一种地铁隧道自动冲洗方法、设备及存储介质与流程
本发明涉及地铁隧道运营,尤其是涉及一种地铁隧道自动冲洗方法、设备及存储介质。
背景技术:
1、地铁在不断运营的过程中,会在隧道内逐步累积大量的粉尘、碎屑等,随着列车的运行所带来的活塞风,会使上述空气污染物卷起,并弥漫在整个隧道内部,不但影响到列车运营的舒适性,也会随着隧道风机的使用进入车站内,严重影响列车内和车站内的空气质量。因此,地铁运营单位会定期进行地铁隧道的清洗。
2、现有城市轨道交通线路中,无论是在有人驾驶运营线路还是无人驾驶运营线路,地铁隧道清洗目前主要依靠地铁运营人员人工驾驶地铁隧道冲洗列车,在夜间人工进行隧道冲洗。作业过程如列车加水、列车驾驶并到达作业区域、隧道冲洗、退出作业、二次作业等,均需人工进行作业。这种人工作业方式工作量大且作业复杂,自动化水平低,运营效率低、耗费时间长、人力成本高。
技术实现思路
1、本发明的目的就是为了克服上述现有技术存在的缺陷而提供一种地铁隧道自动冲洗方法、设备及存储介质。
2、本发明的目的可以通过以下技术方案来实现:
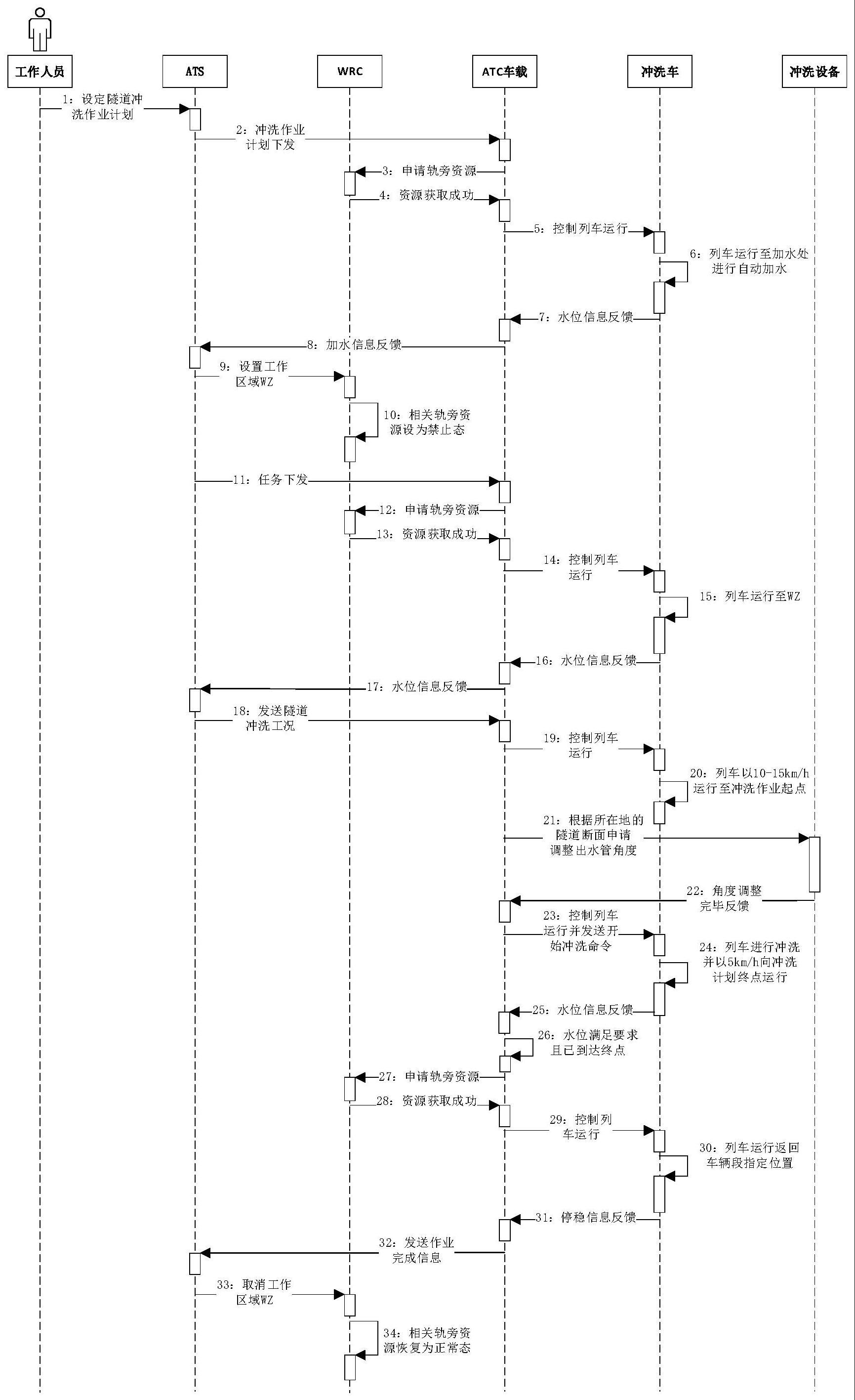
3、根据本发明的第一方面,提供一种地铁隧道自动冲洗方法,基于信号自主运行系统tacs实现,所述信号自主运行系统tacs包括轨旁资源管理器wrc,ats子系统和atc车载控制器,所述atc车载控制器安装在地铁隧道冲洗列车上;方法包括:
4、step1:ats子系统获取隧道冲洗作业计划并发送至atc车载控制器;
5、step2:atc车载控制器根据隧道冲洗作业计划控制冲洗列车加水;
6、step3:ats子系统设置冲洗列车的工作区域wz,所述工作区域wz覆盖并大于隧道冲洗作业计划中的隧道冲洗范围,由轨旁资源管理器wrc将所述工作区域wz的轨旁资源设置为禁止态;
7、step4:到达隧道冲洗作业计划的计划开始时间时,ats子系统向atc车载控制器发送进入工作区域wz的任务,atc车载控制器向轨旁资源管理器wrc申请进入工作区域wz的轨旁资源,资源申请成功后atc车载控制器控制冲洗列车进入工作区域wz并到达隧道冲洗范围的起点;
8、step5:atc车载控制器控制冲洗列车在隧道冲洗范围内运行并进行隧道冲洗;
9、step6:完成冲洗作业后,atc车载控制器向ats子系统反馈作业完成信息,由轨旁资源管理器wrc将所述工作区域wz的轨旁资源恢复为正常态。
10、进一步地,所述步骤step1中,工作人员在ats子系统设定隧道冲洗作业计划,所述隧道冲洗作业计划包括:冲洗列车加水时间、冲洗作业的计划起止时间、隧道冲洗范围、隧道冲洗方式、在一次作业未完成后是否二次加水并继续冲洗作业。
