一种应急物资运输机器人控制系统及方法
本发明涉及应急物资运输机器人轨迹跟踪控制领域,具体是一种应急物资运输机器人控制系统及方法。
背景技术:
1、“无接触”配送在应急物资运输中具有重要的作用,应急物资运输机器人的轨迹跟踪控制是实现“无接触”配送精准化的关键技术。应急物资运输机器人可以协助或取代人类的工作,当在火灾、地震、深水、坑洞等人类难以到达的环境中救援、物资运输等工作受限时,运动灵活、适应性强的应急物资运输机器人能有效降低受灾者承受的风险,为工作的开展提供必要支撑;在某些传染病医疗救助中,要减少人员流动,降低交叉感染风险,得益于应急物资运输机器人的逐步应用,在保障物资运输的准确性及工作效率的同时,最大限度地保护人们的安全和健康。因此,能够实现“无接触”配送的应急物资运输机器人发挥了重要作用,以机器代替人工,通过对应急物资运输机器人的控制实现精准化、快速化和安全化的物资运输。
2、目前对应急物资运输机器人轨迹跟踪控制,多采用滑模控制策略,不仅鲁棒性强、响应快速,而且不需要系统在线辨识,但是系统存在的“抖振”问题会影响控制精度。当载重运输时,确定应急物资运输机器人系统的某些参数很困难,未知的质量、摩擦力等因素会降低系统的控制精度。实际机器人系统中存在各种不同的约束,若忽略掉各种约束可能会导致实际控制性能变差甚至使系统不稳定。应急物资运输机器人在运输物资时易受到干扰,不仅有参数不确定性等内部干扰,还有静摩擦、控制信号的噪声等外部干扰,因此要提高控制系统的抗干扰能力。
3、针对应急物资运输机器人轨迹跟踪控制存在的难点,采用不同的方法使系统的性能达到最优,采用递推最小二乘参数辨识方法对应急物资运输机器人的参数进行辨识,提高模型的精度;采用模糊控制方法加快机器人的轨迹跟踪速度;采用能有效处理多变量、有约束问题的模型预测控制方法设计控制器。尽管模型预测控制有较强的鲁棒性,但是当系统存在持续干扰时它的性能将会变差,因此加入扩张状态观测器来估计干扰,提高轨迹跟踪精度,基于模糊模型预测控制和扩张状态观测器的应急物资运输机器人控制方法能够保证机器人在精准运送物资的同时保持自身稳定性与抗干扰能力,实现“无接触”、高效便捷的物资运输。
技术实现思路
1、本发明的目的在于提供一种应急物资运输机器人控制系统及方法,以解决上述背景技术中提出的问题。
2、为实现上述目的,本发明提供如下技术方案:一种应急物资运输机器人控制系统及方法,其特征在于,包括以下步骤:
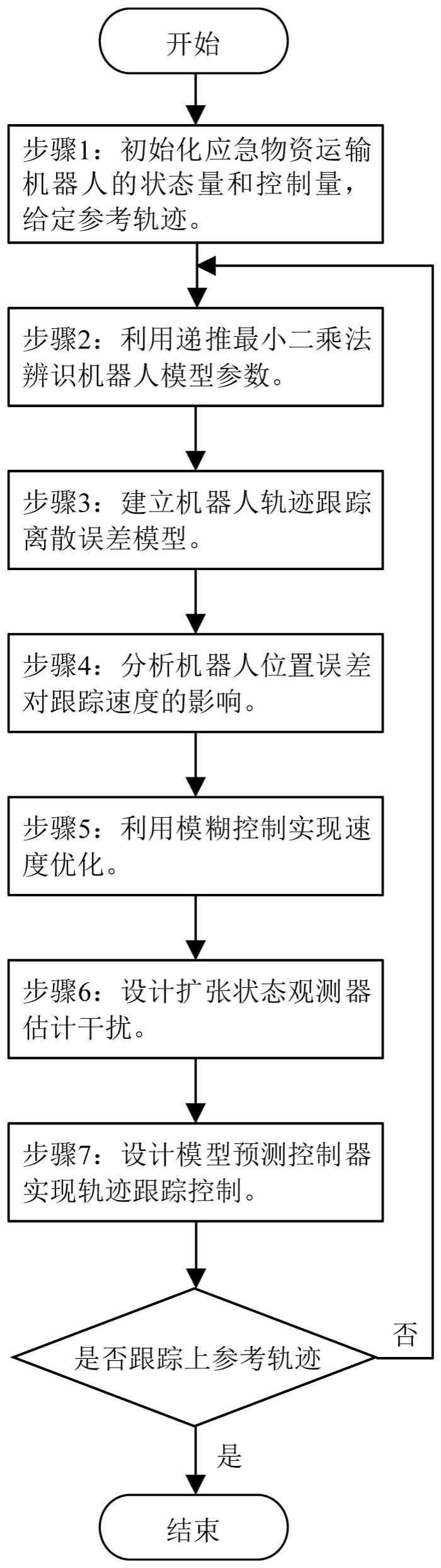
3、s1:定义应急物资运输机器人的状态量x包括横坐标位置x、纵坐标位置y和前进方向与横坐标的夹角θ,控制量u包括速度v和角速度ω,给定期望状态量xr(k)和期望控制量ur(k);
4、s2:建立应急物资运输机器人的运动学模型,采用递推最小二乘法辨识模型中的参数;
5、s3:根据实际状态和期望状态得到状态误差为控制量误差为建立轨迹跟踪离散误差模型;
6、s4:分析应急物资运输机器人的实际位置与期望位置的误差对轨迹跟踪速度的影响;
7、s5:根据应急物资运输机器人位置误差对轨迹跟踪速度的影响,采用模糊控制对速度进行优化,使得:
8、(1)当应急物资运输机器人实际位置与参考轨迹的横向误差和纵向误差都比较大时,为了快速减小跟踪误差,应侧重机器人跟踪性的目标,适当增加速度误差的值;
9、(2)当应急物资运输机器人实际位置与参考轨迹的横向误差和纵向误差都比较小时,为了保持较好的稳定性,适当减小速度误差的值;
10、s6:针对应急物资运输机器人在实际运行过程中不可避免地受到外界的干扰,设计扩张状态观测器,实现对扰动的精确估计并补偿到s7得出的控制量中;
