一种车辆编队控制方法、装置、电子设备及存储介质与流程
本发明涉及汽车领域,尤其涉及一种车辆编队控制方法、装置、电子设备及存储介质。
背景技术:
1、道路运输系统是国家经济繁荣的支柱,为国内和国际贸易提供可靠的客运和货运运输。然而,道路运输系统中车祸事故频发,因而需要将自动化引入道路运输系统中,以通过车辆间的无线通信,提高运输的安全性和移动效率。通过车辆之间的信息共享,协同自适应巡航控制,可以实现车辆编队的自动驾驶控制。
2、现在的利用比例积分微分控制的车辆编队控制方法,仅仅考虑输入时滞带来的误差,因而导致车距控制不准确。
技术实现思路
1、针对现有技术存在的缺陷,本公开实施例提供一种车辆编队控制方法、装置、电子设备及存储介质,可以在设计控制器的时候考虑通讯时滞,以提高反馈控制的准确度。
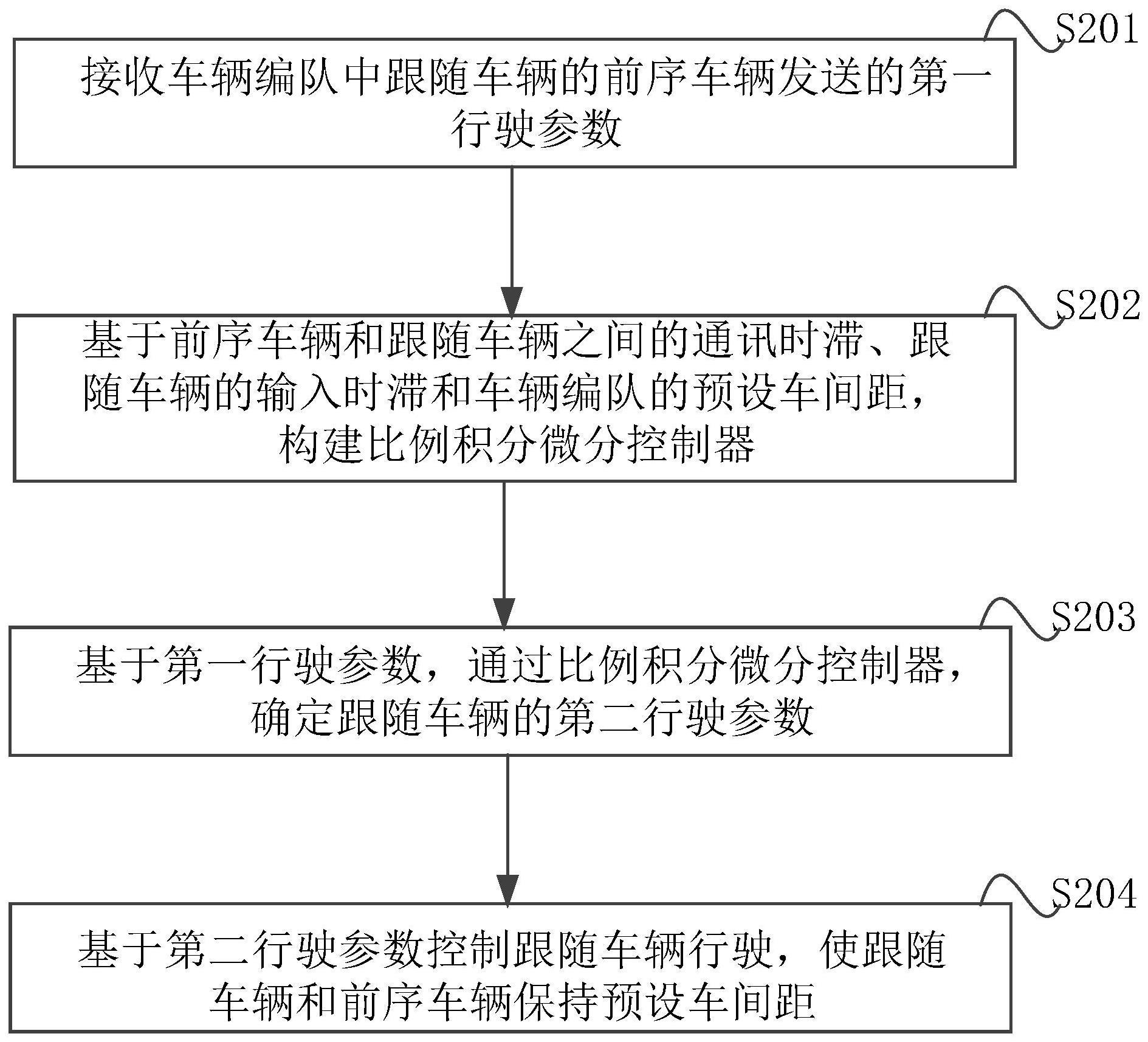
2、本申请实施例提供一种车辆编队控制方法,应用于车辆编队中的跟随车辆,方法包括:接收车辆编队中跟随车辆的前序车辆发送的第一行驶参数;基于前序车辆和跟随车辆之间的通讯时滞、跟随车辆的输入时滞和车辆编队的预设车间距,构建比例积分微分控制器;通讯时滞表征通讯导致第一行驶参数的误差时间,输入时滞表征跟随车辆对控制效果的反应时间;基于第一行驶参数,通过比例积分微分控制器,确定跟随车辆的第二行驶参数;基于第二行驶参数控制跟随车辆行驶,使跟随车辆和前序车辆保持预设车间距。
3、可选的,车辆编队中的领导车辆为静止状态或者匀速行驶状态;领导车辆为行驶在车辆编队中的第一辆车辆。
4、可选的,基于前序车辆和跟随车辆之间的通讯时滞、跟随车辆的系统时滞和车辆编队的预设车间距,构建比例积分微分控制器,包括:基于预设条件确定比例积分微分控制器的控制参数;基于通讯时滞、系统时滞、预设车间距和控制参数,构建比例积分微分控制器。
5、可选的,基于预设条件确定比例积分微分控制器的控制参数,包括:确定比例积分微分控制器的开环传递函数的相位函数和幅值函数;相位函数和幅值函数的参数包括控制参数;确定相位条件和幅值条件;确定使相位函数满足相位条件,且使幅值函数满足幅值条件的控制参数。
6、可选的,相位条件包括:相位函数的预设输出值大于预设相位;幅值条件包括:第一穿越频率下的幅值函数大于预设幅值,第二穿越频率下的幅值函数小于预设幅值;第一穿越频率和第二穿越频率下的相位函数为预设相位。
7、可选的,相位条件包括:相位函数的预设输出值大于预设相位,目标频率小于第二穿越频率;目标频率下的幅值函数为幅值函数的预设输出值,第一穿越频率和第二穿越频率下的相位函数为预设相位;幅值条件包括:第一穿越频率下的幅值函数大于预设幅值,第二穿越频率下的幅值函数小于预设幅值。
