一种智能家居设备控制方法
本发明涉及设备控制领域,具体涉及到一种智能家居设备控制方法。
背景技术:
1、目前行业内大部分的智能家居设备的动作逻辑为以相关的传感器的感应信号进行触发,例如,在卫生间的门上设置门窗传感器可对卫生间的门进行开关监控,用户可根据自身需求在门关上或打开时触发相应的智能家居设备执行预设的动作,基于现有智能家居设备的动作逻辑可知,目前智能家居设备的智能程度取决于传感器的规模以及动作逻辑设计的合理性。
2、在实际应用中,在很多时候,相同的传感器触发信号的组合会对应用户不同的意图,例如,用户进入洗手间,会对应触发洗手间门的门窗传感器的信号,如果用户需要洗手,可能需要亮起灯镜的,打开智能水龙头;如果用户需要如厕,需要提前对智能马桶盖进行加热;由此可见,在该条件下,无法判断用户是仅需要洗手,还是仅需要如厕,这就会导致相关的智能家居设备的动作不具有针对性;进一步的,即使在灯镜前和马桶旁分别加装人体感应器,在此条件上,也无法判断用户究竟洗手的时长,如厕是大便还是小便。
3、虽然理论上设置足够规模的传感器能够充分感知用户的实际行为需求,但在实际操作中,受限于经济成本和安装环境,还是有许多方面不能很好的满足用户的需求。
4、根据对智能家居设备的消费用户的进行问卷调查的结果显示,消费用户更希望智能家居设备能够理解用户的实际意图,实现更智能的动作。
技术实现思路
1、为了提高智能家居设备的智能性,本发明实施例提供了一种智能家居设备控制方法,结合时间条件,利用训练好的神经网络对目标用户在目标住所内的位置进行预测并生成预测轨迹逆序列,以此为基础预测出将要发生的事件,最终根据事件的预测结果对相应的智能家居设备进行动作控制,从而得到更为符合用户智能化需求的智能家居设备。
2、相应的,本发明提供了一种智能家居设备控制方法,包括:
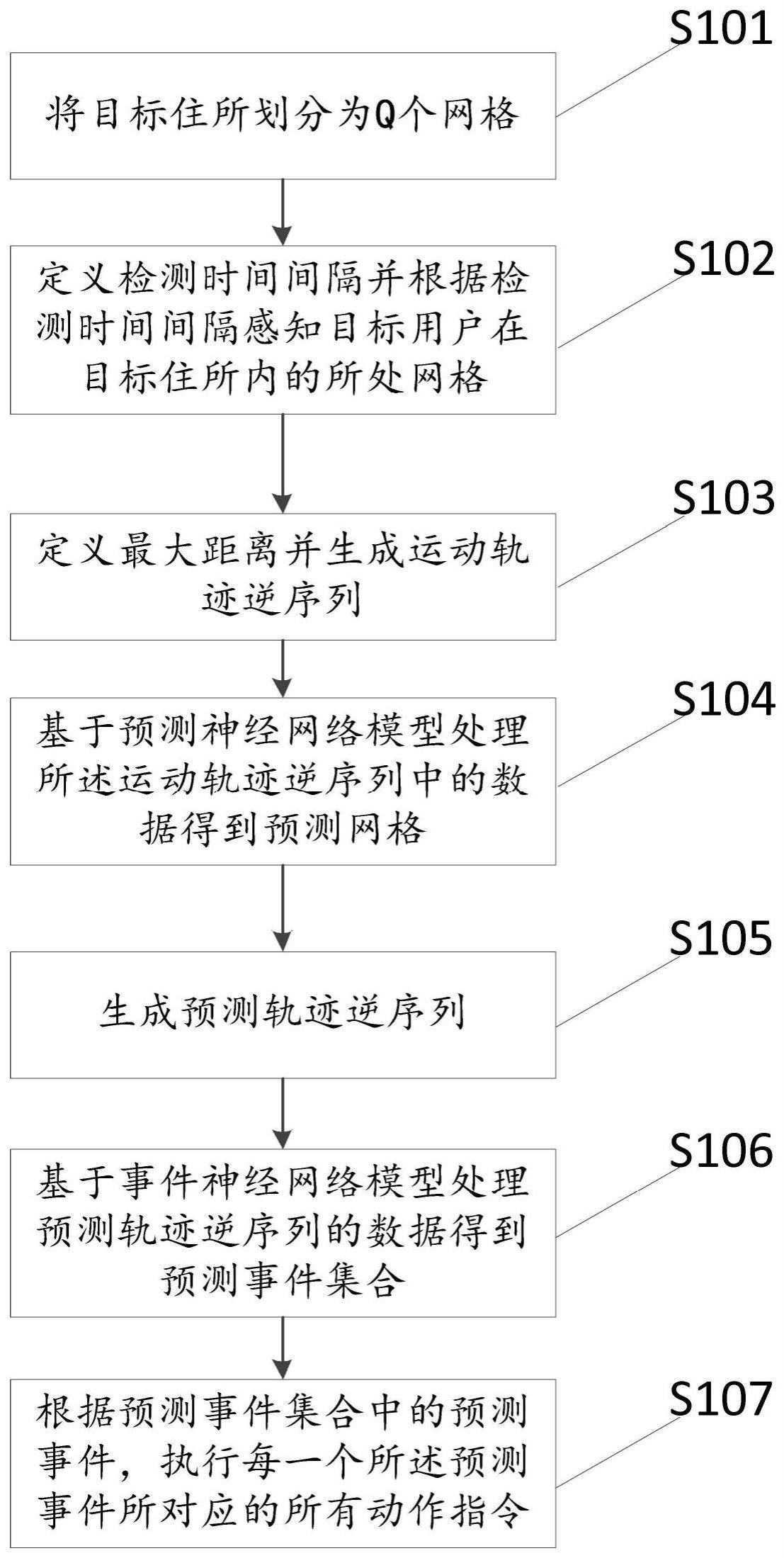
3、将目标住所划分为q个网格,第q个网格坐标表示为(xq,yq),q=1,2,…,q,每一个所述网格具有对应的事件神经网络模型;
4、定义检测时间间隔a并根据所述检测时间间隔a感知目标用户在所述目标住所内的所处网格et,t为实时时间,a为正数,所述实时时间t具有对应的预测神经网络模型rt';
5、定义最大距离a并生成运动轨迹逆序列α={e1=et,e2=et-a,…,ea=et-(a-1)a},a为正整数;
6、基于所述预测神经网络模型rt'处理所述运动轨迹逆序列α中的数据得到预测网格s(xs,ys),s∈1,2,…,q,所述预测网格s对应的事件神经网络模型为us';
7、生成预测轨迹逆序列β={p1=s,p2=et,p3=et-a,…,pa=et-(a-2)a};
8、基于所述事件神经网络模型us'处理所述预测轨迹逆序列β的数据得到预测事件集合v,所述预测事件集合v包括n个预测事件,每一个所述预测事件对应有m个有关智能家居设备的动作指令,n为自然数,m为正整数;
9、根据所述预测事件集合v中的n个预测事件,执行每一个所述预测事件所对应的所有动作指令。
10、可选的实施方式,所述检测时间间隔a≥0.5s。
11、可选的实施方式,所述最大距离a≤2q。
12、可选的实施方式,基于射频定位技术、zigbee定位技术、wifi定位技术、rfid定位技术、uwb定位技术中的其中一种或多种技术感知目标用户在所述目标住所内的所处网格et。
13、可选的实施方式,所述预测神经网络模型rt'为长短期记忆神经网络模型。
14、可选的实施方式,
