一种积灰工况下光伏组件最大功率点追踪控制方法
1.本发明涉及光伏组件输出功率控制,具体为一种积灰工况下光伏组件最大功率点追踪控制方法。
背景技术:
2.现代社会对能源的需求越来越大,而传统化石能源的短缺和造成的环境问题,迫使人们将目光转向新能源领域。太阳能因其清洁和可再生特性,被人们广泛关注,而光伏发电是太阳能利用的主要形式。影响光伏发电效率的主要因素是光照强度和工作温度,而光伏面板上积灰积累将会产生遮光效应和温度效应,遮光效应将降低光伏组件吸收的光照强度,从而导致光伏发电效率下降和光伏输出功率波动加剧。悬浮在大气中的灰尘,当附着在光伏面板时会形成积灰。积灰对光伏组件影响可以归结为三个方面:一是遮光效应,积灰通过吸附、反射的作用减小光伏组件吸收的太阳光,使得光伏组件的透光率下降,降低光伏组件输出功率;二是温度效应,在光伏面板上的灰尘对光伏面板的传热形式也产生影响,积灰的覆盖最终降低了光伏组件的温度,且积灰密度越大,光伏组件温度越低,且不同积灰密度组间的温差随太阳辐射强度的减弱而减小;三是腐蚀效应,当积灰长时间附着在光伏面板时,光伏面板将被腐蚀,从而在光伏面板上形成坑坑洼洼的表面,这将增加光伏表面对太阳光的漫反射,降低光伏组件的透光率,使得光伏组件吸收的太阳辐射量减小。在上述多重效应的相互作用下,积灰严重影响光伏组件的输出功率,导致光伏组件最大输出功率点降低。当光伏组件运行在高污染环境,必须要考虑积灰对光伏组件发电效率影响和对最大功率点追踪效果的影响。图1为光伏组件在积灰工况p-u输出特性曲线,其图中r为积灰密度,p为光伏组件的输出功率,u为光伏组件的输出电压。
3.通常将大量的光伏电池单元通过串联和并联的方式,采用一定的工艺封装为一个整体,构成能提供一定容量直流电能的发电单元,称为光伏组件。
4.光伏电池有着复杂的非线性输出特性,光伏阵列的输出电压和电流在很大程度上受日照强度和温度的影响,当光照强度、温度等自然条件改变时,光伏阵列的输出特性和输出功率也会发生改变,系统工作点因此而变化,若不及时调整系统工作点,必然会导致系统效率的降低,即使在同一光照强度和温度下,由于负载的不同,阵列输出功率也是不同的,如果将其直接与负载相连,就不能保证阵列工作在最大功率点上,从而造成功率的损失。因此,对于光伏发电系统来说,应当寻找光伏电池的最优工作状态,以最大限度地将光能转化为电能。根据电路理论,当光伏电池的输出阻抗和负载阻抗相等时,光伏电池能输出最大的功率。由此可见,光伏电池的mppt(maximum power point tracking,简称mppt)过程实际上就是使光伏电池输出阻抗和负载阻抗相匹配的过程。在实际应用中,光伏电池的输出阻抗受环境因素的影响,需要通过控制方法实现对负载阻抗的实时调节,并使其跟踪光伏电池的输出阻抗,以实现光伏电池的mppt控制光伏电池的最大功率点的追踪控制是光伏发电系统涉及的主要技术之一。
5.扰动观测法(perturbation and observation,p&o)是最常用的一种光伏阵列最
大功率点追踪方法之一。基本原理是:扰动光伏电池输出电压,然后观察其输出功率的变化,根据输出功率的变化趋势决定下一次扰动方向,如此反复,直到光伏电池达到最大功率点,其流程图如图2所示。在实际应用中,可以通过调节mppt控制器的占空比来调节光伏组件输出电压。
6.扰动观测法步长大小决定其的追踪速度和震荡幅度大小,其大小与光伏组件输出功率的曲线的斜率和在最大功率点出的弧度决定。积灰密度的增加导致光伏组件输出功率曲线斜率下降,在输出功率最大点附近曲线更加平缓,从而使得原来步长不是当前积灰密度下的最适合步长,从而增加追踪时间。扰动观测法因为一开始就固定步长的大小,使用固定步长进行追踪最大功率点,不能适应积灰对光伏组件的影响。
7.积灰密度对光伏组件输出电流的影响因子α:
[0008][0009]