8、可选的,车辆编队的拓扑结构为前继-领导跟随拓扑结构,跟随车辆用于和车辆编队的领导车辆以及前序车辆通讯;领导车辆为行驶在车辆编队中的第一辆车辆。
9、相应地,本申请实施例提供一种车辆编队控制装置,应用于车辆编队中的跟随车辆,装置包括:接收模块,用于接收车辆编队中跟随车辆的前序车辆发送的第一行驶参数;构建模块,用于基于前序车辆和跟随车辆之间的通讯时滞、跟随车辆的输入时滞和车辆编队的预设车间距,构建比例积分微分控制器;通讯时滞表征通讯导致第一行驶参数的误差时间,输入时滞表征跟随车辆对控制效果的反应时间;参数模块,用于基于第一行驶参数,通过比例积分微分控制器,确定跟随车辆的第二行驶参数;控制模块,用于基于第二行驶参数控制跟随车辆行驶,使跟随车辆和前序车辆保持预设车间距。
10、可选的,车辆编队中的领导车辆为静止状态或者匀速行驶状态;领导车辆为行驶在车辆编队中的第一辆车辆。
11、可选的,构建模块用于:基于预设条件确定比例积分微分控制器的控制参数;基于通讯时滞、系统时滞、预设车间距和控制参数,构建比例积分微分控制器。
12、可选的,参数模块用于:确定比例积分微分控制器的开环传递函数的相位函数和幅值函数;相位函数和幅值函数的参数包括控制参数;确定相位条件和幅值条件;确定使相位函数满足相位条件,且使幅值函数满足幅值条件的控制参数。
13、可选的,相位条件包括:相位函数的预设输出值大于预设相位;幅值条件包括:第一穿越频率下的幅值函数大于预设幅值,第二穿越频率下的幅值函数小于预设幅值;第一穿越频率和第二穿越频率下的相位函数为预设相位。
14、可选的,相位条件包括:相位函数的预设输出值大于预设相位,目标频率小于第二穿越频率;目标频率下的幅值函数为幅值函数的预设输出值,第一穿越频率和第二穿越频率下的相位函数为预设相位;幅值条件包括:第一穿越频率下的幅值函数大于预设幅值,第二穿越频率下的幅值函数小于预设幅值。
15、可选的,车辆编队的拓扑结构为前继-领导跟随拓扑结构,跟随车辆用于和车辆编队的领导车辆以及前序车辆通讯;领导车辆为行驶在车辆编队中的第一辆车辆。
16、相应地,本申请实施例提供一种电子设备,电子设备包括处理器和存储器,存储器中存储有至少一条指令、至少一段程序、代码集或指令集,至少一条指令、至少一段程序、代码集或指令集由处理器加载并执行以实现上述的车辆编队控制方法。
17、相应地,本申请实施例提供一种计算机可读存储介质,存储介质中存储有至少一条指令、至少一段程序、代码集或指令集,至少一条指令、至少一段程序、代码集或指令集由处理器加载并执行以实现上述的车辆编队控制方法。
18、本申请实施例具有如下有益效果:通过针对输入时滞以及通讯时滞设计控制器,在处理通讯时滞时,能够反映真实的系统特性,从而车辆编队控制的可实践性强,且控制效果佳。
技术特征:
