一种基于时间窗口的机器人巡检规划方法和装置、电子设备与流程
本发明涉及智能硬件,尤其涉及一种基于时间窗口的机器人巡检规划作方法和装置、电子设备。
背景技术:
1、机器人巡检规划问题本质是一个成本问题,通过最小化巡检时间或最小化巡检路程来求解巡检规划结果。
2、在一些巡检场景下,每个巡检任务的巡检时间不受限制,还有一些巡检场景下,每个巡检任务都会有最晚执行时间的限制,所以在求解最优巡检规划结果的时候需要保证每个巡检任务在相应的最晚执行时间之前完成。值得一提的是,在部分时间敏感场景下,巡检任务的完成时间不仅要在最晚执行时间之前,还要在最早执行时间之后。
3、可见,如何为时间敏感巡检场景下的巡检机器人进行合理的合理的巡检规划,是本领域技术人员迫切需要解决的技术问题。
技术实现思路
1、本发明实施例的目的是提供一种基于时间窗口的机器人巡检规划方法和装置、电子设备,能够解决目前无法为时间敏感巡检场景下的巡检机器人进行巡检规划的问题。
2、为解决上述技术问题,本发明提供如下技术方案:
3、本发明实施例提供了一种基于时间窗口的机器人巡检规划方法,其中,所述方法包括:
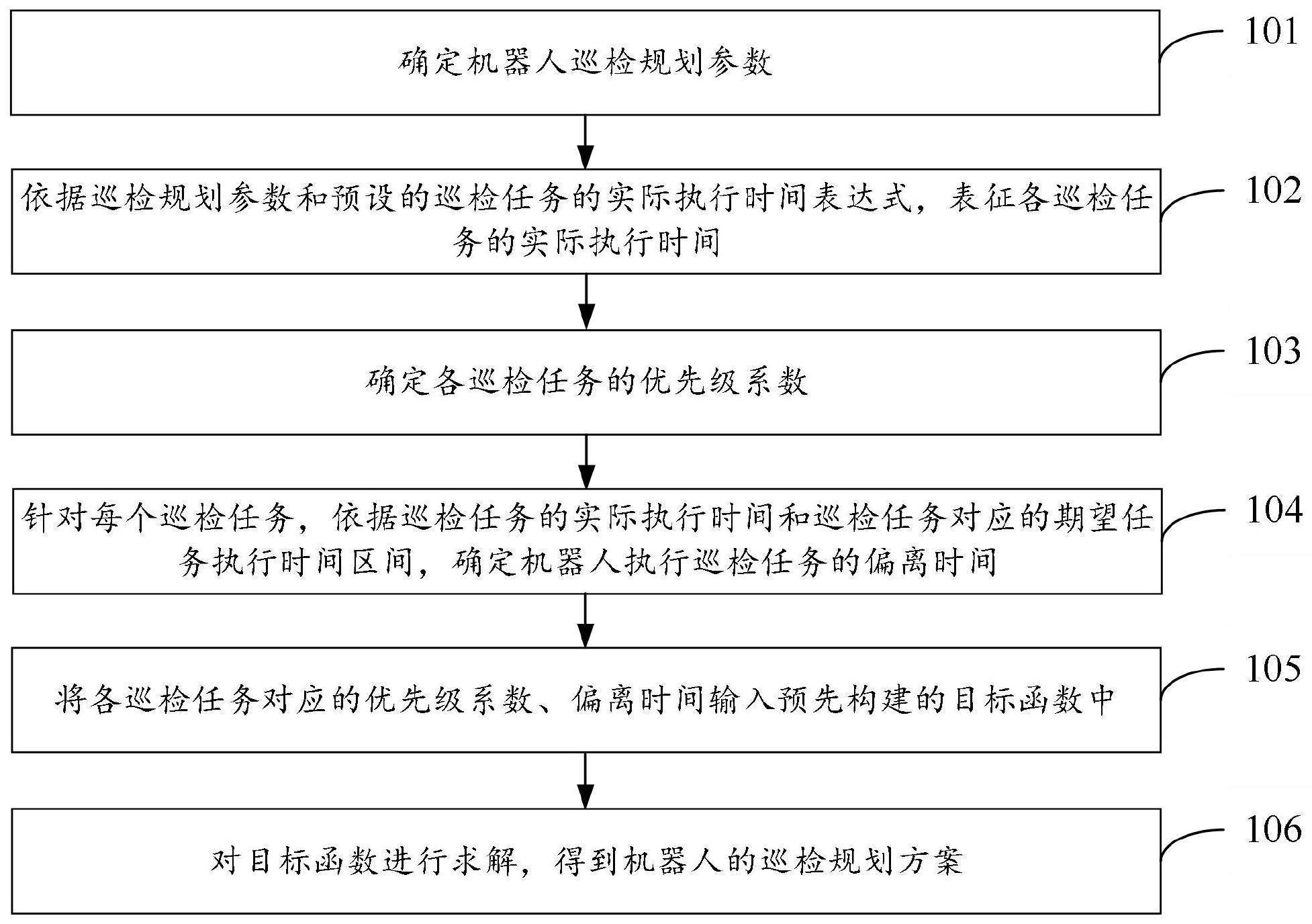
4、确定机器人巡检规划参数,其中,所述巡检规划参数包括:所述机器人在起始位置的启动时间、各巡检目标的位置信息、完成各巡检任务所耗时长以及所述机器人移动速度,其中,一个所述巡检目标对应一个巡检任务;
5、依据所述巡检规划参数和预设的巡检任务的实际执行时间表达式,表征各所述巡检任务的实际执行时间;
6、确定各所述巡检任务的优先级系数;
7、针对每个所述巡检任务,依据所述巡检任务的实际执行时间和所述巡检任务对应的期望任务执行时间区间,确定所述机器人执行所述巡检任务的偏离时间;
8、将各所述巡检任务对应的优先级系数、偏离时间输入预先构建的目标函数中,其中,所述目标函数指示在考虑各巡检任务优先级的情况下机器人执行全部巡检任务的偏离时间最小;
9、对所述目标函数进行求解,得到所述机器人的巡检规划方案,其中,所述巡检规划方案包括:各巡检任务的执行顺序。
10、可选地,所述依据所述巡检规划参数和预设的巡检任务的实际执行时间表达式,表征各所述巡检任务的实际执行时间的步骤,包括:
11、基于各巡检目标的位置信息,确定各巡检目标间的距离;
12、基于所述机器人移动速度和各巡检目标间的距离,确定机器人从前一个巡检目标到达后一个巡检目标所耗时长;