由于影响因子的大小决定积灰密度对光伏组件输出电流的影响程度,影响因子越大,积灰对光伏组件输出电流影响越大,光伏组件发电效率降低的程度越大。由于积灰主要是影响光伏组件的输出电流,则可以通过影响因子近似去衡量积灰密度对光伏组件输出功率的影响。
技术实现要素:
[0010]
本发明解决现有扰动观测法采用固定追踪步长(δs)无法适应积灰密度增加导致追踪速度变慢的问题,提供一种光伏组件在积灰工况下的最大功率点追踪控制方法。
[0011]
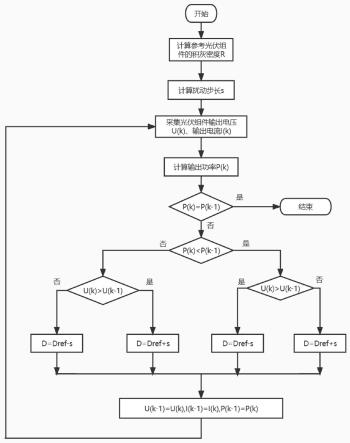
本发明是采用如下技术方案实现的:一种积灰工况下光伏组件最大功率点追踪控制方法,由下列步骤实现:
[0012]
(1)收集参考的光伏组件表面的积灰,计算出其积灰密度r;
[0013]
(2)由于积灰对光伏组件输出电流的影响是近似线性的,通过影响因子衡量积灰对步长的影响,随着积灰密度增加,积灰对光伏组件输出性能影响程度逐渐减弱,通过对积灰密度进行取对数来近似表示积灰累积对光伏组件输出性能影响逐渐减弱效果,计算扰动观测法的扰动步长s:
[0014]
s=s0+s0·
α
·
ln(r+1)
[0015]
其中s0为基本步长,α为影响因子一般取值在0.5~0.7,r为积灰密度;
[0016]
(3)采集k时刻的光伏组件输出电压u(k)、输出电流i(k);
[0017]
(4)计算在时刻k光伏组件的输出功率p(k)=u(k)*i(k),并与k-1时刻(即上一个采样时刻)的输出功率p(k-1)、输出电压u(k-1)、输出电流i(k-1)进行比较,dp(k)=p(k)-p(k-1),du(k)=u(k)-u(k-1),di(k)=i(k)-i(k-1);
[0018]
(5)当dp(k)/du(k)>0,则光伏电池的工作点在最大功率点左侧;
[0019]
当u(k)>u(k-1)时,则在原方向加扰动步长s=s0+s0·
α
·
ln(r+1);当u(k)<u(k-1)时,则在原来相反的方向加扰动步长
[0020]
s=s0+s0·
α
·
ln(r+1);
[0021]
(6)当dp(k)/du(k)<0,则光伏电池的工作点在最大功率点右侧;
[0022]
当u(k)>u(k-1)时,则在原相反方向加扰动步长s=s0+s0·
α
·
ln(r+1);
[0023]
当u(k)<u(k-1)时,则在原来的方向加扰动步长s=s0+s0·
α
·
ln(r+1);
[0024]
(7)当dp(k)/du(k)=0,则光伏组件工作在最大功率点;
[0025]
(8)u(k-1)=u(k);i(k-1)=i(k);p(k-1)=p(k);
[0026]
(9)返回(从步骤3重复)。
[0027]
在实际的积灰工况下的光伏发电系统中,通过进一步的研究光伏组件在不同积灰密度下的p-u特性曲线可以看出随着积灰密度增加,光伏组件输出功率将会明显的下降,曲线的斜率降低,并且曲线在最大功率点附近弧度增大;则说明在不同积灰密度下,扰动观测法可以采用不同大小的步长进行追踪,由于积灰密度会降低输出功率曲线的斜率,则可以加大扰动观测法的扰动量,由于在最大功率点附近,输出功率曲线的弧度更大也意味着,增大步长将不会导致追踪结果的震荡加大。
[0028]
本发明在扰动观测法的基础上,通过将积灰密度和扰动观测法的步长结合在一起,使得固定步长扰动观测法变成变步长扰动观测法,提高扰动观测法的适应能力,解决在积灰工况下扰动观测法追踪光伏组件最大功率点的追踪速度变慢,提高了追踪速度和光伏组件的发电效率。本发明不仅可以提高扰动观测法在积灰工况下的追踪光伏组件最大功率点的速度,而且控制策略简单,适应能力强,成本低,可以被广泛运用在光伏组件最大功率点的追踪,具有广泛的应用价值。
附图说明
[0029]
图1为光伏组件在积灰工况下的p-u输出特性曲线;
[0030]
图2为现有扰动观测法的控制流程图;
[0031]
图3为本发明所述积灰工况下光伏组件最大功率点追踪控制方法的流程图;
[0032]
图4为本发明实例提供的传统扰动观测法步长为-0.001时的仿真波形;
