一种发电厂自动避障巡检机器人的制作方法
本发明属于巡检机器人,具体为一种发电厂自动避障巡检机器人。
背景技术:
1、发电厂又称发电站,是将自然界蕴藏的各种一次能源转换为电能的工厂。在发电厂的日常工作过程中,通常需要对发电厂中的各个设备以及输电线路等进行巡检操作,以保证电厂的安全运行,且需要二十四小时不间断巡检,为此所带来的劳动量是巨大的,为了有效减轻巡检负担,现有技术中一般采用巡检机器人代替人力进行巡检,其一般具备自驱动功能可按照既定路线对各种设备进行巡检,有效减少人力的消耗。
2、目前在电厂中所使用的巡检机器人一般为轮式驱动和履带式驱动,二者驱动方式不同,在电厂的日常巡检过程中,巡检路面并非十分平整,常会出现一定的障碍物阻挡机器人的正常运行,而采用履带式的驱动方式,其行驶速度较慢,且容易造成地面的损坏,且履带部分极易损坏,所以在高强度的巡检过程中已摒弃不用,而采用轮式驱动时,其越障能力主要依靠其底盘的离地间隙,当遇到高于其底盘间隙的障碍物时仅能进行反复尝试绕行,通行效率较低。
3、由于电厂的巡检环境复杂,在日常的巡检过程中,常会出现阻碍机器人正常行进的障碍物,目前所采用的方法一般是使用激光避障传感器来对障碍物进行扫描,这种传感器一般都是安装在机器人接近底端的位置上,其可对大多数障碍物进行扫描,但出现低于底盘的障碍物时,其无法进行扫描,此时整个机器人存在一定的托底风险,所以如何对较大障碍物以及较小障碍物进行扫描实现避障是十分有必要的。
技术实现思路
1、本发明的目的在于提供一种发电厂自动避障巡检机器人,以解决上述背景技术中提出的问题。
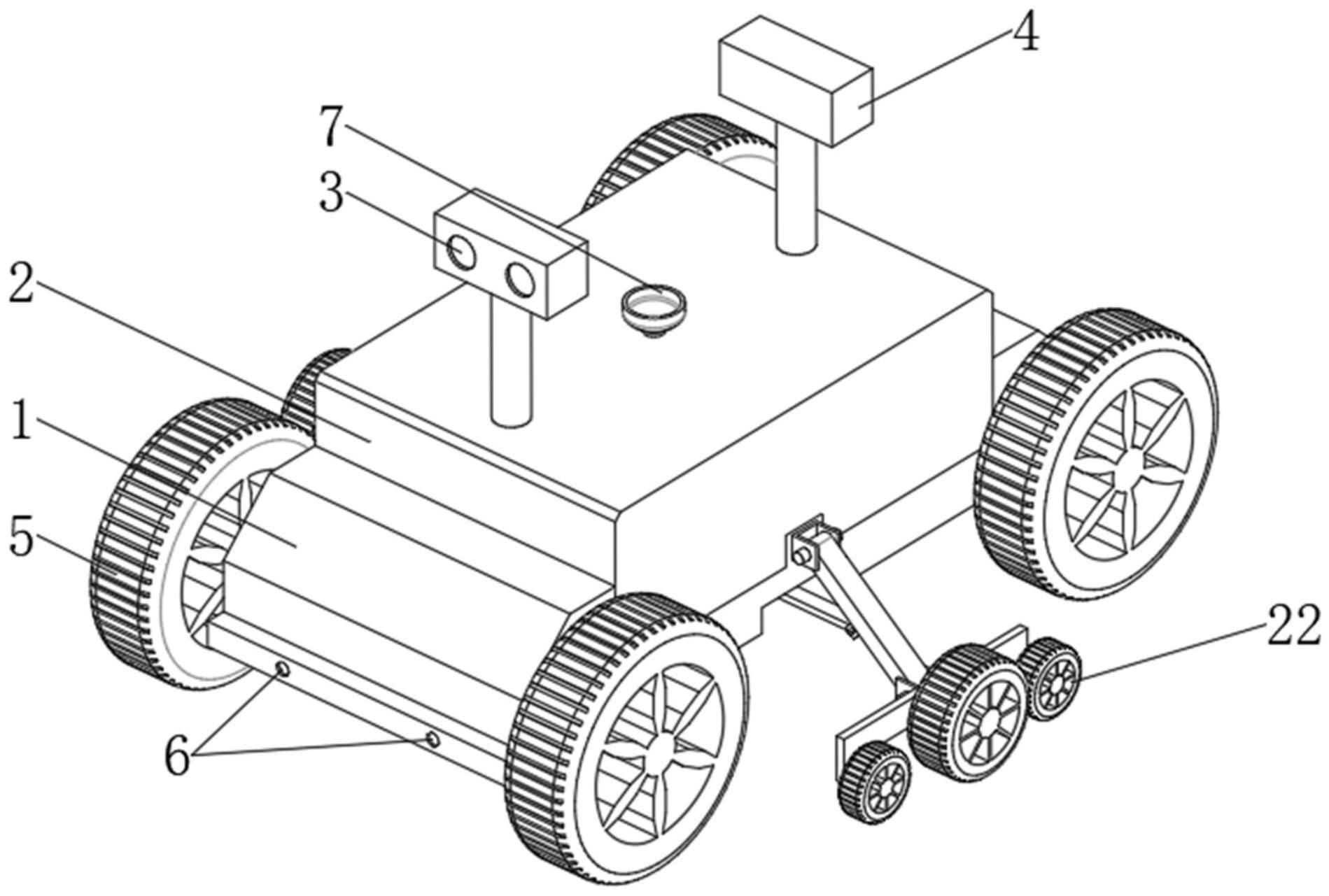
2、为了实现上述目的,本发明提供如下技术方案:一种发电厂自动避障巡检机器人,包括底盘,所述底盘顶端的中部固定安装有机座,所述底盘靠近前后两端的位置上均活动安装有主驱动轮,所述底盘顶端的中部固定安装有位于机座内部的增高架,所述增高架的左右两端均设有越障装置,所述底盘底端的中部开设有凹槽,所述底盘的底端固定安装有位于凹槽下方的清洁套,所述清洁套的内部设有第二激光避障传感器,所述增高架顶端的中部固定安装有位于机座内部的储气管,所述机座顶端的中部镶嵌安装有负压风机,所述第二激光避障传感器的顶端固定安装有活动板,所述活动板的顶端与越障装置之间相连接。
3、作为本发明进一步的技术方案,所述底盘顶端的前方固定安装有红外测温探头,所述底盘顶端的后方固定安装有广角摄像头组,所述底盘的前后两端均固定安装有第一激光避障传感器。
4、在装置的使用时,首先需将装置内置的蓄电池充满,保持装置电量充足,同时需规划好预定路径,确保机器人的正常行进,并将机器人放置在巡检场地上进行巡检,此时位于底盘顶端的红外测温探头可对待检测设备的工作温度进行检测,并进行远程回传,同时广角摄像头组可对巡检空间内的画面进行拍摄并进行远程回传,完成巡检工作。
5、作为本发明进一步的技术方案,所述储气管的顶端固定安装有暂存箱,所述负压风机的输出端固定连通有集风管,且集风管的底端贯穿机座的顶端且与暂存箱的内部相连通,所述储气管顶端的左侧固定连通有输气管,所述储气管顶端的右侧固定连通有导气管。