13、依据完成各巡检目标所耗时长、机器人从前一个巡检目标达到后一个巡检目标所耗时长、所述机器人在初始位置的启动时间,表征各所述巡检任务的实际执行时间。
14、可选地,针对每个所述巡检任务,依据所述巡检任务的实际执行时间和所述巡检任务对应的期望任务执行时间区间,确定所述机器人执行所述巡检任务的偏离时间的步骤,包括:
15、针对每个所述巡检任务,比对所述巡检任务的实际执行时间与所述巡检任务对应的期望任务执行时间区间的上限值、下限值之间的大小关系;
16、依据所述大小关系,确定所述巡检任务的偏离时间计算公式;
17、基于偏离时间计算公式、所述巡检任务的实际执行时间以及所述巡检任务对应的期望任务执行时间区间,计算所述机器人执行所述巡检任务的偏离时间。
18、可选地,依据所述大小关系,确定所述巡检任务的偏离时间计算公式的步骤,包括:
19、在所述巡检任务的实际执行时间大于所述巡检任务对应的期望任务执行时间区间的上限值的情况下,确定所述实际执行时间与所述上限值之差为所述巡检任务的偏离时间;
20、在所述巡检任务的实际执行时间小于所述巡检任务对应的期望任务执行时间区间的下限值的情况下,确定所述下限值与所述实际执行时间之差为所述巡检任务的偏离时间。
21、可选地,所述目标函数表征全部所述巡检任务的对应的优先级系数与偏离时间的乘积之和最小。
22、本发明实施例还提供了一种基于时间窗口的机器人巡检规划装置,其中,所述装置包括:
23、第一确定模块,用于确定机器人巡检规划参数,其中,所述巡检规划参数包括:所述机器人在起始位置的启动时间、各巡检目标的位置信息、完成各巡检任务所耗时长以及所述机器人移动速度,其中,一个所述巡检目标对应一个巡检任务;
24、表征模块,用于依据所述巡检规划参数和预设的巡检任务的实际执行时间表达式,表征各所述巡检任务的实际执行时间;
25、第二确定模块,用于确定各所述巡检任务的优先级系数;
26、第三确定模块,用于针对每个所述巡检任务,依据所述巡检任务的实际执行时间和所述巡检任务对应的期望任务执行时间区间,确定所述机器人执行所述巡检任务的偏离时间;
27、输入模块,用于将各所述巡检任务对应的优先级系数、偏离时间输入预先构建的目标函数中,其中,所述目标函数指示在考虑各巡检任务优先级的情况下机器人执行全部巡检任务的偏离时间最小;
28、求解模块,用于对所述目标函数进行求解,得到所述机器人的巡检规划方案,其中,所述巡检规划方案包括:各巡检任务的执行顺序。
29、可选地,所述表征模块包括:
30、第一子模块,用于基于各巡检目标的位置信息,确定各巡检目标间的距离;
