基于事件触发机制的分布式多传感器多目标跟踪方法
本发明涉及目标跟踪,特别是涉及一种基于事件触发机制的分布式多传感器多目标跟踪方法。
背景技术:
1、随着电子信息技术的飞速发展,目标跟踪技术已成为民用和军用领域的研究热点,并得到了广泛的应用。在民用领域,目标跟踪在智能交通、视觉监视等方面有重要的实用价值;在军事领域,目标跟踪有利于在战场中精确跟踪敌方目标并进行打击。在复杂的跟踪环境中,对目标的实时精确跟踪并屏蔽外部因素的干扰一直是研究的难点和关键问题。目标跟踪技术在20世纪30年代提出,而后wax定义了多目标跟踪的概念,并初步将多目标跟踪技术应用于防空系统。根据不同的数学理论,常见的多目标跟踪技术分为两类:基于数据关联的跟踪策略和基于随机有限集的跟踪策略。
2、多目标跟踪技术往往需要基于硬件的无线传感器网络,由于无线传感器网络是由电池供电的,限制了传感器网络的连续工作时间;并且在电子战环境下,传感器之间的大规模数据传输会增加被敌人发现的可能性,降低传感器网络的生存能力;目标机动特性的不确定性会导致目标跟踪时存在丢包、间歇观测、噪声干扰、通信网络拥塞等问题。现有的多目标跟踪算法大多进行周期性的数据传递,能量消耗多且易被敌方发现。
技术实现思路
1、本发明的目的是提供一种基于事件触发机制的分布式多传感器多目标跟踪方法,能够在保证对多目标跟踪精度的同时,采用事件触发机制降低传感器网络能量消耗,提高传感器网络的隐蔽性。
2、为实现上述目的,本发明提供了如下方案:
3、一方面,本发明提供一种基于事件触发机制的分布式多传感器多目标跟踪方法,包括:
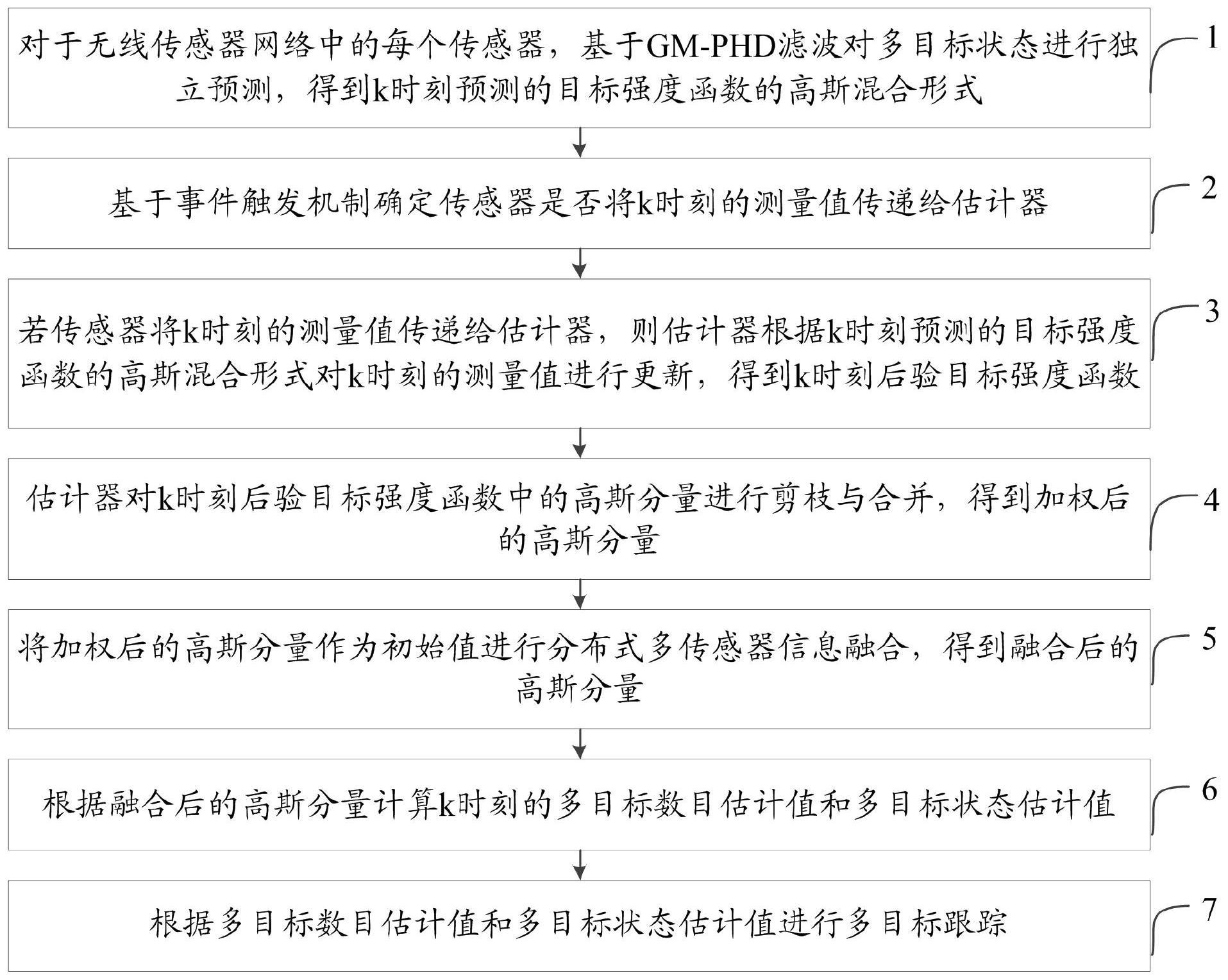
4、对于无线传感器网络中的每个传感器,基于gm-phd滤波对多目标状态进行独立预测,得到k时刻预测的目标强度函数的高斯混合形式;所述传感器与估计器分离且一一对应;
5、基于事件触发机制确定传感器是否将k时刻的测量值传递给估计器;
6、若所述传感器将k时刻的测量值传递给估计器,则估计器根据所述k时刻预测的目标强度函数的高斯混合形式对k时刻的测量值进行更新,得到k时刻后验目标强度函数;
7、估计器对所述k时刻后验目标强度函数中的高斯分量进行剪枝与合并,得到加权后的高斯分量;
8、将所述加权后的高斯分量作为初始值进行分布式多传感器信息融合,得到融合后的高斯分量;
9、根据所述融合后的高斯分量计算k时刻的多目标数目估计值和多目标状态估计值;