1.一种车辆编队控制方法,其特征在于,应用于车辆编队中的跟随车辆,所述方法包括:
2.根据权利要求1所述的一种车辆编队控制方法,其特征在于,所述车辆编队中的领导车辆为静止状态或者匀速行驶状态;所述领导车辆为行驶在所述车辆编队中的第一辆车辆。
3.根据权利要求2所述的一种车辆编队控制方法,其特征在于,所述基于所述前序车辆和所述跟随车辆之间的通讯时滞、所述跟随车辆的系统时滞和所述车辆编队的预设车间距,构建比例积分微分控制器,包括:
4.根据权利要求3所述的一种车辆编队控制方法,其特征在于,所述基于预设条件确定所述比例积分微分控制器的控制参数,包括:
5.根据权利要求4所述的一种车辆编队控制方法,其特征在于,所述相位条件包括:所述相位函数的预设输出值大于预设相位;
6.根据权利要求4所述的一种车辆编队控制方法,其特征在于,所述相位条件包括:所述相位函数的预设输出值大于预设相位,目标频率小于第二穿越频率;所述目标频率下的所述幅值函数为所述幅值函数的预设输出值,第一穿越频率和所述第二穿越频率下的所述相位函数为所述预设相位;
7.根据权利要求1所述的一种车辆编队控制方法,其特征在于,所述车辆编队的拓扑结构为前继-领导跟随拓扑结构,所述跟随车辆用于和所述车辆编队的领导车辆以及所述前序车辆通讯;所述领导车辆为行驶在所述车辆编队中的第一辆车辆。
8.一种车辆编队控制装置,其特征在于,应用于车辆编队中的跟随车辆,所述装置包括:
9.一种电子设备,其特征在于,所述电子设备包括处理器和存储器,所述存储器中存储有至少一条指令、至少一段程序、代码集或指令集,至少一条指令、至少一段程序、代码集或指令集由处理器加载并执行以实现权利要求1-7任意一项的车辆编队控制方法。
10.一种计算机可读存储介质,其特征在于,所述存储介质中存储有至少一条指令、至少一段程序、代码集或指令集,至少一条指令、至少一段程序、代码集或指令集由处理器加载并执行以实现如权利要求1-7任意一项的车辆编队控制方法。
技术总结
本申请实施例提供一种车辆编队控制方法、装置、电子设备及存储介质,应用于车辆编队中的跟随车辆,方法包括:接收车辆编队中跟随车辆的前序车辆发送的第一行驶参数;基于前序车辆和跟随车辆之间的通讯时滞、跟随车辆的输入时滞和车辆编队的预设车间距,构建比例积分微分控制器;基于第一行驶参数,通过比例积分微分控制器,确定跟随车辆的第二行驶参数;基于第二行驶参数控制跟随车辆行驶,使跟随车辆和前序车辆保持预设车间距。通过本申请实施例的一种车辆编队控制方法,可以在设计控制器的时候考虑通讯时滞,以提高车辆编队反馈控制的准确度。
技术研发人员:张振林,孙李,王东科
受保护的技术使用者:中汽创智科技有限公司
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!