大型无人机组网系统及其方法与流程
本发明属于无人机控制,尤其涉及一种大型无人机组网系统及其方法。
背景技术:
1、随着科技发展的今天,无人飞行器已经逐渐被利用在日常生活中作为拍摄以及相应的表演,无人机是利用无线电遥控设备和自备的程序控制装置操纵的不载人飞机,其控制多为单对单的控制系统,现有通过阵列式无人机集群进行表演,但大量无人机的控制容易导致信道之间的相互干扰,存在改进的空间。
2、中国专利cn104836640b公开了一种无人机编队分布式协作通信方法,其包括以下步骤:无人机组成编队并建立通信机制;无人机编队在飞行时保持阵形不变并获得导航信息和目标信息;当无人机编队与地面移动接收站的距离小于l时,无人机编队构成一个虚拟的多天线阵列,无人机编队与地面移动接收站利用虚拟mimo技术进行通信;当无人机编队与地面移动接收站的距离大于l时,无人机编队构成一个虚拟的多天线阵列进行协作通信,共享所获取的导航信息和目标信息,无人机编队采用波束成形技术向地面移动接收站发送信息。上述方案能够提高无人机编队无线通信网络的传输速率以及时变信道的传输可靠性,而且能够扩大无线网络的传输距离和覆盖范围,但在实际使用时,无人机编队之间的控制均为独立控制,相互之间关联性较弱,容易因单个无人机的控制失效以及传输延迟影响到表演效果,存在改进的空间。
技术实现思路
1、本发明的目的在于:为了解决无人机编队之间的控制均为独立控制,相互之间关联性较弱,容易因单个无人机的控制失效以及传输延迟影响到表演效果的问题,而提出的一种大型无人机组网系统及其方法。
2、为了实现上述目的,本发明采用了如下技术方案:
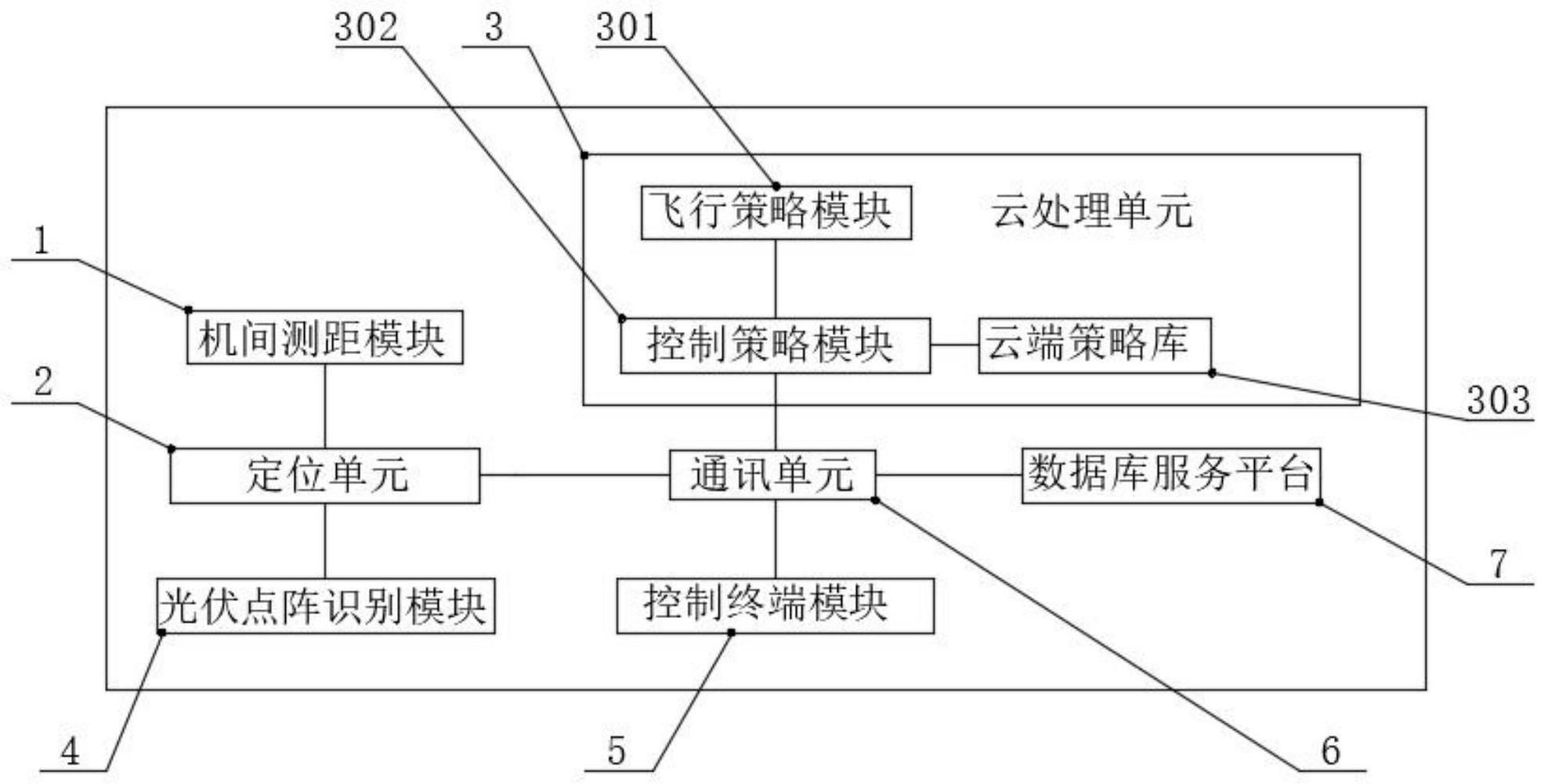
3、一种大型无人机组网系统,包括定位单元和通讯单元,所述通讯单元输入端与定位单元输出端相连接,所述通讯单元用于对定位单元的通讯数据进行传输,所述定位单元输出端电性连接有机间测距模块,所述机间测距模块用于获取多个机体之间的间距数据,所述定位单元输入端连接有光伏点阵识别模块,所述光伏点阵识别模块用于通过阵列激光线束的延伸对激光接收器的定位判断阵列位置,所述通讯单元输入端双向连接有云处理单元,所述云处理单元用于通过云端服务器对控制数据进行计算支撑,所述通讯单元输出端连接有控制终端模块,所述控制终端模块用于安装存储组网系统以及程序并进行组网控制。
4、作为上述技术方案的进一步描述:
