一种电动拖拉机多节点路径规划方法
本发明涉及电动拖拉机多节点路径规划领域,具体地是一种电动拖拉机多节点路径规划方法。
背景技术:
1、电动拖拉机具有低污染、低噪音、高效率、操作方便等优点,今年来,电动拖拉机多用于农业生产工作中,现在为了降低运行损耗和提升续航的能力采用多节点路径规划以便提升运行效率,而多节的路径规划是指在一定区域内存在多个节点,并从某一个节点出发,以设定的运行规则最优,遍历所有节点后的路径。
2、目前,多节点路径规划多采用只能算法进行规划路径,例如蚁群算法(ant colonyalgorithm,aco)、鲸鱼优化算法(whale optimization algorithm,woa)等,例如《计算机应用》中面向旅行商问题的蚁群算法改进一文中将其用于旅行商问题的求解,由于蚁群算法依据蚁群觅食行为与路径规划相似,因此蚁群算法是解决多节点路径规划的常用算法。将蚁群算法用于多节点路径规划问题时,需要设置多节点参数的迭代规则,但是蚁群算法需要很多参数,还会因为迭代终止次数的设定值过大导致迭代后期出现多次迭代次数相同的情况,降低了求解效率,但是迭代次数的终止次数也不能设定的过小,故很难确定参数的最佳拟合组合,所以这种算法很容易陷入局部最优解,从而影响最优路径的求解。
3、因蚁群算法存在的问题,也常用鲸鱼优化算法来求解多节点路径规划的最优解,鲸鱼优化算法虽然具有设置参数数量少、收敛性能强的优点,但是具有容易陷入局部最优和收敛精度低速度慢的缺点,虽然《计算机工程与应用》中的改进的鲸鱼优化算法及其应用和《计算机应用研究》中的混合策略改进鲸鱼优化算法通过改进鲸鱼算法优化了鲸鱼优化算法收敛能力,增强了初始解的多样性,但是没有解决收敛精度低和收敛速度慢的问题,反而因为运行逻辑的复杂性导致了算法的运行效率降低。
4、因为无法兼顾局部与全局搜索能力,导致路径长度大,能量消耗高的问题出现,故目前有部分电动拖拉机多节点路径规划的方法采用结合蚁群算法和基本粒子群算法(partricle swarm optimization,pso)来解决蚁群算法的问题,但是对于蚁群算法迭代次数过大导致效率降低的问题和鲸鱼优化算法收敛速度慢的问题没有很好地解决,对于地形数据也有一定的依赖。
技术实现思路
1、本发明提供一种收敛速度快、收敛精度高、兼顾多种地形下局部与全局搜索能力的电动拖拉机多节点路径规划方法,尤其适合用于农业生产的电动拖拉机的多节点路径规划工作。本发明所要解决的技术问题是:蚁群算法迭代次数过大导致效率降低的问题和鲸鱼优化算法收敛速度慢的问题,并且优化后的算法无法很好的在多种地形下平衡全局与局部搜索。
