例的架构图;
20.图2是本发明一个实施例的流程图。
具体实施方式
21.以下参考说明书附图介绍本发明的多个优选实施例,使其技术内容更加清楚和便于理解。本发明可以通过许多不同形式的实施例来得以体现,本发明的保护范围并非仅限于文中提到的实施例。
22.在附图中,结构相同的部件以相同数字标号表示,各处结构或功能相似的组件以相似数字标号表示。附图所示的每一组件的尺寸和厚度是任意示出的,本发明并没有限定每个组件的尺寸和厚度。为了使图示更清晰,附图中有些地方适当夸大了部件的厚度。
23.如图1所示,一种快速部署系统的架构,包括plc、传感器、执行端;所述plc包括基于api层的上位控制模块,所述传感器与plc数据对接;所述执行端与plc数据对接。
24.所述一种plc,指西门子s7-1500 plc,s7-1200 plc,三菱fx-5u plc,欧姆龙nx系列plc。
25.所述的api层tia openness,siemens.engineering.dll,s7.net.dll和pchmi.dll。
26.所述上位控制模块包含项目初始化、plc硬件视图配置、plc程序块的导入、项目的编译下载及运行功能。
27.所述传感器是2d视觉系统和/或3d视觉系统、力觉传感器、应力传感器、温度传感器和/或距离传感器。
28.所述执行端是工业机器人,协作机器人,机械手和/或械臂;所述执行端上还包括
执行器,所述执行器包含吸盘,夹爪,电批,专用末端执行器拧螺母机、焊枪、电磨头,工具快换装置,柔性手,仿生多指灵巧手。
29.还包括用户交互模块,所述用户交互模块与plc数据对接。
30.所述上位控制模块按照典型场景将涉及到的参数调节内容暴露到用户交互模块中。
31.所述参数包含位置调节参数、角度调节参数,坐标系调节参数。
32.所述典型场景包含上下料,分拣,搬运,焊接,金属加工、抛光打磨、装配、码垛。
33.所述上位控制模块提供作业项目的实时监控与报错机制。
34.所述实时监控包含对项目逻辑判定的监控,传感器的监控,对机器人状态的监控,plc运行状态的监控,网络通讯状态的监控,通讯数据交换区的监控;所述实时监控对逻辑判定的监控,包括有无到位,有无下料,对传感器的监控包括工作状态是否正常有无故障和报警,机器人,plc工作状态是否正常有无故障和报警,系统网络通讯是否正常有无中断和报警,实时监控传感器,机器人,plc的通讯数据。
35.一种应用该系统架构的部署方法,以相机为例,如图2所示,
36.步骤一:定义统一的接口,所述定义统一的接口,设置plc智能相机信息,加载相机和plc硬件配置的功能模块,相机方案的配置模块,plc程序块,编译下载,和执行状态的显示,提供统一的接口;
37.步骤二:定义与相机和操作相关的人机界面接口;
38.为操作者提供统一的人机操作界面,便于使用者操作和管理整个快速部署系统,提高了操作的便捷性和高效性;
39.步骤三:加载智能相机和plc的快速部署配置文件;
40.加载相机和plc的硬件配置生成组态文件;
41.步骤四:加载智能相机方案的快速部署配置文件;
42.通过加载智能相机的配置生成组态文件;
43.步骤五:加载plc程序块的快速部署配置文件;
44.加载把xml文件导入到plc cpu里;
45.步骤六:编译下载运行快速部署项目文件;
46.在pc端整个项目生成的缓存文件,编译下载到plc的cpu里,然后运行plc。
47.针对大恒2d智能相机具体实施
48.步骤一:初始化项目
49.1.1操作生成并激活plc项目,创建项目,新建项目名称,会显示正在访问tia portal所示的窗口,则成功连接并打开tia portal项目
50.步骤二:连接并配置传感
51.2.1配置s7-1500 plc和大恒智能2d相机和ur5协作机器人的通讯方式和接口,接口通讯地址,设备名称的设置;
52.2.2大恒智能2d相机方案的选择与设置
53.第1步:安装好调试相机的客户端安装软件,使用管理工具
54.pallasmanagetool.exe,枚举设备,并配置pallas相机ip和pc在同一网段
55.第2步:merlic连接pallas相机
56.pallas相机通过网线连接到pc上,并确保pallas ip和pc在同一网段后,打开merlic软件:
57.第3步:“从相机获取图像”工具拖动到工具流程框内,点击工具的“设备”参数,选择“使用第一个可用相机”连接相机
58.第4步:把工具库里“读取qr码”工具拖动到工具流程框内,
59.第5步:为了实现与外部设备的交互,还可以进行io等通信的设置,设置触发输入io pallas
60.第6步:弹出的“创建接口参数”对话框中,描述字符:可任意设置字符串(英文);数据类型:必须设置为“string_80”。
61.第7步:设计完成应用程序后,点击“打开designer”按钮,设置程序前端显示的gui界面,并连接需要显示工具的参数test.mvapp,把小组件库里的组拖放到界面相对应的位置;
62.第8步:设计完成后,保存应用程序
63.第9步:在pallasmanagetool添加应用程序test,运行
64.pallasmanagetool.exe程序,打开pallas管理工具,在枚举设备列表中,选择需要上传程序的设备,显示当前设备应用程序列表,选择应用程序“test.mvapp”,确定即可完成程序添加
65.第10步:应用程序启动
66.选择需要运行的应用程序列表行,勾选“当前运行”列下的单选框,相机内部会直接运行该应用程序,可以使用merlic的frontend连接,查看运行情况。
67.第13步:运行程序
68.使用管理工具的调试页面“打开merlic前端”,即可通过模拟单次触发,也可以通输入modbus tcp触发;
69.2.3基于api层面的plc组态自动生成
70.基于api层面会把s7-1500 plc和大恒智能2d相机和ur5协作机器人的组态生成准备下载到plc的文件;
71.步骤三:业务方案配置
72.3.1把业务配置的整个项目的方案,s7-1500 plc和大恒智能2d相机和ur5协作机器人,拍照抓料控制方案的项目,自动加载到plc端;
73.步骤四:编译下载
74.4.1选择相机拍照机器人抓料放料这个场景的流程后,软件自动编译整个项目,然后下载到plc的cpu里,并运行plc,执行plc程序;
75.步骤五:实时监控
76.plc,传感器,机器人运行后,上位人机窗口,实时监控plc,传感器,机器人的运行状态和数据状态;
77.如果plc传感器,机器人有报警,可以根据通讯读取到的不同的报警信息,采取相应的处理办法。
78.二.针对photoneo 3d智能相机具体实施
79.步骤一:初始化项目
80.1.1操作生成并激活plc项目,创建项目,新建项目名称,会显示正在访问tia portal所示的窗口,则成功连接并打开tia portal项目
81.步骤二:连接并配置传感
82.2.1配置s7-1500 plc和photoneo 3d相机和ur5协作机器人的通讯方式和接口,接口通讯地址,设备名称的设置;
83.2.2photoneo 3d相机方案的选择与设置
84.通过photoneo 3d相机客户端软件,配置拍照方式,拍照数据传输区,触发源;
85.2.3基于api层面的plc组态自动生成
86.基于api层面会把s7-1500 plc和大恒智能2d相机和ur5协作机器人的组态生成准备下载到plc的文件;
87.步骤三:业务方案配置
88.3.1把业务配置的整个项目的方案,s7-1500 plc和大恒智能2d相机和ur5协作机器人,拍照抓料控制方案的项目,自动加载到plc端;
89.步骤四:编译下载
90.4.1选择相机拍照机器人抓料放料这个场景的流程后,软件自动编译整个项目,然后下载到plc的cpu里,并运行plc,执行plc程序;
91.步骤五:实时监控
92.plc,传感器,机器人运行后,上位人机窗口,实时监控plc,传感器,机器人的运行状态和位置姿态数据;
93.如果plc,传感器,机器人有报警,可以根据通讯读取到的不同的报警信息,采取相应的处理办法。
94.以上详细描述了本发明的较佳具体实施例。应当理解,本领域的普通技术无需创造性劳动就可以根据本发明的构思作出诸多修改和变化。因此,凡本技术领域中技术人员依本发明的构思在现有技术的基础上通过逻辑分析、推理或者有限的实验可以得到的技术方案,皆应在由权利要求书所确定的保护范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1