10、根据所述多目标数目估计值和多目标状态估计值进行多目标跟踪。
11、可选地,所述对于无线传感器网络中的每个传感器,基于gm-phd滤波对多目标状态进行独立预测,得到k时刻预测的目标强度函数的高斯混合形式,具体包括:
12、对于无线传感器网络中的每个传感器,基于gm-phd滤波对多目标状态进行独立预测,得到k时刻预测的目标强度函数的高斯混合形式
13、其中vk|k-1(xk)为k时刻预测的目标强度函数;vs,k|k-1(xk)为k时刻的生存目标强度函数;γk(xk)为k时刻的新生目标rfs的函数;vβ,k|k-1(xk)为k时刻的衍生目标强度函数;jk|k-1表示vk|k-1(xk)中高斯分量的个数;表示vk|k-1(xk)中的第i个高斯分量,其中xk为k时刻目标状态,为均值,为方差;为第i个高斯分量对应的权重。
14、可选地,所述基于事件触发机制确定传感器是否将k时刻的测量值传递给估计器,具体包括:
15、基于事件触发机制确定传感器l是否将k时刻的测量值传递给估计器;其中τk-1时刻是传感器l上一次触发的时刻;是传感器l在τk-1时刻的测量值中向量组成的矩阵;是传感器l在当前时刻k的测量值中的向量组成的矩阵;δ2×2是触发阈值矩阵。
16、可选地,述估计器根据所述k时刻预测的目标强度函数的高斯混合形式对k时刻的测量值进行更新,得到k时刻后验目标强度函数,具体包括:
17、估计器根据所述k时刻预测的目标强度函数的高斯混合形式对k时刻的测量值进行更新,得到k时刻后验目标强度函数其中(1-pd,k)vk|k-1(xk)为漏检目标强度函数;pd,k为探测概率;为检测到的目标强度函数;为k时刻检测到的目标强度函数的第i个高斯分量,其中为均值,为方差;为对应的权重。
18、可选地,所述估计器对所述k时刻后验目标强度函数中的高斯分量进行剪枝与合并,得到加权后的高斯分量,具体包括:
19、估计器根据公式对所述k时刻后验目标强度函数vk(xk;z)中的高斯分量进行剪枝,得到剪枝后的权重其中tth为剪枝阈值;
20、根据所述剪枝后的权重对vk(xk;z)中高斯分量进行合并,得到加权后的高斯分量。
21、一种基于事件触发机制的分布式多传感器多目标跟踪系统,包括:
22、多目标状态预测模块,用于对于无线传感器网络中的每个传感器,基于gm-phd滤波对多目标状态进行独立预测,得到k时刻预测的目标强度函数的高斯混合形式;所述传感器与估计器分离且一一对应;
