一种智能制造装配生产线控制系统及控制方法与流程
本发明涉及数字孪生,具体为一种智能制造装配生产线控制系统及控制方法。
背景技术:
1、指尖陀螺是一种中心对称结构、可以在手指上空转的小玩具,它是由一个双向或多向的对称体作为主体,在主体中间嵌入一个轴承的设计组合,整体构成一个可平面转动的物品。它的加工过程比较简单,重点在装配工艺,例如中国专利文献cn202110057439.8公开的一种指尖陀螺自动装配设备,包括工作台;转台;主转轮上料组件;副转轮上料组件;上旋帽旋装组件;下料组件;通过对指尖陀螺的主转轮上料、副转轮上料、上旋帽上料以及对其进行自动的装配、下料,保证了指尖陀螺自动装配的不断进行。但是上述控制系统只能根据预先设定进行,当一种原材料出现短缺或者生产计划出现改变,设备只能停止运行,或者依赖于人工现场操作控制,不能实时监控生产的过程和数据,也不能灵活调节生产计划,由此,还不足以满足更高的实用性需求。
技术实现思路
1、为了解决上述技术问题,本发明提出了一种智能制造装配生产线控制系统及控制方法。以解决现有指尖陀螺装配生产线及控制系统,只能根据预先设定进行,当一种原材料出现短缺或者生产计划出现改变,设备只能停止运行,或者依赖于人工现场操作控制,不能实时监控生产的过程和数据,也不能灵活调节生产计划的问题。
2、本发明所要解决的技术问题采用以下技术方案来实现:
3、一种智能制造装配生产线控制系统,包括用于储存指尖陀螺原料的原材料及成品的立体仓库、用于放置指尖陀螺零部件及成品的工装板、用于从立体库中取放工装板的出入库六轴机器人、用于接收传递托盘的第一接驳输送线,还包括:
4、总控台,所述总控台上包含用于控制整条生产线的控制系统、人机交互触摸屏、运行物联网平台的主机;
5、铆压工作台,所述铆压工作台上包含用于安装指尖陀螺配重块的铆压机、用于搬运指尖陀螺的铆压六轴机器人、用于切换工具的第一快换系统、用于存放工具的铆压支架、用于展示数字孪生系统的主机、用于定位接收传递工装板的第二接驳输送线;
6、打螺丝工作台,所述打螺丝工作台上包含用于供应螺丝的供料机、用于夹持指尖陀螺零部件的第二快换系统、用于搬运指尖陀螺的打螺丝六轴机器人、用于存放工具的打螺丝支架、用于展示数字孪生系统的主机、用于定位接收传递工装板的第三接驳输送线;
7、激光打标工作台,所述激光打标工作台上包含用于在指尖陀螺表面打印标签的激光打标机、用于检测结果的工业相机、用于吸取并搬运指尖陀螺的激光打标六轴机器人、用于展示数字孪生系统的主机、用于定位接收传递工装板的第四接驳输送线;
8、成品装盒工作台,所述成品装盒工作台上包含用于存放盒子的平面仓库、用于搬运指尖陀螺的成品装盒六轴机器人、用于存放工具的成品装盒支架、用于展示数字孪生系统的主机、用于定位接收传递工装板的第五接驳输送线;
