用于无人机的自主管理的设备和方法与流程
本发明涉及使用无人机的特殊负载的导航和运输领域。具体地,本发明涉及一种用于无人机在没有与远程引航员连接的情况下的自主导航的智能设备。现有技术的描述众所周知,当前的无人机具有各种安全系统来控制导航并且防止飞行器迷路。通常,这些安全系统在无线电连接丢失、临界能量自主性水平或偏离为任务设定的路线的情况下开始操作。在这种情况下,导航模式和在任务开始时设定的参数的配置被改变,使得无人机进入自主导航模式,该自主导航模式保持直到引航员远程干预。一般来讲,该自主导航模式是在任务开始时预定义的,并且简单地涉及返回到起飞基地(“返回到起飞点”模式)或在沿着路线的预定义着陆点(“安全检查点”)处着陆。此类自主导航的示例在us10889374b1中示出,其中在无线电连接丢失的情况下,飞行器被编程为到达第一或第二“航点”。另一个示例在us2021064025a1中示出。然而,此类系统不涉及对完成任务的可行性或对安全飞行条件的任何评估。这意味着几乎已经完成其任务的无人机可能被召回到基地,而此时其原本还具有能量自主性以沿着路径继续。此外,自动返回到基地是通过预设的直线飞行来执行的,在返回路径具有障碍物(诸如树或建筑物)的情况下,这可能导致对无人机的损坏。
背景技术:
技术实现思路
1、因此,本发明的特征是提供一种用于无人机的自主导航的智能设备,其允许在预先确定的危急条件发生时自主地控制无人机的导航。
2、此外,本发明的特征是提供这样一种智能设备,其能够在与控制站点的连接丢失的情况下独立地评估是否完成任务。
3、本发明的另一特征是提供这样一种智能设备,其可识别代替预定路线的替代轨迹以到达期望目的地。
4、这些和其他目的通过一种用于无人机的自主导航的智能设备来实现,该无人机包括用于允许该无人机在飞行中移动的至少一个马达,该智能设备包括控制单元,该控制单元被布置成在使用中连接到该马达或每个马达以便控制该无人机的导航,该控制单元还被布置成:
5、-通过无线连接与远程控制站点通信;
6、-获取任务路线γ,该无人机被布置成沿循该任务路线以到达期望目的地,该任务路线γ通过相对于参考系s(x,y,z)的坐标xm(t)、ym(t)、zm(t)定义;
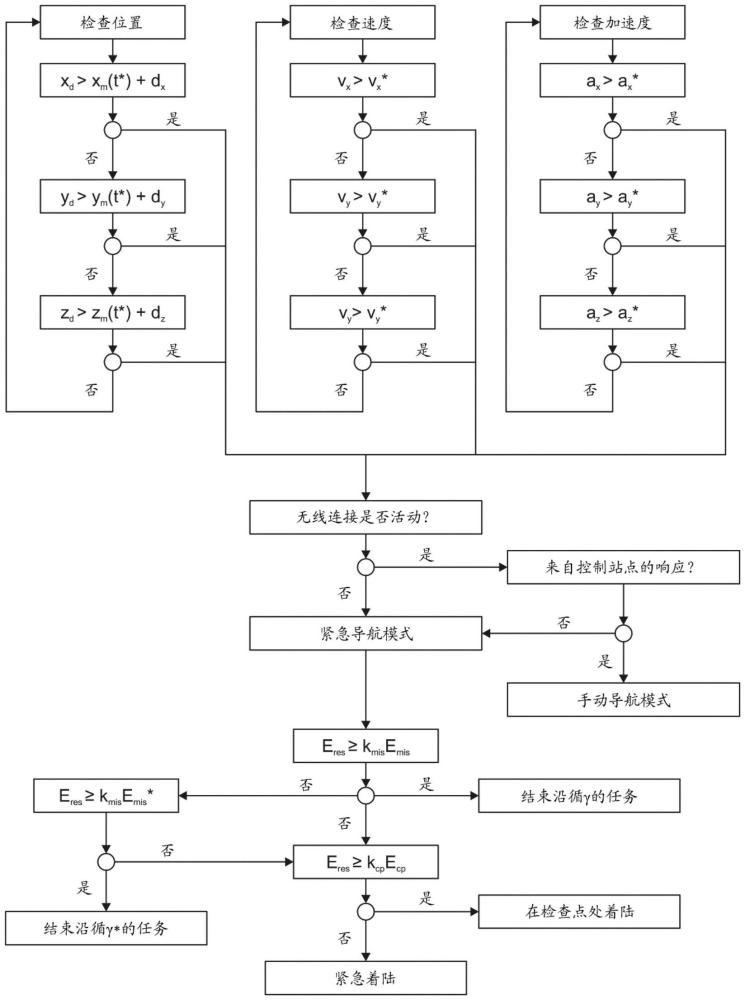
7、-周期性地获取值xd、yd、zd,这些值对应于无人机相对于参考系s(x,y,z)的空间位置的分量;
8、-周期性地获取值vx、vy、vz,这些值对应于无人机相对于参考系s(x,y,z)的速度的分量;
9、-周期性地获取值ax、ay、az,这些值对应于无人机相对于参考系s(x,y,z)的加速度的分量;
10、其主要特征是所述控制单元还被布置成:
11、-在以下条件中的至少一个条件发生的情况下检查与远程控制站点的无线连接的状态:
12、-在时间t*,xd>xm(t*)+dx和/或yd>ym(t*)+dy和/或zd>zm(t*)+dz;
13、-和/或和/或
14、-和/或和/或
15、其中dx、dy、dz、是预先确定的值;
16、-在无线连接活动的情况下,向远程控制站点发送报警信号并且等待响应时间tr;
17、-在无线连接不活动的情况下或者在响应时间tr内没有远程控制站点的响应的情况下,激活紧急导航模式,其中控制单元被布置成:
18、-获取值eres,该值对应于在无人机上可用的能量;
19、-计算值emis,该值对应于无人机沿循任务路线γ以到达期望目的地所要求的能量;
20、-在eres≥kmis*emis,其中kmis是大于或等于1的系数的情况下,控制无人机沿着任务路线γ的导航;
21、-在eres<k*emis的情况下,控制无人机沿着替代任务路线γ的路线的导航以使无人机执行安全着陆。
