用于高维物理系统的建模、预测和控制的鲁棒自适应动态模式分解的制作方法
本发明总体上涉及系统建模、预测以及控制。更特别地,本发明涉及利用动态模式分解进行鲁棒数据驱动模型自适应以控制机器的方法和设备。
背景技术:
1、控制系统工程方面的控制理论是涉及对工程过程和机器中的连续操作的动力学系统(dynamical system)的控制的数学子域。目的是开发一种控制策略,以用于在没有延迟或过冲的情况下,以最优方式使用控制动作来控制这种系统并确保控制稳定性。
2、例如,诸如模型预测控制(mpc)之类的基于优化的控制和估计技术允许其中可以直接考虑系统动力学和约束的基于模型的设计框架。mpc在许多应用中被用于控制各种复杂性的动力学系统。这种系统的示例包括生产线、汽车发动机、机器人、数控机床、电动机、卫星以及发电机。如本文所使用的,系统的动力学模型或者系统的模型使用微分方程来描述系统的动力学。
3、然而,在许多情形中,受控系统的模型是非线性的,并且可能难以设计、难以实时使用,或者可能只是不准确的。这种情况的示例在机器人技术、建筑控制(hvac)、智能电网、工厂自动化、运输、自校正机器、以及交通网络中很普遍。
4、在缺少动力学系统的准确模型的情况下,一些控制方法利用由这些系统生成的可操作数据,以便构建有助于例如响应于控制动作而对系统在给定时间范围内的行为进行预测的模型。使用数据来设计预测模型和控制策略被称为数据驱动建模和控制。
5、被用于设计用于估计和控制的模型的现有数据驱动方法的缺点是对于系统中的不确定性缺乏鲁棒性。实际上,这些不确定性可以源自多个因素;例如,系统可能引入未被所收集的数据捕获的不确定性来构建模型。而且,有噪声测量也可以在数据驱动模型中引入不确定性。
6、需要克服这个重要的问题,我们在本发明中提出了基于动态模式分解(dmd)来使数据驱动模型变鲁棒的算法,其中数据是通过直接测量来从系统收集的。所获得的鲁棒自适应dmd(ra-dmd)模型然后被用于估计以及对系统的控制。
技术实现思路
1、一些实施方式的目的是提供一种用于系统的动力学模型的数据驱动设计的系统和方法,以生成对于系统的不确定性是鲁棒的系统的动力学模型。以这样的方式,实施方式简化了模型设计过程,同时保留了在设计控制应用中具有系统的模型的优点。然而,当前的数据驱动方法不适合估计对系统的物理动力学的不确定性进行捕获的系统模型。
2、例如,需要重复模拟具有大量参数的偏微分方程(pde)的物理学和工程方面的问题是普遍存在的。这些问题出现在控制、优化、以及不确定性量化领域中,其中对pde模型进行求解通常太耗时。在控制和优化中使用降阶模型(reduced-order model,rom)(即,将pde模型降阶(reducing)至有限维常微分方程(ode)的系统)已经导致了针对极具挑战性的系统的实际解决方案,诸如热流体系统(例如,hvac系统)和风电场等等的控制。
3、来自实验或模拟的越来越大的数据集的存在使得能够使用像动态模式分解(dmd)的方法来设计rom,该方法可以在给定的系统参数集下从所述数据中提取易处理的且物理相关的信息。然而,一个主要挑战是rom可能引入稳定性损失和预测降级。这些降级主要是由于高阶模式截断(truncation of higher mode)和参数不确定性。更具体地,在给定的一个参数集下从数据快照获得的基函数(空间模式)在被应用以表示针对不同参数范围的解时,可能示出rom预测的准确度的劣化甚或变得不稳定。
4、因此,本发明可以针对具有参数不确定性的偏微分方程(pde)提供稳定的降阶模型(rom)的设计。更具体地,一些实施方式在此集中于使用动态模式分解(dmd)来将pde降阶成dmd-rom,然后在非线性鲁棒控制框架下推出rom稳定化或闭包(closure)问题。利用这种鲁棒控制框架,我们设计了对于参数不确定性和模式截断是鲁棒的两种dmd-rom闭包模型。我们最后向我们的框架添加了自适应层,其中,我们利用数据驱动极值搜索控制器来实时调整闭包模型。
5、本发明解决了这种问题,并且涉及使用数据测量来构建用于大规模系统的鲁棒自适应模型,例如,具有数百万状态的气流模型。
6、一些实施方式描述了如何使用动态模式分解(dmd)来构建系统的大规模模型的最优近似。更具体地,一些实施方式描述了如何使dmd方法变鲁棒以设计鲁棒自适应dmd方法(ra-dmd),即使在所观察的系统中存在不确定性的情况下,该ra-dmd也导致大规模模型的鲁棒最优模型近似。
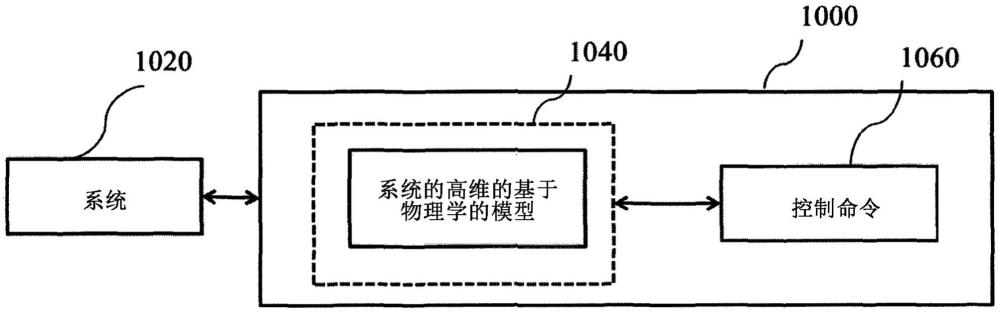