11、进一步地,步骤step2具体为:atc车载控制器控制冲洗列车在隧道冲洗作业计划规定的冲洗列车加水时间内运行至加水处自动加水,在规定的冲洗列车加水时间内,若加水完毕,则向ats子系统反馈加水成功完成,若加水未成功或加水未达到所要求的水位,则向ats子系统反馈加水失败,并在ats子系统工作站报警,ats子系统取消此次作业并提示工作人员人工介入。
12、进一步地,步骤step4中,atc车载控制器控制冲洗列车进入工作区域wz并到达隧道冲洗范围的起点之前,还包括:
13、atc车载控制器控制冲洗列车运行至工作区域wz的边缘,并向ats子系统反馈冲洗列车的水位信息;
14、若冲洗列车的水位信息满足预设置的冲洗作业最低水位,ats子系统发送隧道冲洗工况给atc车载控制器,atc车载控制器控制冲洗列车进入工作区域wz并到达隧道冲洗范围的起点,否则,ats子系统发出列车水位过低报警,并提醒工作人员介入。
15、进一步地,采用主动检测的方式确定冲洗列出的实时位置,即:冲洗列车通过读取位于轨道上的信标或根据自身的测速测距设备来确定冲洗列车的实时位置。
16、进一步地,隧道冲洗方式包括:顶部冲洗、侧面冲洗、下部冲洗中的任一种或多种。
17、进一步地,步骤step5中还包括:
18、获取冲洗列车的实时位置,根据冲洗列车的位置获取当前隧道的断面形状,根据隧道的断面形状调整冲洗列车上出水管的角度。
19、进一步地,隧道的断面形状包括但不限于圆形、马蹄形、矩形。
20、进一步地,步骤step5中还包括:
21、在冲洗的过程中,atc车载控制器实时向ats子系统反馈冲洗列车的水位信息;
22、当冲洗列车运行至隧道冲洗范围的终点,水位仍大于等于预设置的冲洗作业最低水位,表明本次冲洗作业已完成;
23、当冲洗列车运行至隧道冲洗范围的终点前,水位已低于预设置的冲洗作业最低水位,则根据隧道冲洗作业计划中的要求:“在一次作业未完成后是否二次加水并继续冲洗作业”的预设进行随后的作业。
24、进一步地,若预设为不进行二次加水冲洗,则本次冲洗作业已完成;若预设为进行二次加水冲洗,则atc车载控制器向轨旁资源管理器wrc申请返回车辆段的轨旁资源,控制冲洗列车加水,并在加水结束后返回上一次冲洗停止地点继续进行冲洗作业,直至完成冲洗作业。
25、根据本发明的第二方面,提供一种电子设备,包括存储器和处理器,所述存储器上存储有计算机程序,所述处理器执行所述程序时实现如本发明第一方面所述的方法。
26、根据本发明的第三方面,提供一种计算机可读存储介质,其上存储有计算机程序,所述程序被处理器执行时实现如本发明第一方面所述的方法。
27、与现有技术相比,本发明具有以下有益效果:
28、(1)本方法实现了隧道冲洗列车及冲洗设备与信号系统之间的接口,除在编制计划及特殊情况下的报警后需工作人员介入外,其余过程均无需工作人员参与,整个列车安全防护、列车运行、加水、信息反馈、隧道冲洗等均可在无人状态下完成,减少了工作人员的工作量,提高了运营的效率及系统的自动化水平.