6、作为本发明进一步的技术方案,所述输气管的输入端和导气管的输出端均安装有单向阀,且阀门的方向分别为向内导通和向外截止,以及向外导通和向内截止。
7、作为本发明进一步的技术方案,所述储气管的内部活动套接有活塞板,所述活塞板的底端固定连接有延长杆,所述延长杆的底端贯穿增高架的底端且与活动板的顶端固定连接,所述活塞板的顶端固定连接有位于储气管内部的复位弹簧,所述复位弹簧的顶端与储气管内腔的顶端固定连接。
8、当第一激光避障传感器检测到较高的障碍物,底盘无法通过时,可通过开启负压风机即可将外部空气吸入至暂存箱的内部,此时暂存箱内部的空气即可通过输气管进入储气管的内部,此时空气即可进入储气管和活塞板之间,随着空气的持续进入,活塞板受到向下的压力,此时复位弹簧被压缩,活塞板以及延长杆随之下移,最终带动下方的活动板以及第二激光避障传感器下移。
9、作为本发明进一步的技术方案,所述越障装置包括第一固定座,所述第一固定座与增高架的左右两端固定连接,所述第一固定座远离增高架的一端通过转轴活动连接有支撑杆,所述支撑杆的另一端通过转轴活动连接有第二固定座。
10、作为本发明进一步的技术方案,所述第二固定座远离支撑杆的一端固定连接有安装架,所述安装架前端的中部通过传动轴连接有主越障轮,所述安装架前端的左右两侧通过传动轴连接有副越障轮,所述主越障轮的内部内置电机。
11、作为本发明进一步的技术方案,所述支撑杆内侧面的中部均固定安装有第三固定座,所述第三固定座远离支撑杆的一端通过转轴活动连接有连杆,所述连杆的另一端通过转轴活动连接有第四固定座,所述第四固定座位于活动板顶端的左右两侧且与活动板的顶端相连接。
12、作为本发明进一步的技术方案,所述主越障轮和副越障轮外侧面的底端处于同一水平面上,所述主越障轮和副越障轮与主驱动轮外侧面的底端始终处于同一水平面上。
13、当活动板和第二激光避障传感器向下方进行位移时,此时第四固定座随之向下进行位移,此时连杆随之发生向内侧的偏转,两个连杆从与活动板相互平行状态向与活动板相互垂直状态发生偏转,此时支撑杆随即受到向内侧的拉力,支撑杆朝底盘的方向进行靠近,此时即可带动支撑杆向内侧发生偏转,此时第二固定座随之相对底盘朝斜下方进行位移,此时由于主越障轮和副越障轮始终与地面之间进行接触,当支撑杆发生偏转时,此时左右两个主越障轮随之相对靠近,且底盘随之上升,主越障轮与副越障轮始终保持与地面之间进行接触,此时主驱动轮发生悬空,此时底盘与地面的离地间隙增加,通过驱动主越障轮旋转即可实现跨越障碍的操作。
14、通过在常规机器人的左右两端还设置有主越障轮以及副越障轮,使得机器人在正常行驶时,可通过主驱动轮的正常旋转来驱动主越障轮以及副越障轮的被动旋转实现行驶过程,而当障碍物过高时,则可通过第二激光避障传感器的下降来实现两个主越障轮的相互靠近并向斜下方进行运动的过程,最终实现底盘的升高,借此提高装置的离地间隙,并利用两个主越障轮以及四个副越障轮对装置进行支撑,并实现驱动,完成障碍物的跨越过程,避免传统装置固定式的底盘高度无法跨越障碍仅能进行绕行的问题,通行效率较高。