22、具体地,为了计算值emis,控制单元被布置成执行对沿着直到期望目的地的任务路线γ作用的风的速度的估计。
23、具体地,基于以下源中的至少一个源来估计风的速度:
24、-在统计基础上制作的风图;
25、-互联网上的天气预报;
26、-由位于任务路线γ附近的气象站点提供的数据;
27、-在任务开始之前提供的数据。
28、另选地,沿着任务路线γ的风的速度可通过测量作用在无人机上的风速来估计,例如通过使用放置在无人机自身上的传感器或者通过马达为将无人机保持在适当位置而产生的能量消耗的差异。
29、有利地,在eres<k*emis的情况下,控制单元被布置成:
30、-执行对沿着替代任务路线γ的多条路线γi作用的风的速度的估计,并且能够允许无人机到达期望目的地;
31、-对于每条路线计算γi计算值该值对应于无人机沿循路线γi以到达期望目的地所要求的能量;
32、-识别能量值之间的较低值该较低值与路线γ*相关联;
33、-在的情况下,控制无人机沿着直到期望目的地的路线γ*的导航。
34、另选地或在确定替代路线的步骤之后,在eres<kmis*emis的情况下,控制单元被布置成:
35、-计算值ecp,该值对应于无人机到达任务路线γ附近的至少一个检查点所要求的能量;
36、-在eres≥kcp*ecp,其中kcp是大于或等于1的系数的情况下,控制无人机沿着替代任务路线的导航以使无人机降落在检查点处。
37、具体地,在eres<kcp*ecp的情况下,控制单元被布置成控制无人机的导航以执行紧急着陆。
38、具体地,在无人机上存在用于维持所运输的负载的温度的制冷设备的情况下,计算emis、和ecp的值包括评估用于维持温度的此类制冷设备的消耗的步骤。
39、有利地,响应时间tr是预先确定的时间。具体地,tr=3s
40、另选地,响应时间tr由控制单元基于无线连接的响应速度来计算。
41、具体地,tr根据以下等式通过使用智能设备与远程控制站点之间的ping来计算:
42、
43、其中是无线连接的ping往返时间的平均值,β是连续概率分布值,并且σp是ping往返时间的标准差。
44、有利地,在紧急导航模式下,控制单元被布置成在时间ts内以搜索频率f1检查无线连接的状态,并且其中在时间ts之后,控制单元被布置成以搜索频率f2<f1检查无线连接的状态。
45、具体地,时间ts可以是预先确定的时间,或者可基于完成紧急导航所需的总时间来计算。例如,ts可以是完成到达期望目的地或在紧急导航模式下进行提前着陆所要求的估计时间的预先确定的百分比。
46、另选地或组合地,当值eres低于预先确定的阈值时,或者在达到完成紧急导航所要执行的航段的预先确定的百分比时,控制单元可以从搜索频率f1切换到搜索频率f2。
47、以此方式,当紧急导航接近结束时,控制单元可逐渐减少用于搜索无线连接信号的能量消耗。例如,在一定时间或在紧急导航模式下所要完成的路线的一定百分比之后,控制单元可完全停止检查连接状态,因为远程恢复导航将不再方便。
48、具体地,当无人机在紧急导航期间进入着陆阶段时,该过程不能被远程控制站点中断。这是因为,一旦着陆阶段已经开始,就不再方便中断该阶段,而是要完成着陆并且执行新的起飞。
49、有利地,该智能设备还包括:
50、-定位装置,该定位装置被布置成测量无人机相对于参考系s(x,y,z)的空间位置的分量xd、yd、zd;
51、-速度测量装置,该速度测量装置被布置成测量无人机相对于参考系s(x,y,z)的速度的分量vx、vy、vz;
52、-加速度测量装置,该加速度测量装置被布置成测量无人机相对于参考系s(x,y,z)的加速度的分量ax、ay、az。
53、具体地,该智能设备还包括天线,该天线被布置成在该智能设备与该远程控制站点之间提供无线连接。
54、具体地,无线天线还可建立互联网连接。
- 还没有人留言评论。精彩留言会获得点赞!