一种分布式装配阻塞流水车间调度优化系统
本发明属于制造生产调度和路线统筹规划,特别涉及一种分布式装配阻塞流水车间调度优化系统,尤其涉及一种由增强卡尔曼滤波与历史学习机制所驱动的分布估计算法优化最小化装配完成时间的分布式装配阻塞流水车间调度问题。
背景技术:
1、复杂连续优化问题是工业生产、经济预测和复杂流程工业制造系统中,以最小化目标和最优解向量为目标优化各种指标的常见问题,其计算复杂度随着问题维数的增加呈指数级增长。此外,由于固有的变量不可分性、旋转不变性、非线性等特性,分支定界、线性规划以及传统的数学方法无法有效解决这类问题,在许多实际优化问题中难以准确建立数学模型。
2、分布式装配阻塞流水车间调度问题(dabfsp)是现代供应链和复杂流程工业系统中的一个重要问题,是复杂流程工业系统及供应链是否高效运行的关键问题。dabfsp是分布式阻塞流水车间调度问题(dbfsp)和装配问题的组合。dabfsp分为生产阶段和组装阶段。生产阶段由几个相同的阻塞流水车间组成。在装配阶段,存在一台装配机,生产工厂加工的工作转移到装配工厂完成装配过程。dabfsp是一个np难问题。
3、群智能优化算法是基于达尔文的自然选择定律。在每一代中,适应度最高的个体存活到下一代并产生新的个体。这些算法在求解连续实值优化和实际问题中取得了良好的效果。元启发式算法是一种典型的基于种群的智能优化算法,但勘探和开发能力影响了元启发式算法的性能。勘探的目的是寻找最优解所在的潜在区域,而开发的目的是关注精确的位置。在演化的早期阶段,全局勘探能力非常重要,在演化的后期需要进一步细化开发,直到满足收敛条件达到最优解。所以,对于优化问题,若要达到最佳的优化效果,必须在勘探和开发之间取得较好的平衡;但是目前传统算法都不能高效解决此问题。
4、分布估计算法(eda)是一种典型的基于统计概率模型的元启发式方法。它不同于其他通过交叉和变异操作生成新解的元启发式方法,如差分进化算法、入侵杂草优化和脑风暴优化算法。eda结合了遗传算法和统计学学习方法选择群体中的优势个体进行建模和估计,生成下一代个体。eda模型通常基于高斯型,即为geda,在进化过程中能够利用变量间隐藏的关系提取和利用有效信息。传统geda的缺点主要有:首先,种群多样性在进化中容易丧失,从而陷入局部最优。第二,种群进化方向偏离适应度提升方向,影响搜索效率。第三,上一代解的质量会影响建模的准确性。