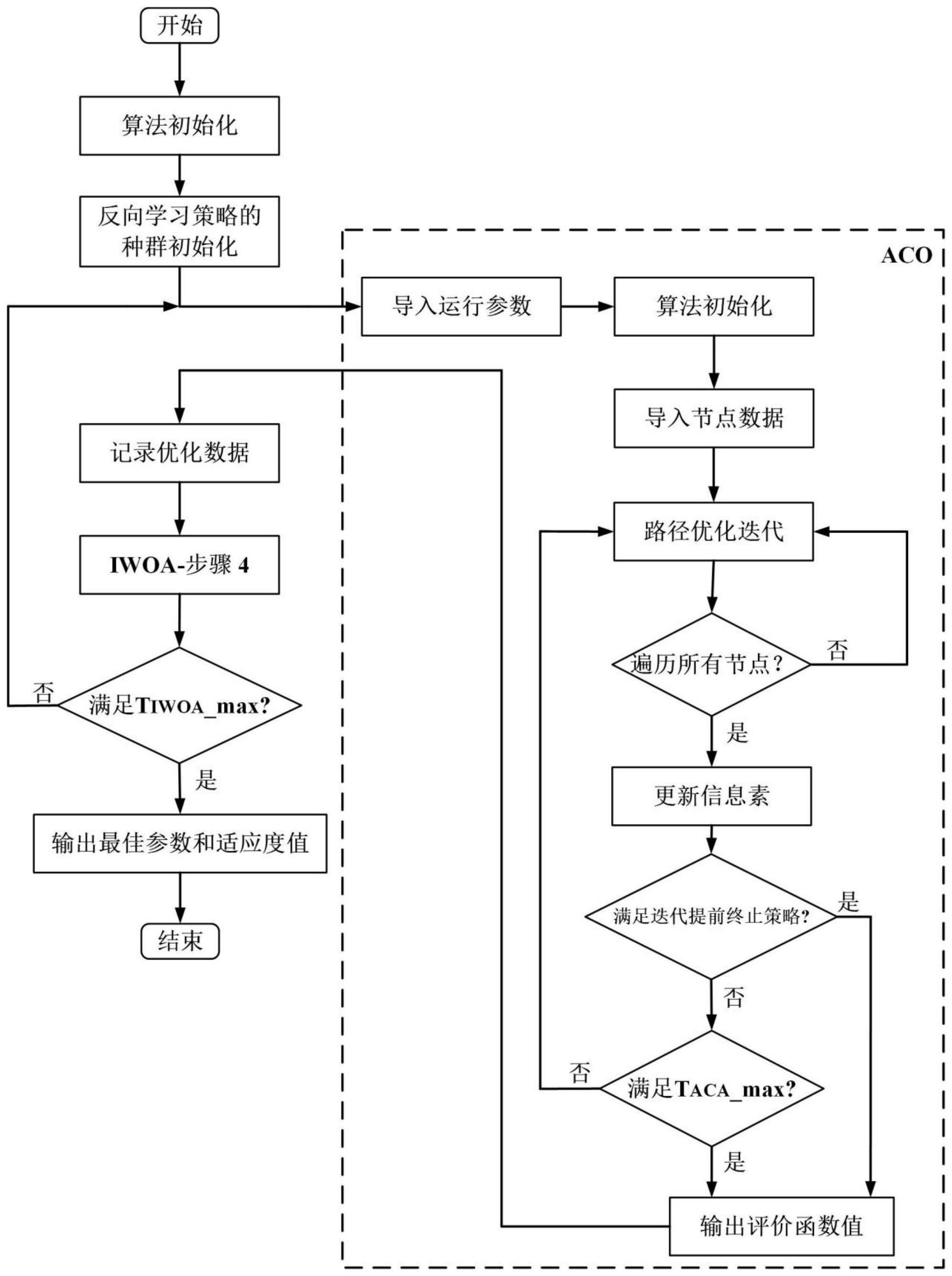
2、本发明所采取的技术方案是:一种电动拖拉机多节点路径规划方法,方法为融合改进鲸鱼-蚁群算法,利用改进鲸鱼算法得到改进蚁群算法的运行参数,将运行参数代入改进蚁群算法求解多节点最优路径,将改进蚁群算法求解多节点最优路径的结果放入改进鲸鱼算法的迭代中,在改进鲸鱼算法中设置评价函数,通过改进鲸鱼算法的评价函数对改进蚁群算法的结果进行评价,工作流程为:
3、第一步,初始化算法,并导入数据;
4、第二步,将导入的数据通过改进鲸鱼算法中反向学习策略的种群初始化算法进行运算;
5、第三步,将运算结果输入改进蚁群算法中作为运行参数,改进蚁群算法初始化;
6、第四步,导入节点数据进行路径优化迭代运算;
7、第五步,判断路径优化迭代的运算结果是否遍历所有节点,路径优化迭代运算结果没有遍历所有节点就返回第四步,路径优化迭代运算结果遍历所有节点就更新信息素;
8、第六步,将更新的信息素导入改进蚁群算法的引入迭代提前终止策略的算法中判断是否满足迭代提前终止策略,满足迭代终止策略的条件便通过评价函数计算并输出评价函数值,不满足迭代提前终止策略的条件便判断改进蚁群算法中引入提前终止策略算法的迭代次数是否达到最大值,迭代次数达到最大值就通过评价函数计算并输出评价函数值,迭代次数没有达到最大值就将改进蚁群算法当前的迭代结果作为参数返回第四步;
9、第七步,将记录的优化数据导入改进鲸群算法的步骤四记录评价函数值并将评价函数最优的个体位置定位最优位置,并继续改进鲸鱼算法的后续步骤;
10、第八步,判断第七步中改进鲸群算法的迭代次数是否达到最大迭代次数,迭代次数达到最大迭代次数就输出最佳参数和适应度值并终止运算,适应度值为评价函数值,迭代次数没有达到最大迭代次数就返回第三步并将第七步中改进鲸群算法的结果参数输入第三步作为运行参数;
11、进一步的,所述第一步中导入数据包括改进蚁群算法变量和改进鲸鱼算法变量,改进蚁群算法变量包括信息素重要程度因子、启发函数重要程度因子、信息素浓度挥发因子和蚁群蚂蚁数量,改进鲸鱼算法变量包括鲸鱼种群数量和最大迭代次数。
12、进一步的,所述改进蚁群算法中引入迭代终止策略的算法流程为:
13、第一步,导入迭代数据;
14、第二步,判断最近两次迭代数据是否相同,不相同时迭代解连续相同的次数设为零并继续进行迭代,最近两次迭代数据相同时迭代解连续相同次数加一;
15、第三步,判断迭代解连续相同次数是否大于等于迭代解连续相同次数设定值,小于迭代解连续相同够次数设定值则继续迭代,大于等于迭代解连续相同次数设定值则进入下一步;