9、智能运输agv,所述智能运输agv用于将从所述立体仓库取出的工装板运输至各工作台上进行加工,并在加工结束后取走,转运至下一目标;
10、物联网平台,用于指尖陀螺装配过程中设备数据采集,并将采集的实时数据传输到所述数字孪生系统内,基于所述指尖陀螺装配线数字孪生平台对物料状态、装配进度、设备运行效率、agv小车位置进行模拟、显示、预测,并根据原料变化和订单变化,实时反馈物联网平台调整生产安排;
11、数字孪生系统,用于搭建与实际生产线相符合的三维模型,并通过与控制系统通信连接,将实时数据通过模型变化展示出来。
12、优选地,所述立体仓库上的每个仓位均带有用于检测有无原料的微动开关,所述第一接驳输送线上设置有顶升气缸以及检测所述智能运输agv到达接驳位置的传感器,所述出入库六轴机器人上安装有带有定位销的托爪。
13、优选地,所述第二快换系统分为夹持指尖陀螺零部件的夹爪工具、夹持指尖陀螺旋转体的夹爪工具、吸取指尖陀螺配重块及轴承盖的吸盘工具。
14、优选地,所述用于展示数字孪生系统的主机为数字孪生工厂软件运行载体,每个实训台上的主机展示对应实训台的数字孪生系统。
15、优选地,所述物联网平台采用mes系统,mes系统通过数字线程接收和反馈数据。
16、一种智能制造装配生产线控制方法,应用上述的一种智能制造装配生产线控制系统,包括以下步骤:
17、步骤(s1)确定指尖陀螺装配的关键特征,基于所述关键特征构建指尖陀螺装配线数字孪生系统;
18、步骤(s2)通过构建物联网平台对指尖陀螺装配过程进行数据采集,并将采集到的实时数据传输到所述指尖陀螺装配线数字孪生系统内,所述指尖陀螺装配线数字孪生系统对指尖陀螺装配生产线的物料状态、装配进度、设备运行效率、agv小车位置进行模拟、显示、预测;
19、步骤(s3)基于所述指尖陀螺装配线数字孪生系统,根据原料变化和订单变化,实时反馈物联网平台调整生产安排。
20、优选地,步骤(s1)中关键特征包括物料清单信息、订单信息、各工艺流程时间、各工作台运行状态、智能运输agv状态、成品入库信息。
21、优选地,步骤(s3)具体为:
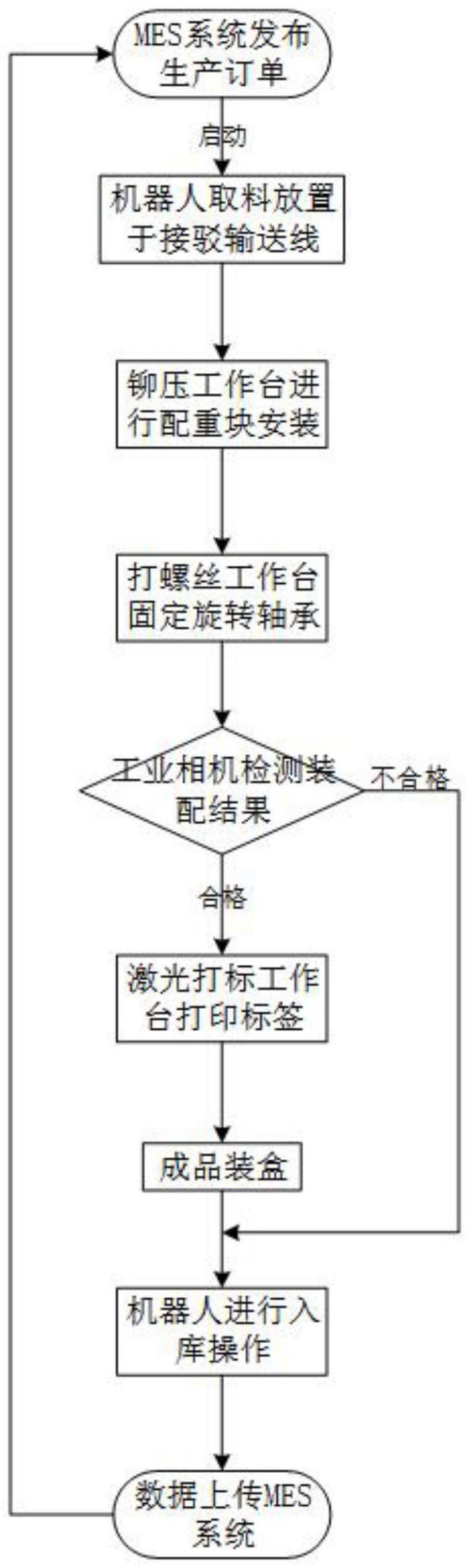
22、步骤(s31)由物联网平台发出实时生产指令,启动出入库六轴机器人,将装有原材料的工装板从立体库上的指定仓位中取走,并摆放至第一接驳输送线;
23、步骤(s32)立体库中携带原材料的工装板余量通过识别传感器识别,识别信号变动,反馈物联网平台携带原材料的工装板增减,识别信号消失,反馈物联网平台相应库位工装板被取走,呼叫空闲的智能运输agv到第一接驳输送线处取走装有原材料的工装板,转运至铆压工作台开始加工;