[0033]
图5为本发明实例提供的采用本发明控制策略下的扰动观测法的仿真波形。
具体实施方式
[0034]
为了使本发明的目的、技术方案及优点更加清楚明白,以下结合实施例,对本发明进行进一步详细说明。
[0035]
本发明是采用如下技术方案实现的:一种积灰工况下光伏组件最大功率点追踪控制方法,由下列步骤实现:
[0036]
(1)收集参考的光伏组件表面的积灰,计算出其积灰密度r;
[0037]
(2)由于积灰对光伏组件输出电流的影响是近似线性的,通过影响因子衡量积灰对步长的影响,随着积灰密度增加,积灰对光伏组件输出性能影响程度逐渐减弱,通过对积灰密度进行取对数来近似表示积灰累积对光伏组件输出性能影响逐渐减弱效果,计算扰动观测法的步长s公式:
[0038]
s=s0+s0·
α
·
ln(r+1)
[0039]
其中s0为基本步长,α为影响因子一般取值在0.5~0.7,r为积灰密度;
[0040]
(2)采集k时刻的光伏组件输出电压u(k)、输出电流i(k);
[0041]
(3)计算在时刻k光伏组件的输出功率p(k)=u(k)*i(k),并与k-1时刻(即上一个采样时刻)的输出功率p(k-1)、输出电压u(k-1)、输出电流i(k-1)进行比较,dp(k)=p(k)-p
(k-1),du(k)=u(k)-u(k-1),di(k)=i(k)-i(k-1);
[0042]
(4)当dp(k)/du(k)>0,则光伏电池的工作点在最大功率点左侧;
[0043]
当u(k)>u(k-1)时,则在原方向加扰动步长s=s0+s0·
α
·
ln(r+1);当u(k)<u(k-1)时,则在原来相反的方向加扰动步长
[0044]
s=s0+s0·
α
·
ln(r+1);
[0045]
(5)当dp(k)/du(k)<0,则光伏电池的工作点在最大功率点右侧;
[0046]
当u(k)>u(k-1)时,则在原相反方向加扰动步长s=s0+s0·
α
·
ln(r+1);
[0047]
当u(k)<u(k-1)时,则在原来的方向加扰动步长s=s0+s0·
α
·
ln(r+1),
[0048]
(7)当dp(k)/du(k)=0,则光伏组件工作在最大功率点;
[0049]
(8)u(k-1)=u(k);i(k-1)=i(k);p(k-1)=p(k);
[0050]
(9)返回(从步骤3重复)。
[0051]
在matlab/simulink环境下,搭建光伏组件boost电路的mppt控制模型。(1)设置扰动观测法控制器的基本参数,起始占空比为dref为1,基本步长s0为-0.001,α为0.7,积灰密度r假设为10g/m2;其中,在标准状况下光照强度s=1000w/m2,工作温度t=25℃,光伏组件的基本参数u
oc
=36.3v;um=29v;i
sc
=7.84a;im=7.35a。采用传统扰动观察法将步长设置为-0.001时的光伏组件功率输出仿真波形如图4所示,采用本发明控制策略下的扰动观测法的仿真波形如图5所示。
[0052]
因此可以看出本发明在积灰工况下扰动观测法比传统的扰动观测法具有很大的优越性,既可以快速的追踪到最大功率点,同时在最大功率点附件波动很小。总体来说,本发明解决了积灰工况下传统扰动观测法追踪速度变慢的问题,而且控制策略简单,适应能力强,成本低,可以被广泛运用在光伏组件最大功率点的追踪,具有广泛的应用价值。
[0053]
以上所述,并非对本发明作任何形式上的限制,虽然本发明已通过上述实施例揭示,然而并非用以限定本发明,任何熟悉本专业的技术人员,在不脱离本发明技术方案范围内,当可利用上述揭示的技术内容作出些变动或修饰为等同变化的等效实施例,但凡是未脱离本发明技术方案的内容,依据本发明的技术实质对以上实施例所作的任何简单修改、等同变化与修饰,均仍属于本发明技术方案的范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1