一种基于多传感融合跨越凹凸地形的四足机器人控制方法
本发明涉及四足机器人,尤其涉及一种基于多传感融合跨越凹凸地形的四足机器人控制方法。
背景技术:
1、随着科技的发展,四足机器人在实际生活中有了更多的应用。四足机器人相比轮式、履带式机器人具有更好的机动能力,对不规则地形有更好的通过性。采用传统的中枢模式发生器(cpg),可以使四足机器人具有良好的节律性运动。cpg控制机器人在平坦地形下运动具有较好的稳定性和通过性,但是传统的开环cpg网络缺乏对机器人自身调整,在不规则地形,尤其在凹凸地形下,机器人与环境的交互能力差,容易产生打滑、卡死、猛烈震动甚至侧翻等危险。
2、因此,将多种传感器信息融合,根据传感器信息判断地形类型,以及获取四足机器人自身运动状态,可以提高机器人与环境的交互能力和动态调节能力。
3、本发明方法在cpg控制策略中加入多条件判断和多个反馈项来调整四足机器人关节角与运动姿态,对凹凸地形进行适应,可以有效减少机器人在凹凸地形下的打滑、卡死、猛烈抖动等现象,具有更好的控制性能,帮助机器人适应不规则的地形。
技术实现思路
1、本发明为了解决现有四足机器人在cpg控制方法下对凹凸地形适应性差,与环境交互能力不够的问题,提供了一种基于多传感融合跨越凹凸地形的四足机器人控制方法。
2、本发明提供一种基于多传感融合跨越凹凸地形的四足机器人控制方法,包括了:
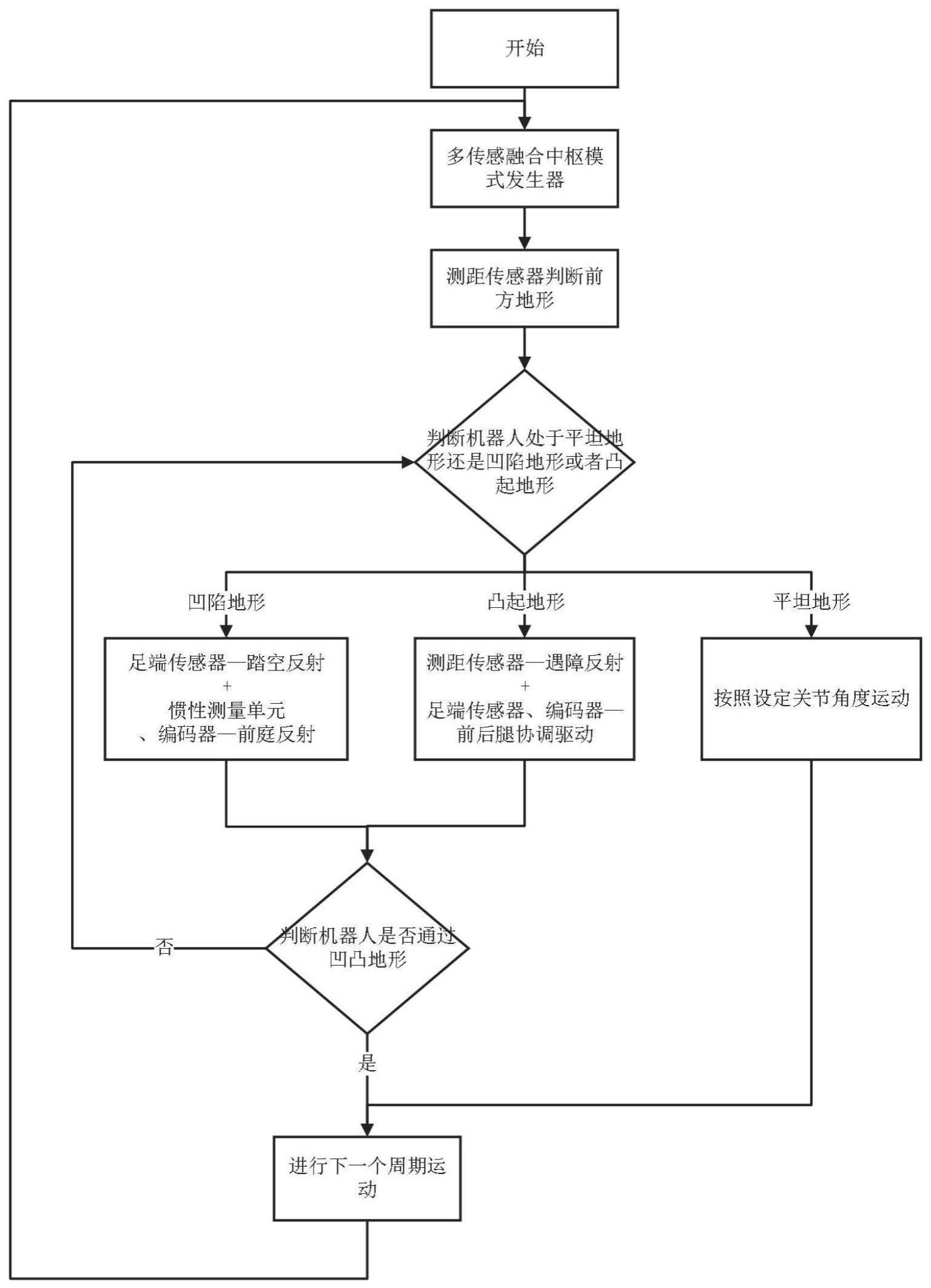
3、s1:首先四足机器人采用多传感融合中枢模式发生器(multi-sensorinformation fusion cpg)输出的节律信号来规划运动步态,再通过三个测距传感器和惯性测量单元,根据四足机器人自身尺寸以及测距传感器获取到的机器人躯体距离正下方地面以及斜前方离地面距离值,对距离值进行判断处理来分辨四足机器人前方地形类型,包括凹陷地形、凸起地形或者平坦类型;
4、s2:通过s1中判断为凹陷地形时,四足机器人同时启动前庭反射和踏空反射算法,保证四足机器人足端落地瞬间不会对机身造成很大波动,以及落地后完成身体姿态调整,保证机身不会有太大的倾斜,防止前后倾角过大造成的重心过度偏移和四条腿的受力不均匀。
5、s3:通过s1中判断为凸起地形时,四足机器人对凸起地形高度范围进行判断,若凸起高度小于四足机器人抬腿高度,则四足机器人可以直接跨越,只需根据惯性测量单元进行前庭反馈进行姿态调整。若凸起高度大于四足机器人抬腿高度,则四足机器人需要启动遇障反射和后腿驱动反射来帮助完成前腿的跨越,在前腿跨越凸起地形后,进行姿态调整,降低前躯体重心,再进行后腿跨越,后腿跨越启动遇障反射和和前腿进行协调驱动反射。从而跨越凸起地形。
6、s4:通过s1中判断为平坦地形时,四足机器人按中枢模式发生器(cpg)输出的节律信号规划的步态进行行走。
7、根据本发明提供的一种基于多传感融合跨越凹凸地形的四足机器人控制方法,所述的四足机器人根据实际地形融合多传感器信息来对机器人进行反馈调节,反馈量采用与中枢模式发生器(cpg)输出信号进行相加的方式进行实际运动调节,其数学模型如下:
8、
