一种直线插补同步控制方法与流程
本发明属于直线插补,具体涉及一种直线插补同步控制方法。
背景技术:
1、目前市面上直线运动的插补,一般都是在每个脉冲量里单独的x轴方向运动或者y轴方向的运动,采用上述控制方法容易造成速度响应的间断不连续,走出来的轨迹也是由折线构成。由于速度的间断让整个运动效率很低,且轨迹无法逼近直线,和实际理想的直线有很大的偏差。
2、因此,一种直线插补同步控制方法亟待提出。
技术实现思路
1、为解决现有技术存在的缺陷,本发明提供一种直线插补同步控制方法。
2、为了解决上述技术问题,本发明提供了如下的技术方案:
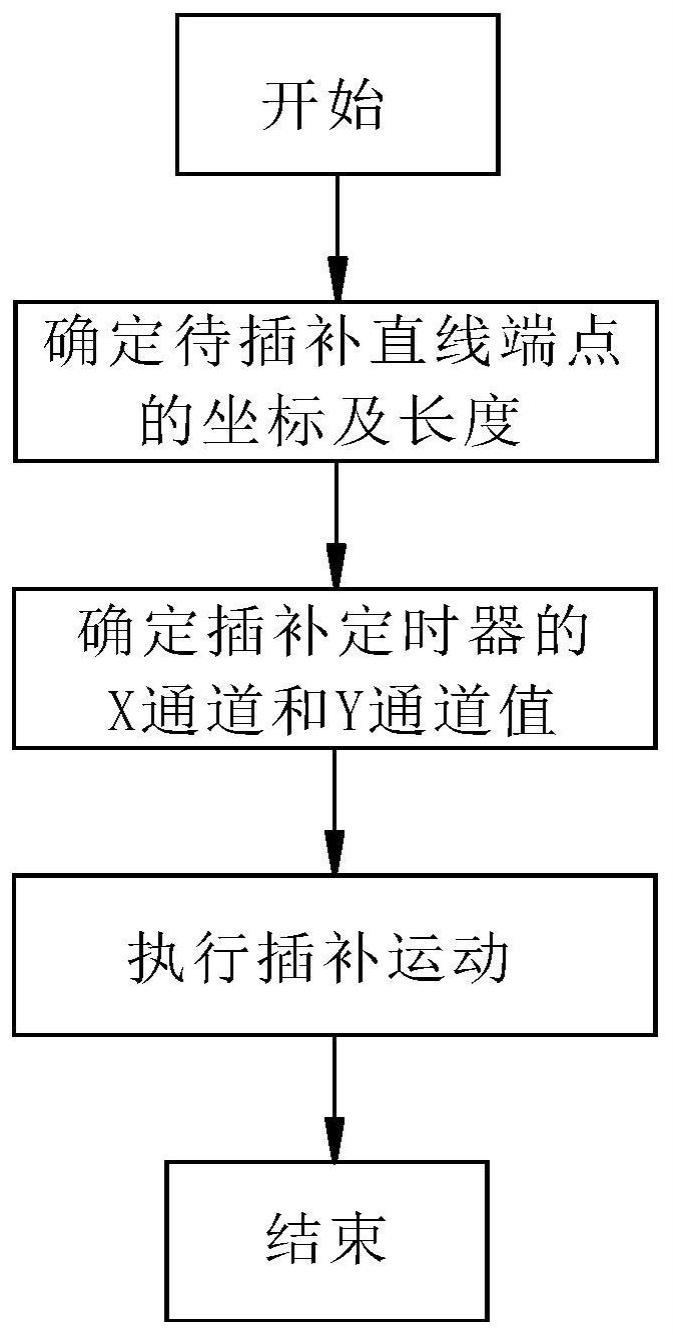
3、本发明提供一种直线插补同步控制方法,包括以下步骤:
4、s1、在笛卡尔坐标下,根据工业机器人正运动学方程获得待插补直线运动的插补起点a及插补终点b,所述插补起点a的坐标表示为(x0,y0),所述插补终点b的坐标表示为(xi,yi),从而得到插补起点a和插补终点b两点件的距离s:
5、s2、将在笛卡尔坐标下的运动速度表示为v,计算获得x轴运动速度vx为cosav,y轴运动速度vy为sinav,然后计算得出插补运行的总时间t:t=s/v,给定时器的x通道和y通道赋值;
6、其中,根据tg a=(yi-y0)/(xi-x0),计算得出a的值;
7、s3、打开定时器,让定时器的两个速度分量同时进行,从而使得x轴和y轴同步运行。
8、优选的,在加速或减速运动时,每走一步,定时器都重新获得计数值,且定时器每次运算时间不超过60us。
9、优选的,步骤s2中x轴运动速度vx和y轴运动速度vy采用累计取余补偿的方法降低误差。
10、本发明相较于现有技术,具有以下有益效果:
11、本发明通过将定时器的两个速度分量同时进行,从而实现x轴和y轴同步运动,使得速度响应连续不间断,大大提高工作效率,且运动轨迹达到理想的直线。
技术特征:
1.一种直线插补同步控制方法,其特征在于,包括以下步骤:
2.根据权利要求1所述的直线插补同步控制方法,其特征在于,在加速或减速运动时,每走一步,定时器都重新获得计数值,且定时器每次运算时间不超过60us。
3.根据权利要求1所述的直线插补同步控制方法,其特征在于,步骤s2中x轴运动速度vx和y轴运动速度vy采用累计取余补偿的方法降低误差。
技术总结
本发明公开了一种直线插补同步控制方法,包括以下步骤:S1、在笛卡尔坐标下,根据工业机器人正运动学方程获得待插补直线运动的插补起点A及插补终点B,从而得到插补起点A和插补终点B两点件的距离S;S2、将在笛卡尔坐标下的运动速度表示为V,计算获得X轴运动速度Vx为cosaV,Y轴运动速度Vy为sinaV,然后计算得出插补运行的总时间T:T=S/V,给定时器的X通道和Y通道赋值;S3、打开定时器,让定时器的两个速度分量同时进行,从而使得X轴和Y轴同步运行。本发明通过将定时器的两个速度分量同时进行,从而实现X轴和Y轴同步运动,使得速度响应连续不间断,大大提高工作效率,且运动轨迹达到理想的直线。
技术研发人员:吴华,王中华,杨晓珍
受保护的技术使用者:苏州富强科技有限公司
技术研发日:
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!