29、(2)同时由于可实现对不同隧道断面的出水管角度自动调整,也可提高隧道冲洗的作业有效率,减少了水资源的浪费,降低了作业成本。
30、(3)轨旁资源管理器wrc将工作区域wz的轨旁资源设置为禁止态,禁止除冲洗列车以外的其他列车申请进入此区域的资源,从而保证冲洗作业在进行过程中的作业安全。
技术特征:
1.一种地铁隧道自动冲洗方法,其特征在于,基于信号自主运行系统tacs实现,所述信号自主运行系统tacs包括轨旁资源管理器wrc,ats子系统和atc车载控制器,所述atc车载控制器安装在地铁隧道冲洗列车上;方法包括:
2.根据权利要求1所述的一种地铁隧道自动冲洗方法,其特征在于,所述步骤step1中,工作人员在ats子系统设定隧道冲洗作业计划,所述隧道冲洗作业计划包括:冲洗列车加水时间、冲洗作业的计划起止时间、隧道冲洗范围、隧道冲洗方式、在一次作业未完成后是否二次加水并继续冲洗作业。
3.根据权利要求2所述的一种地铁隧道自动冲洗方法,其特征在于,步骤step2具体为:atc车载控制器控制冲洗列车在隧道冲洗作业计划规定的冲洗列车加水时间内运行至加水处自动加水,在规定的冲洗列车加水时间内,若加水完毕,则向ats子系统反馈加水成功完成,若加水未成功或加水未达到所要求的水位,则向ats子系统反馈加水失败,并在ats子系统工作站报警,ats子系统取消此次作业并提示工作人员人工介入。
4.根据权利要求1所述的一种地铁隧道自动冲洗方法,其特征在于,步骤step4中,atc车载控制器控制冲洗列车进入工作区域wz并到达隧道冲洗范围的起点之前,还包括:
5.根据权利要求1所述的一种地铁隧道自动冲洗方法,其特征在于,采用主动检测的方式确定冲洗列出的实时位置,即:冲洗列车通过读取位于轨道上的信标或根据自身的测速测距设备来确定冲洗列车的实时位置。
6.根据权利要求2所述的一种地铁隧道自动冲洗方法,其特征在于,隧道冲洗方式包括:顶部冲洗、侧面冲洗、下部冲洗中的任一种或多种。
7.根据权利要求1所述的一种地铁隧道自动冲洗方法,其特征在于,步骤step5中还包括:
8.根据权利要求7所述的一种地铁隧道自动冲洗方法,其特征在于,隧道的断面形状包括但不限于圆形、马蹄形、矩形。
9.根据权利要求2所述的一种地铁隧道自动冲洗方法,其特征在于,步骤step5中还包括:
10.根据权利要求9所述的一种地铁隧道自动冲洗方法,其特征在于,若预设为不进行二次加水冲洗,则本次冲洗作业已完成;若预设为进行二次加水冲洗,则atc车载控制器向轨旁资源管理器wrc申请返回车辆段的轨旁资源,控制冲洗列车加水,并在加水结束后返回上一次冲洗停止地点继续进行冲洗作业,直至完成冲洗作业。
11.一种电子设备,包括存储器和处理器,所述存储器上存储有计算机程序,其特征在于,所述处理器执行所述程序时实现如权利要求1~10中任一项所述的方法。
12.一种计算机可读存储介质,其上存储有计算机程序,其特征在于,所述程序被处理器执行时实现如权利要求1~10中任一项所述的方法。
技术总结
本发明涉及一种地铁隧道自动冲洗方法,基于信号自主运行系统TACS实现,方法包括:ATS子系统获取隧道冲洗作业计划并发送至ATC车载控制器;ATC车载控制器根据隧道冲洗作业计划控制冲洗列车加水;ATS子系统设置冲洗列车的工作区域WZ,由轨旁资源管理器WRC将WZ的轨旁资源设置为禁止态;ATS子系统向ATC车载控制器发送进入WZ的任务,ATC车载控制器控制冲洗列车进入WZ并到达隧道冲洗范围的起点;ATC车载控制器控制冲洗列车在隧道冲洗范围内运行并进行隧道冲洗;完成冲洗作业后,ATC车载控制器向ATS子系统反馈作业完成信息。与现有技术相比,本发明实现了隧道冲洗列车及冲洗设备与TACS之间的接口,减少了工作人员的工作量,提高了运营的效率及系统的自动化水平。
技术研发人员:王钰,马铮,宁源,王壮,郭掾龙,胡轶群,马永恒
受保护的技术使用者:卡斯柯信号有限公司
技术研发日:
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!