5、为了解决geda存在的问题,提高其优化分布式装配阻塞流水车间的效率,对于算法的改进是十分必要的。liang yong sheng在《enhancing gaussian estimationofdistribution algorithmby exploiting evolution direction witharchive》中,保留了前几代生成的具有一定数量的高质量的解,并将其放入一个存档中,使用存档中的解估计高斯模型的协方差矩阵,提升了种群多样性,但是建模精度和搜索效率均较低。ren zhigang发表的《anisotropic adaptive variance scaling for gaussian estimationofdistribution algorithm》中,提出了各向异性自适应方差缩放(aavs)技术,通过调整不同特征方向的方差解决了种群方差衰减快和方向性差的问题,但是种群多样性差,不能较好的平衡勘探与开发能力。yang qiang在《multimodal estimation ofdistributionalgorithms》中,提出了一种多模态eda,通过动态聚类调整策略,利用混合分布生成子代以及自适应局部搜索策略,提高多模态问题的建模精度,但是模型框架复杂,不易实现,技术的实用性较差。
技术实现思路
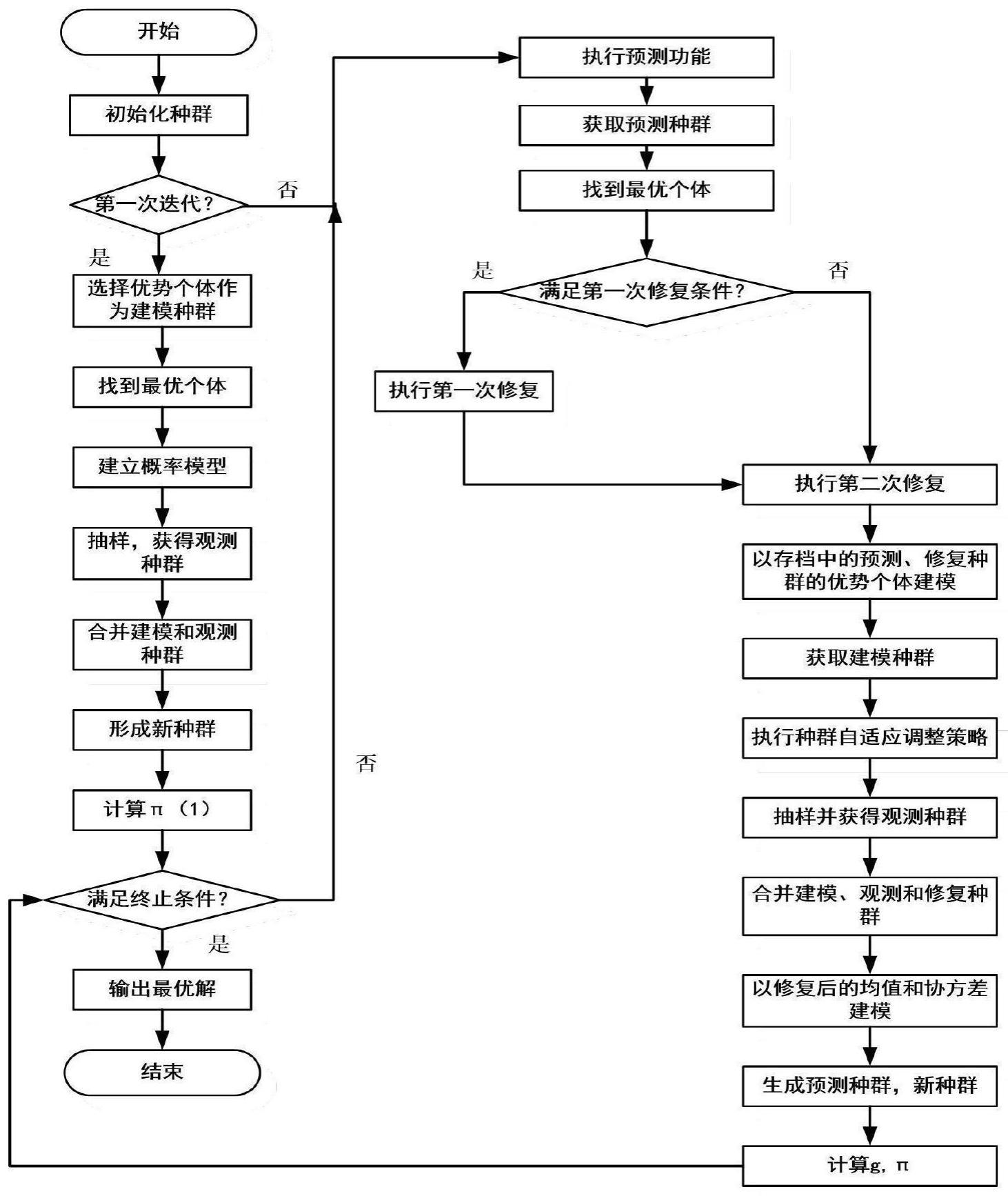
1、本发明的目的在于针对现有技术中存在的问题,借助甘肃省教育厅立项资助的研究生“创新之星”项目(编号2023cxzx-476)的支撑,展开相关研究,并提出技术解决方案,从优化算法层面和问题层面双向改进,设计了一种基于增强卡尔曼滤波和历史学习机制的分布估计算法优化分布式装配阻塞流水车间调度问题,具体流程如图1所示。通过对算法的改进有效解决传统eda在进化过程中种群多样性丧失、进化方向与适应度方向垂直、差解影响建模精度的问题,并经过理论和实验验证了该优化系统的有效性,进一步将其用于分布式装配阻塞流水车间调度系统中以最小化工厂的装配完成时间,取得了较好的优化效果。
2、为了实现上述目的,本发明所采用的技术方案如下:一种分布式装配阻塞流水车间调度优化系统,包括初始化阶段、基于预测过程的工件加工阶段、基于修复过程的工件加工阶段、产品装配阶段,如图2所示,将多个不同的工件合理分配给不同的工厂的机器上。
3、在生产过程中,n个待加工的工件被分配到f个工厂进行加工,每个加工工厂都是由m台机器组成的阻塞流水车间,每个工件都要经过m道工序才能完成加工;在装配阶段,n个加工完成的工件在一台装配机器上完成装配。注意,只有当属于一个产品的所有工件都完成加工以后该产品才开始装配,图3为加工和装配过程的甘特图,不同的数字代表不同的工件,不同工件的长度代表相应的生产和装配时间,通过本优化器达到最小化装配完成时间的效果。
4、所述生产过程中的初始化阶段如步骤1-3所述:
5、步骤1:输入选定的选择率τ、个体数量np、停止准则;
6、采用截断选择的方法,即以一定的选择率从解空间中找到适应度值最小的若干工件,从所有工件中找到优势解个体引导后期迭代的方向。
7、步骤2:随机初始化个体;