7、根据本发明的一些实施方式,提供了一种计算机实现方法。所述计算机实现方法可以包括被存储在存储器中的数据驱动模型和鲁棒闭包模型,所述计算机实现方法使用处理器来控制系统,所述计算机实现方法包括以下步骤:经由接口从系统的至少一个传感器获取传感器信号;基于传感器信号来计算系统的状态;基于系统的状态来确定鲁棒闭包模型的增益;基于所确定的增益来再现系统的状态;通过组合数据驱动模型和鲁棒闭包模型来估计系统的基于物理学的模型;以及通过使用所估计的基于物理学的模型对系统的状态进行映射来生成控制命令。
8、此外,本发明的一些实施方式可以提供用于控制系统的操作的控制器。在这种情况下,该控制器可以包括输入接口,该输入接口被配置成经由网络接收系统的状态轨迹;存储器,该存储器被配置成存储系统的动力学模型,该动力学模型包括至少一个基于动态模式分解的数据驱动模型和鲁棒闭包模型的组合;以及处理器,该处理器被配置成:使用具有值函数的优化算法来对鲁棒闭包模型进行更新,该值函数减小所接收的状态轨迹的形状与使用具有经更新的鲁棒闭包模型的模型估计的状态轨迹的形状之间的差;基于具有经更新的鲁棒闭包模型的数据驱动模型来确定控制命令;以及输出接口,该输出接口被配置成向系统的致动器发送控制命令以对该系统的操作进行控制。
9、附图包括进来以提供对本发明的进一步理解,附图例示了本发明的实施方式并与本说明书一起用于解释本发明的原理。
技术特征:
1.一种通过使用处理器来控制系统的、包括存储在存储器中的数据驱动模型和鲁棒闭包模型的计算机实现方法,所述计算机实现方法包括以下步骤:
2.根据权利要求1所述的计算机实现方法,其中,网络是有线网络或无线网络。
3.根据权利要求1所述的计算机实现方法,其中,所述至少一个传感器被配置成测量所述系统的状态。
4.根据权利要求1所述的计算机实现方法,其中,在所述数据驱动模型模块和所述鲁棒闭包模型中使用的参数的数量小于在基于物理学的高维模型中使用的参数的数量。
5.根据权利要求1所述的计算机实现方法,其中,所述鲁棒闭包模型是基于非线性鲁棒控制方法设计的。
6.根据权利要求1所述的计算机实现方法,其中,所述闭包模型是基于偏微分方程(pde)的边界条件来公式化的,其中,所述边界条件是随时间改变的。
7.根据权利要求1所述的计算机实现方法,其中,所述鲁棒闭包模型是由所述系统的所述状态的线性函数或者所述系统的所述状态的非线性函数来表示的。
8.根据权利要求1所述的计算机实现方法,其中,所述系统是空调系统。
9.根据权利要求1所述的计算机实现方法,其中,所述系统是车辆操作系统。
10.根据权利要求1所述的计算机实现方法,其中,所述系统是感应电动机系统。
11.一种用于控制系统的操作的控制器,所述控制器包括:
12.根据权利要求11所述的控制器,其中,所述网络是有线网络或无线网络。
13.根据权利要求11所述的控制器,其中,至少一个传感器被配置成测量所述系统的所述状态轨迹。
14.根据权利要求11所述的控制器,其中,在所述至少一个基于动态模式分解的数据驱动模型和所述鲁棒闭包模型中使用的参数的数量小于在基于物理学的高维模型中使用的参数的数量。
15.根据权利要求11所述的控制器,其中,所述鲁棒闭包模型是基于非线性鲁棒控制方法来设计的。
16.根据权利要求11所述的控制器,其中,所述鲁棒闭包模型是基于偏微分方程(pde)的边界条件来公式化的,其中,所述边界条件是随时间改变的。
17.根据权利要求11所述的控制器,其中,所述鲁棒闭包模型是由所述系统的所述状态的线性函数或者所述系统的所述状态的非线性函数来表示的。
18.根据权利要求11所述的控制器,其中,所述系统是空调系统。
19.根据权利要求11所述的控制器,其中,所述系统是车辆操作系统。
20.根据权利要求11所述的控制器,其中,所述系统是感应电动机系统。
技术总结
提供了一种计算机实现方法。该计算机实现方法包括被存储在存储器中的数据驱动模型和鲁棒闭包模型,通过使用处理器来控制系统。该计算机实现方法包括以下步骤:经由接口从系统的至少一个传感器获取传感器信号;基于传感器信号来计算系统的状态;基于系统的所述状态来确定鲁棒闭包模型的增益;基于所确定的增益来再现系统的状态;通过组合数据驱动模型和鲁棒闭包模型来估计系统的基于物理学的模型;以及通过使用所估计的基于物理学的模型对系统的状态进行映射来生成控制命令。
技术研发人员:M·本诺斯曼,S·纳比
受保护的技术使用者:三菱电机株式会社
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!