5、所述定位单元包括信息传输模块,所述信息传输模块用于传输获取的数据信息,所述信息传输模块输入端连接有运动轨迹预载模块,所述运动轨迹预载模块用于获取整体运动轨迹信息并且进行预载计算,所述信息传输模块输入端连接有gps定位模块,用于通过gps定位模块获取阵列信息对定位数据进行。
6、作为上述技术方案的进一步描述:
7、所述通讯单元包括组合通信模块,所述组合通信模块用于分布式无人机之间的组合通信,所述组合通信模块的输出端与分布式通信模块的输入端电性连接,所述分布式通信模块用于设置于高性能控制无人机内进行分布式区域信息通信连接,所述分布式通信模块的输出端与信号搜索增益模块的输入端电性连接,所述信号搜索增益模块用于装置与高性能控制无人机对附近分布式无人机进行通信连接,所述信号搜索增益模块的输出端与视频传输模块的输入端电性连接,所述视频传输模块用于高性能控制无人机传输视频信息,所述视频传输模块的输出端与终端通信模块的输入端电性连接,所述终端通信模块用于向控制终端传输控制信息和进行组网控制,所述终端通信模块的输入端与分布式通信模块的输出端电性连接,所述分布式通信模块的输出端与寻码校准模块的输入端电性连接,所述寻码校准模块用于进行无人机之间的通信协议的标准化,所述寻码校准模块的输出端与信道生成模块的输入端电性连接,所述信道生成模块用于生成区分信道,所述信道生成模块的输出端与控制终端模块的输入端电性连接。
8、作为上述技术方案的进一步描述:
9、所述信道生成模块的输出端与信道验证模块的输入端电性连接,述信道验证模块用于验证信道协议信息。
10、作为上述技术方案的进一步描述:
11、所述信息传输模块输入端连接有空间坐标生成模块,所述空间坐标生成模块安装于分布式无人机内并生成空间坐标信息。
12、作为上述技术方案的进一步描述:
13、所述地图记载模块包括距离判断模块、硬件存储模块、续航计算模块,且距离判断模块输入端与信息传输模块输出端相连接,所述距离判断模块用于判断基于当前位置的移动轨迹距离,所述硬件存储模块用于存储地图测量,地图记载模块还包括续航计算模块,所述续航计算模块用于计算运动轨迹的需要续航并进行提醒。
14、作为上述技术方案的进一步描述:
15、所述云处理单元包括飞行策略模块、控制策略模块和云端策略库,所述飞行策略模块输入端双向连接有控制策略模块,所述飞行策略模块通过控制策略模块双向连接有云端策略库,所述飞行策略模块用于根据控制策略生成飞行策略,所述控制策略模块用于云端传输飞行策略,所述云端策略库用于提供云端运行策略。
16、作为上述技术方案的进一步描述:
17、所述通讯单元输出端双向连接有数据库服务平台,所述数据库服务平台用于进行通讯身份的认证处理。
18、作为上述技术方案的进一步描述:
19、大型无人机组网方法:具体包括以下步骤:
20、s1、将分布式无人机和高性能无人机分布放置后,打开控制终端模块进行信号组网;
21、s2、通过控制终端模块以及通线单元控制分布式无人机和高性能无人机进行组网,通信单元通过改进型蚁群算法将高性能无人机与分布式无人机之间进行路径组网,分布式无人机在与高性能无人机组网后,高性能无人机与控制终端模块连通,同时定位单元定位分布式无人机和高性能无人机的位置信息;
22、s3、通过控制终端模块对分布式无人机和高性能无人机位置进行获取后,通过云处理单元分析分布式无人机和高性能无人机位置后生成运动信息,高性能无人机通过通讯单元对分布式无人机分发控制信息后,分布式无人机和高性能无人机通过定位单元定位进行起飞控制,在行程阵列后,通过光伏点阵识别模块判断阵列组网是否完成,组网完成后开始控制运行。
23、作为上述技术方案的进一步描述:
24、所述改进型蚁群算法的路径组网包括:根据多组分布式无人机的附近区域生成若干点,并根据高性能无人机位置作为中心点,分布式无人机根据概率选择规则向高性能无人机位置中心点进行寻路通讯,同时高性能无人机向路径内附近重复散发组网信息素信息,分布式无人机根据算法选择出相应的分布式中心点后,在更新判断分布式无人机以及高性能无人机之间的遍历通讯延迟满足预设阈值后,得到最优通信距离,组网通讯建立完成。
25、综上所述,由于采用了上述技术方案,本发明的有益效果是:
26、1、本发明中,通过设计的云处理单元,能够通过云端实时运算对无人机阵列的大量运动数据进行快速运算判断,并且通过设计的定位单元,能够通过分布式无人机和高性能无人机之间的分布控制,降低大范围阵列时的相对范围内的通信信噪,提高定位控制精度,并且通过设计的通讯单元,能够通过寻码校准以及信号验证,提高与终端通讯通讯实时性和抗干扰能力,提高大范围无人机组件时控制表演的效果。
27、2、本发明中,通过设计的无人机组网方法,能够基于蚁群对信息的随机搜索,快速获取分布式无人机与高性能无人机之间的最优通信信道,并且能够根据信息素迭代的延迟阈值,能够快速获取最优控制路径,有利于提高阵列无人机组网连接效率以及连接精度,通过高性能无人机的信号传输,能够提高周围多个分布式无人机的控制效果,降低组网控制成本,满足使用需要。
- 还没有人留言评论。精彩留言会获得点赞!