9、式中,xi、yi为实际髋关节、膝关节角度输入量,xhi、yki为cpg振荡器输出的髋关节和膝关节角度信号量,offsethi、offsetki为前庭反射髋关节、膝关节的反馈值,feedbackhi、feedbackki为机器人踏空反射或者遇障反射的髋关节与膝关节的反馈量,用来根据地形变化控制与外界的交互,从而实现动态反馈以适应地形。
10、根据本发明提供的一种基于多传感融合跨越凹凸地形的四足机器人控制方法,所述三个测距传感分别安装在躯体头部、机器人前躯体底部与后躯体底部,底部测距传感器用于测量机器人躯体距离地面的高度,头部距离传感器用于测量机器人斜前方设定角度与机器人的距离。
11、根据本发明提供的一种基于多传感融合跨越凹凸地形的四足机器人控制方法,所述的测距传感器包含但不限于超声波传感器、红外传感器、激光传感器等测距传感器。
12、根据本发明提供的一种基于多传感融合跨越凹凸地形的四足机器人控制方法,所述的距离处理计算方法为,
13、
14、其中ds2为四足机器人底部测距传感器所获取到的距离值,l为四足机器人的单腿长度,θ表示四足机器人关节初始角,threshold2为根据实际情况设定高度阈值,max_height为根据机器人自身尺寸设定的最大高度落差,此处所定义的凹陷和凸起地形在机器人跨越能力范围之内。
15、该计算方法中,将传感器所获取得到的距离值与机器人躯体底部到足底的距离进行对比,若传感器获取到的距离值大于机器人躯体底部到足底的距离,且差值大于设定阈值时,判定为凹陷地形;同理,若传感器获取到的距离值小于机器人躯体底部到足底的距离,且差值小于设定阈值时,判定凸起地形。当传感器获取到的距离值与机器人躯体底部到足底的距离值差值在设定阈值范围内时,判定为平坦地形。设定阈值的大小以机器人在平坦地形下的波动范围作为参考,防止机器人误判地形。
16、根据本发明提供的一种基于多传感融合跨越凹凸地形的四足机器人控制方法,对所述距离处理方法进一步判断,
17、
18、当判断ds2-2lcosθ≥max_height时,则机器人判断地形为过深的凹陷地形,无法跨越的地形,需改换路线。当判断ds2-2lcosθ≤-max_height时,则机器人判断地形为过高凸起地形,为机器人无法跨越的地形,需改换线路。
19、根据本发明提供的一种基于多传感融合跨越凹凸地形的四足机器人控制方法,当判断地形为凹陷地形时,四足机器人同时启动前庭反射与踏空反射,从而可以同时进行姿态调节与快速落足的运动,帮助减少踏空带来的剧烈振动与躯体不平衡程度。
20、根据本发明提供的一种基于多传感融合跨越凹凸地形的四足机器人控制方法,四足机器人在凹陷地形下启动的前庭反射是模仿生物运动中维持身体平衡的一种方式,所述前庭反射应用于凹凸地形下的四足机器人动态姿态调整。其控制方法为:
21、前庭反射计算方法
22、
23、
24、其中offseth为机器人髋关节平衡位置偏移量,offsetk为四足机器人膝关节平衡位置偏移量。α为地形坡度。由于躯体姿态角与坡度近似成线性关系,可以得到姿态角平衡系数h1,再将姿态角映射到关节角度变化,得出关节角平衡系数h2。