16、第四步,判断迭代解是否小于等于迭代解设定值,迭代解大于迭代解设定值则继续迭代,迭代解小于等于设定值则终止迭代且输出解。
17、进一步的,改进鲸群算法的步骤为:
18、步骤一:确定改进蚁群算法的变量种类、种群个体数量、最大迭代次数;
19、步骤二:在变量取值范围内随机初始化种群;
20、步骤三:通过引入反向学习策略来确立初始化种群,
21、步骤四:记录评价函数值最优的个体位置为最优位置;
22、步骤五:基于包围捕食搜索机制、螺旋上升机制或随机搜索机制完成个体的位置更新,引入随机变量p=rand(0,1),当p<0.5且|a|<1,个体按照包围捕食搜索机制更新位置,当p<0.5且|a|≥1,个体按照随机搜索机制更新位置,当p≥0.5,个体按照螺旋上升机制更新位置。
23、进一步的,所述包围捕食搜索机制公式如下:
24、d=|cx*(t)-x(t)|
25、x(t+1)=wx*(t)-ad
26、
27、a=2ar-a=a(2r-1)
28、c=2r
29、
30、式中,t为当前迭代次数,x为当前位置,x*为最佳位置,a和c为系数向量,r为随机变量且范围为[0,1],a非线性收敛因子,tmax为最大迭代次数,w为自适应惯性权重因子,d为最佳位置与当前位置的差值,
31、所述螺旋上升机制公式为:
32、x(t+1)=deblcos(2πl)+wx*(t)
33、式中,b为常量,l为随机变量且范围为[0,1],t为当前迭代次数,x为当前位置,x*为最佳位置
34、所述随机搜索机制公式为:
35、d*=|cxrand(t)-x(t)|
36、x(t+1)=xrand(t)-ad*
37、式中,xrand(t)为在种群中随机选择的位置。
38、进一步的,反向学习策略的种群初始化算法确立种群初始化的方法为:
39、第一步,建立随机初始种群,对随机初始种群中的个体依次分析;
40、第二步,引入随机数p,p≥0.3进行反向学习,p<0.3不进行反向学习直接确定为最终初始种群;
41、反向学习的公式为:
42、
43、式中,k为角标序号,取值范围最小为1,最大为改进蚁群算法的变量种类个数,lk和uk为种群空间边界,xr为个体r在d维空间中的位置,为xr对应的反向个体,
44、蚂蚁数量边界:l1=20~30,u1=80~90,
45、信息素挥发因子边界:l2=0.2~0.25,u2=0.75~0.8,
46、启发函数重要程度因子边界:l3=1~2,u3=5~6,
47、信息素重要程度因子边界:l4=0.3~0.5,u4=2~2.5,
48、计算xr和的评价函数值,保留评价函数值高的为最终初始种群。
49、进一步的,改进蚁群算法选择路径的状态转移函数公式为:
50、