23、事件触发机制模块,用于基于事件触发机制确定传感器是否将k时刻的测量值传递给估计器;
24、测量值更新模块,用于若所述传感器将k时刻的测量值传递给估计器,则估计器根据所述k时刻预测的目标强度函数的高斯混合形式对k时刻的测量值进行更新,得到k时刻后验目标强度函数;
25、高斯分量剪枝与合并模块,用于利用估计器对所述k时刻后验目标强度函数中的高斯分量进行剪枝与合并,得到加权后的高斯分量;
26、分布式多传感器信息融合模块,用于将所述加权后的高斯分量作为初始值进行分布式多传感器信息融合,得到融合后的高斯分量;
27、多目标状态估计模块,用于根据所述融合后的高斯分量计算k时刻的多目标数目估计值和多目标状态估计值;
28、多目标跟踪模块,用于根据所述多目标数目估计值和多目标状态估计值进行多目标跟踪。
29、另一方面,本发明还提供一种电子设备,包括存储器、处理器以及存储在所述存储器上并可在所述处理器上运行的计算机程序,所述处理器执行所述计算机程序时实现所述的基于事件触发机制的分布式多传感器多目标跟踪方法。
30、另一方面,本发明还提供一种非暂态计算机可读存储介质,其上存储有计算机程序,所述计算机程序被执行时实现所述的基于事件触发机制的分布式多传感器多目标跟踪方法。
31、根据本发明提供的具体实施例,本发明公开了以下技术效果:
32、本发明提供了一种基于事件触发机制的分布式多传感器多目标跟踪方法,所述方法包括:对于无线传感器网络中的每个传感器,基于gm-phd滤波对多目标状态进行独立预测,得到k时刻预测的目标强度函数的高斯混合形式;所述传感器与估计器分离且一一对应;基于事件触发机制确定传感器是否将k时刻的测量值传递给估计器;若所述传感器将k时刻的测量值传递给估计器,则估计器根据所述k时刻预测的目标强度函数的高斯混合形式对k时刻的测量值进行更新,得到k时刻后验目标强度函数;估计器对所述k时刻后验目标强度函数中的高斯分量进行剪枝与合并,得到加权后的高斯分量;将所述加权后的高斯分量作为初始值进行分布式多传感器信息融合,得到融合后的高斯分量;根据所述融合后的高斯分量计算k时刻的多目标数目估计值和多目标状态估计值;根据所述多目标数目估计值和多目标状态估计值进行多目标跟踪。本发明方法能够在保证对多目标跟踪精度的同时,采用事件触发机制降低传感器网络能量消耗,提高传感器网络的隐蔽性。
- 还没有人留言评论。精彩留言会获得点赞!