15、当装置正常行驶时,可通过第一激光避障传感器对较高的障碍物进行扫描,且可通过第二激光避障传感器对低于底盘高度的障碍物进行扫描,确保障碍物可以顺利通过底盘的底端避免托底,同时进行越障操作时,此时由于底盘的整体高度升高,即离地间隙增加,此时活动板和第二激光避障传感器随之下降,此时第二激光避障传感器的高度随之相对底盘发生下降,亦可继续对低于底盘高度的障碍物进行扫描,确保越障时不会发生托底。
16、通过设置第一激光避障传感器和第二激光避障传感器,使用二者的协同工作来对不同高度的障碍物进行扫描,确保机器人不会发生与障碍物的碰撞以及托底现象,同时利用了越障变形时第二激光避障传感器的下降,实现底盘底盘高度增高的同时还可对较小障碍物进行扫描,确保机器人可以顺利通过障碍物,整个避障过程安全阈值较高,可有效防止机器人的损坏,提高使用寿命。
17、作为本发明进一步的技术方案,所述导气管远离储气管的一端贯穿底盘的底端且固定连通有位于第二激光避障传感器侧面的喷头,所述第二激光避障传感器的直径与清洁套的内径相同。
18、当机器人完成巡检工作后,可通过关闭输气管的阀门并打开导气管的阀门,此时位于储气管内部的空气可通过导气管排出,此时储气管内部的空气量减少,活塞板顶端所承受的压力减小,复位弹簧随之复位并带动活塞板上移,此时延长杆随之上移,最终带动活动板以及第二激光避障传感器上移,当第二激光避障传感器完全位移至清洁套内部时,由于会与清洁套的内侧面发生摩擦,此时即可对第二激光避障传感器的表面进行清洁,同时此时主越障轮和副越障轮向斜上方发生偏转,不与地面之间进行接触,提高行驶速度,且导气管导出的空气可通过喷头喷出,并作用于上升途中的第二激光避障传感器对其表面的浮尘进行清洁,完成自主收纳和自主清洁过程。
19、本发明的有益效果如下:
20、1、本发明通过在常规机器人的左右两端还设置有主越障轮以及副越障轮,使得机器人在正常行驶时,可通过主驱动轮的正常旋转来驱动主越障轮以及副越障轮的被动旋转实现行驶过程,而当障碍物过高时,则可通过第二激光避障传感器的下降来实现两个主越障轮的相互靠近并向斜下方进行运动的过程,最终实现底盘的升高,借此提高装置的离地间隙,并利用两个主越障轮以及四个副越障轮对装置进行支撑,并实现驱动,完成障碍物的跨越过程,避免传统装置固定式的底盘高度无法跨越障碍仅能进行绕行的问题,通行效率较高。
21、2、本发明通过设置第一激光避障传感器和第二激光避障传感器,使用二者的协同工作来对不同高度的障碍物进行扫描,确保机器人不会发生与障碍物的碰撞以及托底现象,同时利用了越障变形时第二激光避障传感器的下降,实现底盘底盘高度增高的同时还可对较小障碍物进行扫描,确保机器人可以顺利通过障碍物,整个避障过程安全阈值较高,可有效防止机器人的损坏,提高使用寿命。
22、3、本发明通过将用于越障变形时所使用的空气进行释放,可快速完成装置的自动复位和收纳,并在收纳途中可自动对第二激光避障传感器进行自动摩擦清洁,同时释放的空气可被再次利用,利用其高速流动性对第二激光避障传感器表面的浮尘进行清洁,整个收纳和清洁过程自动化完成,可有效减少巡检人员针对机器人的维护次数,提高装置的实用性。
- 还没有人留言评论。精彩留言会获得点赞!