51、更新信息素公式:taij(taca)=(1-rh)taij(taca-1)+δtaij(taca)
52、式中参数为信息素更新参数,更新为迭代更新
53、
54、式中:taca为当前迭代次数,为状态转移函数,taij(taca)为信息素浓度,α为信息素重要程度因子,etij(taca)为启发函数,β为启发函数重要程度因子,rh为信息素浓度挥发因子,δtaij(taca)为路径上信息素的新增量,与是否经过该路径有关,disij为经过路径的欧氏距离,i和j为节点,allow表示尚未被途经的节点。
55、进一步的,评价函数反映改进蚁群算法求解多节点路径规划的目标函数最优性、快速收敛性和算法稳定性,评价函数的公式为:
56、y=k1f1+k2f2+k3f3+k4f4
57、f1=length-length_min
58、f2=energy-energy_min
59、f3=σlength
60、f4=σ(length)
61、式中:length为改进蚁群算法求解路径长度值,length_min为路径长度经验最优值,energy为改进蚁群算法求解路径消耗能量值,energy_min为路径消耗能量经验最优值,f1为改进蚁群算法求解路径长度值与经验最优值的差值,f2为改进蚁群算法求解消耗能量值与经验最优值的差值,f1和f2表述算法求解目标函数的最优性,f3为改进蚁群算法的迭代数,表述算法的快速收敛性,f4为改进蚁群算法迭代数据标准差,表述算法迭代数据的稳定性,k1、k2、k3、k4为权重系数。
62、采用以上结构后,具有以下有益效果:
63、1、由于同时优化了鲸鱼算法和蚁群算法,并且将改进蚁群算法放入了改进鲸鱼算法的迭代中,利用改进蚁群算法的迭代提前终止策略克服了迭代次数过多的问题,从而提高了算法效率,并且通过改进鲸鱼算法中反向学习策略的种群初始化算法提高了初始种群质量,从而提高了算法的收敛速度与精度,
64、2、由于引入非线性收敛因子避免算法过早由全局搜索转向局部搜索,克服了算法陷入局部最优解的问题,由于引入了自适应惯性权重因子,克服了鲸鱼优化算法中易陷入局部最优解的问题,从而增强了迭代前期算法的全局搜索能力,迭代后期自适应权重因子较小降低了个体对当前最优解的依赖,避免算法陷入局部最优解,
65、3、由于融合改进鲸鱼-蚁群算法引入迭代提前终止策略、反向学习策略的种群初始化、非线性收敛因子、自适应权重因子,克服了过多的迭代、局部与全局的不平衡、收敛精度和效率低的问题,提高了收敛速度和收敛精度,规划的路径有效降低了能量损耗和减少了路径距离,平衡了不同路面环境下的局部与全局搜索能力。
- 还没有人留言评论。精彩留言会获得点赞!