11、s7:设计模型预测控制器实现应急物资运输机器人的轨迹跟踪控制:
12、(1)根据应急物资运输机器人要达到的目标和存在的约束,给定目标函数j(k)和约束条件;
13、(2)给定预测时域np和控制时域nc,将目标函数转化成二次规划形式;
14、(3)通过求解二次规划问题得到控制时域内的所有控制输入量,取控制序列中的第一个元素作为实际的控制输入量作用于系统;
15、(4)若应急物资运输机器人没有跟踪上参考轨迹,返回s2;
16、进一步地,所述应急物资运输机器人活动轨迹上设定有一个期望的轨迹,使应急物资运输机器人跟踪上期望轨迹,并确定机器人当前状态量和控制量。
17、进一步地,所述应急物资运输机器人的模型采用递推最小二乘法对模型中的参数进行辨识,参数辨识的过程包括:
18、(1)拆分:应急物资运输机器人系统是mimo系统,将mimo系统拆分为多个siso系统的递推最小二乘参数辨识问题;
19、(2)目标:使各次测量的状态量与由待估计参数的估计值确定的测量估计之差的平方和最小;
20、(3)算法:由n+1次实验得到的观测数据得到递推最小二乘算法如公式(1)~(3),
21、
22、
23、
24、式中:定义时刻估计值,kj(n+1)—增益矩阵,xj(n+1)—n+1时刻状态量的观测值,fj(n+1)—n+1时刻状态量与控制量测量值的集合,—在之前测量的基础上对本次测量值的预测,—预测误差;
25、(4)停机机制:递推最小二乘法的参数估计达到一定精度后选用式(4)所示的停机准则自动停止递推运算,
26、
27、式中:δ为适当小的数。
28、进一步地,所述应急物资运输机器人根据角速度ω调整跟踪方向,根据线速度v消除状态误差;当所述应急物资运输机器人实际位置落后于期望位置时需要加速,当所述应急物资运输机器人超前于期望位置时需要减速来弥补误差。
29、进一步地,将xe和ye作为模糊控制器的输入,ve和ωe作为模糊控制器的输出设计模糊控制器,所述输入和输出的模糊子集选择为7个,所述模糊控制子集语言可表示为{nb(负大),nm(负中),ns(负小),ze(零),ps(正小),pm(正中),pb(正大)}。
30、进一步地,所述控制器输入变量采用高斯型隶属度函数作为输入变量的隶属度函数,所述控制器输出变量采用三角形和梯形作为输出变量的隶属度函数;所述高斯型隶属度函数、三角形和梯形得到的隶属度函数通过重心法将模糊值清晰化。
31、进一步地,利用eso对系统受到的总扰动进行估计,并利用估计值对应急物资运输机器人系统进行前馈补偿,以提高系统的稳定性和抗干扰能力,设计线性eso如式(5)所示,
32、
33、式中:—系统状态ξ(k)的估计值,—干扰的估计值,β0、β1—观测器的增益矩阵;
34、进一步地,所述目标函数能够同时体现系统对控制器跟踪参考轨迹的精度要求和控制输入变化量的稳定性要求,所述目标函数能够对输出状态误差和控制增量准确约束并加入松弛因子。
35、与现有技术相比,本发明的有益效果是:
36、1、针对应急物资运输机器人轨迹跟踪控制存在的难点,采用不同的方法使系统的性能达到最优;采用递推最小二乘参数辨识方法对应急物资运输机器人的参数进行辨识,提高模型的精度;采用模糊控制方法加快机器人的轨迹跟踪速度;采用能有效处理多变量、有约束问题的模型预测控制方法设计控制器。
37、2、尽管模型预测控制有较强的鲁棒性,但是当系统存在持续干扰时它的性能将会变差,因此加入扩张状态观测器来估计干扰,提高轨迹跟踪精度,使机器人在精准运送物资的同时保持自身稳定性与抗干扰能力,实现“无接触”、高效便捷的物资运输。
- 还没有人留言评论。精彩留言会获得点赞!