24、步骤(s33)加工结束后,铆压工作台反馈物联网平台,呼叫空闲的智能运输agv取走装有铆压好的指尖陀螺的工装板,转运至打螺丝工作台进行装配加工;
25、步骤(s34)加工结束后,打螺丝工作台反馈物联网平台,呼叫空闲的智能运输agv取走装有装配好的指尖陀螺的工装板,转运至激光打标工作台对装配好的指尖陀螺进行视觉检测、激光打标;
26、步骤(s35)激光打标结束后,激光打标工作台反馈物联网平台,呼叫空闲的智能运输agv取走装有激光打标好的指尖陀螺的工装板,转运至成品装盒工作台进行装盒操作;
27、步骤(s36)装盒结束后,成品装盒工作台反馈物联网平台,物联网平台上成品入库信息相应成品加一,同时呼叫空闲的智能运输agv取走装有装盒好的指尖陀螺的工装板,转运至立体仓库处的第一接驳输送线,由出入库六轴机器人进行成品入库操作;
28、步骤(s37)若有新的加工订单,则出入库六轴机器人再次进行取料动作,并由智能运输agv进行接收转运;若无任务,智能运输agv返回充电点充电等待。
29、本发明的有益效果是:
30、本发明通过将指尖陀螺装配工序拆分至多个工作台,搭配用于将带有原材料的工装板转运至各工作台及立体仓库的智能运输agv,基于指尖陀螺装配的关键特征构建的装配线数字孪生系统,物联网平台用于指尖陀螺装配过程的数据采集,并将采集的实时数据传输到所述数字孪生系统内,基于所述指尖陀螺装配线数字孪生平台对物料状态、装配进度、设备运行效率、agv小车位置进行模拟、显示、预测,并根据原料变化和订单变化,实时反馈物联网平台调整生产安排。物联网平台生成订单,启动机器人取料,立体仓库中携带原材料的工装板余量通过识别传感器识别,识别信号变动,反馈物联网平台携带原材料的工装板增减,识别信号消失,反馈物联网平台相应库位工装板被取走,呼叫空闲的智能运输agv到接驳输送线处取走工装板,转运至铆压工作台开始加工;加工结束后,铆压工作台反馈物联网平台,呼叫空闲的智能运输agv取走工装板,转运至打螺丝工作台进行装配加工;加工结束后,打螺丝工作台反馈物联网平台,呼叫空闲的智能运输agv取走工装板,转运至激光打标工作台进行加工;加工结束后,激光打标工作台反馈物联网平台,呼叫空闲的智能运输agv取走工装板,转运至成品装盒工作台进行装盒操作;装盒结束后,成品装盒工作台反馈物联网平台,呼叫空闲的智能运输agv取走工装板,转运至立体仓库处的接驳输送线,由机器人进行成品入库操作。智能分配资源,提高生产效率提供基础,根据原料变化和订单变化,实时反馈mes系统调整生产安排,提供更高效率的生产方案,也可以事先通过数字孪生系统的模型结合mes系统累积的数据进行模拟,对之后实际生产的情况和发展有比较清楚的认知,有助于企业的成本核算和规划。
- 还没有人留言评论。精彩留言会获得点赞!