31、第二子模块,用于基于所述机器人移动速度和各巡检目标间的距离,确定机器人从前一个巡检目标到达后一个巡检目标所耗时长;
32、第三子模块,用于依据完成各巡检目标所耗时长、机器人从前一个巡检目标达到后一个巡检目标所耗时长、所述机器人在初始位置的启动时间,表征各所述巡检任务的实际执行时间。
33、可选地,所述第三确定模块包括:
34、第四子模块,用于针对每个所述巡检任务,比对所述巡检任务的实际执行时间与所述巡检任务对应的期望任务执行时间区间的上限值、下限值之间的大小关系;
35、第五子模块,用于依据所述大小关系,确定所述巡检任务的偏离时间计算公式;
36、第六子模块,用于基于偏离时间计算公式、所述巡检任务的实际执行时间以及所述巡检任务对应的期望任务执行时间区间,计算所述机器人执行所述巡检任务的偏离时间。
37、可选地,所述第五子模块具体用于:
38、在所述巡检任务的实际执行时间大于所述巡检任务对应的期望任务执行时间区间的上限值的情况下,确定所述实际执行时间与所述上限值之差为所述巡检任务的偏离时间;
39、在所述巡检任务的实际执行时间小于所述巡检任务对应的期望任务执行时间区间的下限值的情况下,确定所述下限值与所述实际执行时间之差为所述巡检任务的偏离时间。
40、本发明实施例提供了一种电子设备,该电子设备包括处理器、存储器及存储在所述存储器上并可在所述处理器上运行的程序或指令,所述程序或指令被所述处理器执行时实现上述任意一种基于时间窗口的机器人巡检规划方法的步骤。
41、本发明实施例提供了一种可读存储介质,所述可读存储介质上存储程序或指令,所述程序或指令被处理器执行时实现上述任意一种基于时间窗口的机器人巡检规划方法的步骤。
42、本发明实施例提供的基于时间窗口的机器人巡检规划方案,确定机器人巡检规划参数;依据巡检规划参数和预设的巡检模块中包括的巡检任务的实际执行时间表达式,表征各巡检任务的实际执行时间;确定各巡检任务的优先级系数;针对每个巡检任务,依据巡检任务的实际执行时间和巡检任务对应的期望任务执行时间区间,确定机器人执行巡检任务的偏离时间;将各巡检任务对应的优先级系数、偏离时间输入预先构建的巡检规划模型的目标函数中;对目标函数进行求解,得到机器人的巡检规划方案。本发明实施例提供的机器人巡检规划方法,针对时间敏感场景的特点,通过巡检规划模型进行机器人巡检规划,保证各个巡检目标的执行时间落入对应的期望任务执行时间区间内,从而得到高效、可靠的机器人巡检规划方案。
- 还没有人留言评论。精彩留言会获得点赞!