25、根据本发明提供的一种基于多传感融合跨越凹凸地形的四足机器人控制方法,四足机器人在凹陷地形下启动的踏空反射。根据ds2(2号)测距传感器检测到机器人前方地形为凹陷地形时,结合足端压力传感器和编码器,判断当机器人进入支撑相位时,足端是否触地。若未触地则启动踏空反射,防止机器人因踏空产生的剧烈震动以及机身躯体的不平衡。
26、根据本发明提供的一种基于多传感融合跨越凹凸地形的四足机器人控制方法,所述的结合足端压力传感器和编码器的判断方法为,当编码器检测到四足机器人髋关节和膝关节到达进入支撑相位的角度时,同时获取足端压力传感器的反馈值。若此时足端压力传感器反馈为未触地,标记为踏空,若反馈为已触地,标记为正常落足。
27、其判断方式可以表示为:
28、
29、其中i表示第i条腿,xhi表示第i条腿的髋关节角度值,yki表示第i条腿的膝关节角度值,θsth表示髋关节相位切换的关节角度,θstk表示膝关节相位切换的关节角度,δθh表示设定髋关节变动范围阈值,δθk表示设定膝关节变动范围阈值,touchsenori表示第i条腿足端压力传感器的反馈值,值为0表示为未触地,值为1表示为触地。
30、根据本发明提供的一种基于多传感融合跨越凹凸地形的四足机器人控制方法,所述的踏空反射的控制方法为在机器人摆动腿进入支撑相但未触地的时刻,给机器人腿部的膝关节和髋关节一个反馈值,使其快速往下伸,直至触地,同时踏空瞬间实时降低机体重心防止高度落差较大导致机体倾覆。本发明中采用踏空反射的数学模型为:
31、
32、式中,feedbackhi、feedbackki为机器人踏空反射的髋关节与膝关节反馈量,n为变化幅值调节系数,xhi为第i条腿的髋关节角度值,xs=θsth-δθh,xs为髋关节变动范围下限值。
33、根据本发明提供的一种基于多传感融合跨越凹凸地形的四足机器人控制方法,当判断地形为凸起地形高度小于目前抬腿高度时,可直接跨越凸起地形,只需在跨越过程中进行前庭反射的姿态调整。
34、根据本发明提供的一种基于多传感融合跨越凹凸地形的四足机器人控制方法,当判断地形为凸起地形高度大于目前抬腿高度时,四足机器人会同时启动遇障反射和后腿驱动。
35、根据本发明提供的一种基于多传感融合跨越凹凸地形的四足机器人控制方法,当判断地形为凸起地形高度大于目前抬腿高度时,四足机器人启动遇障反射的反射动作为:
36、步骤1:先将前腿髋关节后摆,角度减小至a1,同时膝关节上摆,角度增大至b1,完成收缩抬高腿部动作;
37、步骤2:将前腿髋关节前摆,角度增大至a2,膝关节保持不变,完成越障动作;
38、步骤3:前腿髋关节角度保持不变,膝关节下摆,角度减小至b3,完成落足动作;
39、步骤4:髋关节、膝关节继续摆动至cpg所规划的角度。
40、其中,a1、a2、b1、b3值由机器人自身尺寸以及凸起地形高度决定。
41、根据本发明提供的一种基于多传感融合跨越凹凸地形的四足机器人控制方法,四足机器人所规划的遇障反射实现方式,结合cpg所规划的角度,可以给出如下计算方式:
42、
