两轮自平衡机器人
本公开涉及一种分布式实时机器学习两轮机器人。
背景技术:
0、背景技术和
技术实现要素:
1、本部分提供了与本公开相关的、不一定是现有技术的背景信息。本部分提供了本公开的总体概述,并不是对本公开的全部范围或本公开的所有特征的全面公开。
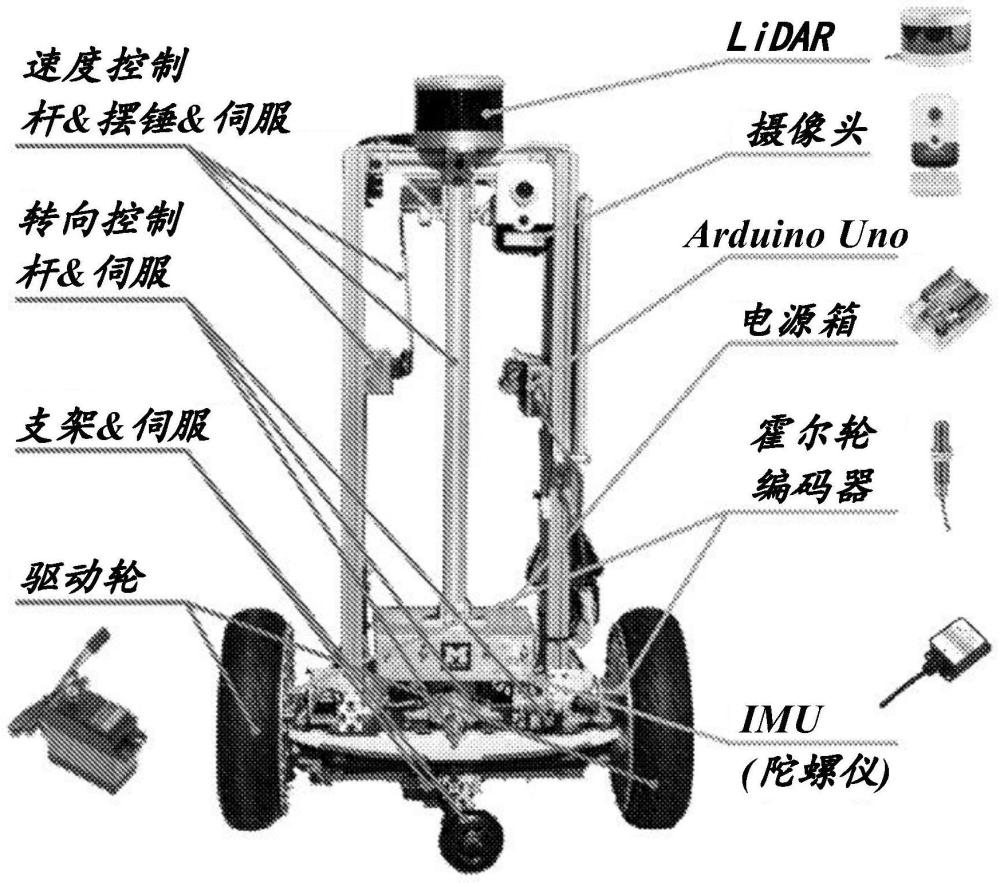
2、在一些实施例中,本教导的机器人(本文通常称为“xbot”)是一种协作式两轮自平衡机器人,其由最新的实时深度学习技术提供动力。在一些实施例中,该机器人高度高于1米并且能够在房间、田野、工厂、室内和室外运行。在一些实施例中,每个xbot配备有激光雷达(lidar)、一个或多个摄像头、全球定位系统(gps)传感器、陀螺仪传感器、以及几个其它板载传感器。在一些实施例中,xbot可以通过可用的无线链路在它们之间交换信息,该可用的无线链路包括蜂窝移动无线链路、本地wifi或远距离无线电(lora)、低功耗广域网(lowpower wide area,lpwa)和/或到远程传感器的蓝牙低功耗(bluetooth low energy,ble)接口。对来自激光雷达点云、图像和传感器这两者的数据集的专有实时深度学习(real-time deep learning,rtdl)创建了包括智能监测、建模、分析、检测、测量和监控的高级功能。
3、xbot是用于以下项的领先解决方案:室内设施/室外设施的智能监控和巡逻;异常行为或入侵者检测和监测;对无预设的感兴趣目标的测量和定位;以及快速且节省成本的三维(3d)建图和目标重建。xbot是建立在快速和敏捷的类似赛格威(segway)滑板车上的、以以下方面为特征的实时深度学习(real-time deep learning,rtdl)机器人。
4、rtdl:目前,机器人以所设计的很少关注变化和衍生(其通常是不可避免的且往往很重要)的方式对环境做出反应。一旦采用实时深度学习(rtdl),通过持续感知、即时学习和主动调整来应对环境的变化和不确定性,情况就会改变。随着时间的推移,rtdl获得了更多的经验(就像中国的成语:老马识途),并能够对环境进行分类和建模,从而定期或意外地进化以很好地适应新的应用和任务。
5、多模态检测:基于高清图像的智能有助于定位移动或静止的目标,而精确的距离测量和定位则由激光雷达数据一致地提供。此外,xbot能够自适应地四处移动以达到最佳性能,在高达100米范围内的估计精度为厘米。
6、协作式ai:此外,两个或更多个xbot可以在有云或没有云的情况下协作或一起工作,以实现提供了前所未有的功能和性能的分布式机器学习。内置导航支持航路点例程以及智能巡逻和巡航。
7、更多的适用的方面将从本文提供的描述中变得显而易见。该概述中的描述和具体示例仅用于说明目的,并不旨在限制本公开的范围。