15、日时间线基于预设规则被划分为c段片段,且根据排序,第r段片段的事件跨度为[tr,tr+1),c≥2,c为整数,h为小时;
16、每一段片段对应有一预测神经网络模型wr;
17、所述实时时间t具有对应的预测神经网络模型rt'包括:
18、基于所述实时时间t在所述c段片段中寻找匹配的片段;
19、所述匹配的片段所对应的预测神经网络模型为所述实时时间t对应的预测神经网络模型。
20、可选的实施方式,所述事件神经网络模型us'为多层神经网络模型。
21、可选的实施方式,所述根据所述预测事件集合v中的n个预测事件,执行每一个所述预测事件所对应的所有动作指令包括:
22、以辅助条件集合w对所述n个预测事件对应的所有动作指令进行二次筛选得到二次动作指令集;
23、执行所述二次动作指令集。
24、可选的实施方式,所述辅助条件集合w包括温度条件、湿度条件、照度条件。
25、可选的实施方式,所述辅助条件集合w还包括来自于预设传感器的触发信号。
26、为了提高智能家居设备的智能性,本发明实施例提供了一种智能家居设备控制方法,结合时间条件,利用训练好的神经网络对目标用户在目标住所内的位置进行预测并生成预测轨迹逆序列,以此为基础预测出将要发生的事件,最终根据事件的预测结果对相应的智能家居设备进行动作控制,从而得到更为符合用户智能化需求的智能家居设备。
技术特征:
1.一种智能家居设备控制方法,其特征在于,包括:
2.根据权利要求1所述的智能家居设备控制方法,其特征在于,所述检测时间间隔a≥0.5s。
3.根据权利要求1所述的智能家居设备控制方法,其特征在于,所述最大距离a≤2q。
4.根据权利要求1所述的智能家居设备控制方法,其特征在于,基于射频定位技术、zigbee定位技术、wifi定位技术、rfid定位技术、uwb定位技术中的其中一种或多种技术感知目标用户在所述目标住所内的所处网格et。
5.根据权利要求1所述的智能家居设备控制方法,其特征在于,所述预测神经网络模型rt'为长短期记忆神经网络模型。
6.根据权利要求1所述的智能家居设备控制方法,其特征在于,
7.根据权利要求1所述的智能家居设备控制方法,其特征在于,所述事件神经网络模型us'为多层神经网络模型。
8.根据权利要求1所述的智能家居设备控制方法,其特征在于,所述根据所述预测事件集合v中的n个预测事件,执行每一个所述预测事件所对应的所有动作指令包括:
9.根据权利要求8所述的智能家居设备控制方法,其特征在于,所述辅助条件集合w包括温度条件、湿度条件、照度条件。
10.根据权利要求8所述的智能家居设备控制方法,其特征在于,所述辅助条件集合w还包括来自于预设传感器的触发信号。
技术总结
本发明提供了一种智能家居设备控制方法,其主要作用为对部分触发式的智能家居设备进行控制,该智能家居设备控制方法利用神经网络的预测性能预测目标用户将要到达的预测位置,再以预测位置构建新的预测轨迹,并利用神经网络的分类性能得到目标用户的预测行为,最终以预测行为为导向,执行与预测行为相关联的智能设备动作指令,有别于现有技术下的智能家居设备控制方法,该智能家居设备控制方法可从另一更贴近用户思维的逻辑进行智能家居设备的应用,可降低用户对智能家居设备的动作逻辑的编程难度,有利于普及智能家居设备的使用。
技术研发人员:李伟超,张宏亮,邵晓艳,李焱,王海燕,栗文雁,林国
受保护的技术使用者:郑州航空工业管理学院
技术研发日:
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!