43、式中,ah为髋关节遇障反射调节系数,ak为膝关节遇障反射调节系数,xmax为髋关节最大转动幅值,xhi为cpg输出髋关节转角,yki为cpg输出膝关节转角。ah、ak为可调参数,用来控制反馈调节的变化幅度,本发明中ah=0.3,ak=0.3。
44、根据本发明提供的一种基于多传感融合跨越凹凸地形的四足机器人控制方法,启动遇障反射的条件为测距传感器判断前方为凸起地形。前腿部在足端压力传感器判断为进入摆动相时进行遇障反射。
45、根据本发明提供的一种基于多传感融合跨越凹凸地形的四足机器人控制方法,当判断地形为凸起地形高度大于目前抬腿高度时,四足机器人启动的后腿驱动反射方法为在前腿进行遇障反射的同时,后腿收缩,使机器人躯体保持为前高后低。在机器人前腿完成落足动作时,后腿快速恢复至原先姿态,使机器人产生一个向前的推力,从而帮助机器人稳定地越过凸起地形。
46、根据本发明提供的一种基于多传感融合跨越凹凸地形的四足机器人控制方法,当判断地形为凸起地形高度大于目前抬腿高度并且前腿跨越凸起地形后,进行姿态调整,并且后腿启动遇障反射和前腿协调驱动。
47、根据本发明提供的一种基于多传感融合跨越凹凸地形的四足机器人控制方法,后腿的遇障反射控制方式与前腿一致。
48、根据本发明提供的一种基于多传感融合跨越凹凸地形的四足机器人控制方法,前腿协调驱动方式为,前腿收缩,使机器人前躯体姿态降低,同时保持原先向前运动的控制方式,使后躯体可以被前驱体带动向前,减少后腿承重。可以帮助后腿跨越凸起地形。
49、根据本发明提供的一种基于多传感融合跨越凹凸地形的四足机器人控制方法,后腿部在足端压力传感器判断为进入摆动相时进行遇障反射。
50、根据本发明提供的一种基于多传感融合跨越凹凸地形的四足机器人控制方法,当判断地形为平坦地形时,四足机器人按原先cpg设定运动规划进行前行。
51、本发明的有益效果为:
52、1)本发明采用的测距传感器判断当前地形可以增强机器人对地形的感知,从而提前做好跨越凹凸地形的准备,具有较好的感知能力。
53、2)本发明融合测距传感器、足端压力传感器、惯性测量单元以及编码器为四足机器人跨越凹凸地形提供了外界地形信息以及自身运动信息,自身运动信息包括机器人当前的姿态角,足端触地情况,关节角度等,为机器人进行各种反射运动以及姿态调整提供了有力的帮助。
54、3)本发明在凹陷地形时同时启动的前庭反馈与踏空反射,四足机器人可以在腿部快速下伸的时候同时进行姿态调整,提升了四足机器人的稳定性和通过性以及自主调整能力,使之在变化的环境下更加鲁棒。
55、4)本发明在凸起地形时同时启动的遇障反射与后腿协调驱动,帮助机器人快速踏上凸起地形,减少了时间和能量的损耗。后腿驱动的方式可以帮助机器人在力矩较小时也可以跨越凸起地形,使机器人对环境具有更好的适应性。
56、5)本发明在凸起地形时同时启动的前庭反射与前腿协调驱动,帮助机器人后腿可以快速跨越凸起地形,通过降低前驱体的重心,将重心向前移动,帮助后腿更好地跨越凸起地形。
57、6)本发明中,机器人通过各个传感器信息将多种反射方式结合,使之在跨越凹凸地形时具有更好的稳定性和鲁棒性。
- 还没有人留言评论。精彩留言会获得点赞!