技术实现思路
技术特征:
1.一种两轮自平衡机器人,所述两轮自平衡机器人包括:
2.根据权利要求1所述的两轮自平衡机器人,其中,所述至少一个传感器包括激光雷达lidar系统,所述lidar系统耦接到所述支承结构并向所述自平衡和驱动系统输出数据。
3.根据权利要求1所述的两轮自平衡机器人,其中,所述至少一个传感器包括单目网络摄像头,所述单目网络摄像头耦接到所述支承结构并向所述自平衡和驱动系统输出数据。
4.根据权利要求1所述的两轮自平衡机器人,其中,所述至少一个传感器包括惯性测量单元,所述惯性测量单元耦接到所述支承结构并向所述自平衡和驱动系统输出数据。
5.根据权利要求1所述的两轮自平衡机器人,其中,所述至少一个传感器包括两轮编码器,所述两轮编码器耦接到所述支承结构并向所述自平衡和驱动系统输出数据。
6.根据权利要求1所述的两轮自平衡机器人,其中,所述至少一个致动器包括两个数字伺服,所述两个数字伺服与摆锤和转向杆连接。
7.根据权利要求1所述的两轮自平衡机器人,其中,所述至少一个处理器包括至少一个微控制器和中央处理单元。
8.根据权利要求1所述的两轮自平衡机器人,其中,所述至少一个处理器和所述自平衡和驱动系统中的至少一者被配置为向所述一对驱动轮提供驱动功率以提供避障控制。
9.根据权利要求8所述的两轮自平衡机器人,其中,所述避障控制是基于2d局部网格地图和模糊逻辑提供的。
10.根据权利要求8所述的两轮自平衡机器人,其中,所述避障控制是基于以下提供的:基于协同校准的数据融合。
11.根据权利要求8所述的两轮自平衡机器人,其中,所述避障控制是基于以下提供的:基于rao-blackwellized粒子滤波的二维即时定位与地图构建2d slam。
12.根据权利要求8所述的两轮自平衡机器人,其中,所述避障控制是基于使用2d全局网格地图的路径规划提供的。
技术总结
一种基于两轮赛格威(SEGWAY)自平衡滑板车的自动驾驶机器人。包括激光雷达(LiDAR)、摄像头、编码器和IMU的传感器与作为致动器的数字伺服一起实现。同时对该机器人的多个功能特征进行了测试,这些功能包括基于模糊逻辑和2D网格地图的避障、基于协同校准的数据融合、二维同时定位与地图构建(2D SLAM)、以及室内和室外不同场景下的路径规划。因此,机器人初步具备了对避开障碍物并同时构建2D网格地图进行自主探索的能力。基于机器人操作系统(ROS)和Gazebo,还测试并执行了除数据融合外具有相同功能的机器人仿真,作为机器人在真实世界中的简单比较。
技术研发人员:向卫东
受保护的技术使用者:密歇根大学董事会
技术研发日:
技术公布日:2024/5/12
- 还没有人留言评论。精彩留言会获得点赞!