8、步骤3:进行第一次迭代。卡尔曼滤波需要先验信息,第一次迭代单独进行,具体包括a1-a8子步骤:
9、步骤a1:选择最优的τ*np个个体作为建模个体popmod(1);
10、步骤a2:找到最优个体xpbest(1);
11、步骤a3:构建历史存档,存储选定的优势个体;
12、步骤a4:计算存档中个体的适应度值;
13、步骤a5:计算存档内个体的均值μ(k)和协方差矩阵c(k);
14、
15、
16、其中,xi(k)为存档中的个体,k为迭代次数,此处,k=1。
17、从历史存档的优势工件集估计均值、协方差矩阵修复建模数据,提高模型精度,将不同操作手段得到的优势工件放入存档中,存档中有丰富的优秀个体的信息。
18、步骤a5:按照改进后的均值μ(k)和协方差矩阵c(k),构建概率模型;
19、步骤a6:抽样,获取观测个体popobs(1);
20、步骤a7:合并建模个体popmod(1)和观测个体popobs(1),形成新的种群newpop(1);
21、步骤a8:为了进一步提高模型精度,按照公式(3)计算修复提升矩阵π(1),将每代得到的预测精度加入滤波阶段的修复过程;
22、
23、其中,代表第一代观测个体中被选择的优势个体。
24、步骤4:从第二代开始直至满足最大迭代次数,进行迭代;
25、步骤5:执行基于卡尔曼滤波预测过程的工件加工阶段:
26、本发明采用的概率分布是基于高斯型的,其条件概率密度的更新过程为最小方差估计。
27、根据观测数据对变量进行定量推断是估计问题,特别是对动态行为的状态估计,实现当前状态的估计和预测功能。
28、对系统下一步的走向做出有根据的预测,卡尔曼滤波总是能指向真实状态。
29、原始预测值和观测值的计算如公式4-5所示:
30、
31、y(k)=b*x(k-1)+ε(k) 公式5
32、其中,x(k-1)为上一时刻的预测值,x(k)是当前时刻的预测值,y(k)是当前时刻的观测值,ε(k)是观测时的噪声分量,是预测误差矩阵,a是从前一状态到当前状态的状态转移矩阵,b是输入变量的系数矩阵,h是观测系数矩阵。
33、将存档中的优秀解引入预测功能,其中步骤5包括b1-b4子步骤:
34、步骤b1:基于卡尔曼滤波思想,本发明对上一代的相关个体信息进行预测获取预测个体poppre(k),预测个体的获得按照公式6:
35、
36、其中,是预测个体,c是单位矩阵,xbest(k-1)是上一代最好个体,d是对角矩阵,对角线元素随机生成。πi(k-1)是第i个个体在k-1代的修复改进量,定义如公式7:
37、
38、步骤b2:从历史存档中找到最优个体xpbest;
39、步骤b3:将上一代个体pop(k-1)和预测个体poppre(k)中的优势工件用于建模;
40、步骤b4:得到用于观测的观测工件;
41、所述基于修复过程的工件加工阶段如步骤6-8:
42、步骤6:若满足第一次修复的条件,执行第一次修复操作;
43、在进化过程中,当出现以下情况时,需要进行一次修复操作,具体包括:
44、步骤c1:协方差矩阵不是正定时,进行一次修复操作;
45、步骤c2:每个变量中个体的最大值和最小值之间的差值小于10-4,进行一次修复操作;
46、步骤c3:不断修复每类个体所占百分比;
47、具体修复方法为:正常情况下,由前面的进化过程可知,它是由精英化引导的,按照选择率τ选择两类个体中的优势工件进行建模,影响下一代个体。若以上两种情况至少一种出现时,将预测个体的选择率增加10%,另一类个体则减少10%。同样,若是连续两代都无法得到更好解时,预测个体的选择率再增加10%,另一类则继续减少10%,当以上两种情况时,预测个体的百分比每次增加10%,另一类个体减少10%。若百分比超过了100%,则减掉100%,取余下的百分比;或者小于0%时,则加上100%。
48、举例:当此时预测个体占比达到95%,另一类则占5%;若是达到了一次修复的条件,则修复后预测的选择率为((95%+10%)-100%)=5%;其他个体的选择率则为((5%-10%)+100%)=95%。以此类推。
49、步骤7:执行第二次修复操作,具体包括步骤d1-d4:
50、步骤d1:以存档中的预测个体、修复个体和上一代个体中的优势工件建模;
51、步骤d2:获取建模个体popmod;
52、步骤d3:按照自适应调整策略计算每一代的种群大小;
53、在进化的早期阶段,需要更大的搜索空间,以免陷入局部最优,需要较好的勘探能力;在后期阶段,侧重开发能力,可以适当减小种群规模,以加快收敛速度获得最优解。不同于种群大小固定的常规做法,自适应策略可以更好地平衡勘探和开发能力。
54、利用不同阶段的特点自适应的动态调整种群规模,避免了计算资源的浪费。调整规则如公式8:
55、
56、公式8
57、其中,npmax,npmin分别代表最大数量和最小数量;nfes,max_nfes分别代表当前代的适应度评估次数和最大评估次数;round是一个函数。
58、初始时让种群规模达到最大,在迭代过程中,线性的减小直至达到最小值。
59、结合geda的特点,其协方差矩阵包含0.5*(n2+n)个估计参数;因此,将最小值取为0.5*(n2+n),最大值按照实验部分的参数校准试验获得。
60、步骤d4:抽样,获得观测个体popobs;
61、步骤d5:合并建模个体、观测个体和修复个体中的优势工件;
62、步骤d6:按照基于卡曼滤波改进后的均值和方差建模;
63、用优势解引导加快eda的迭代速度,减少因随机性造成的消耗,精英引导种群进化的方向是一个非常有效的措施。改进后的优化方法考虑了优势个体所携带的特定知识信息,并且优化了个体的分布情况。为了强调这一思想,采用以存档中优势个体适应度值加权修正均值,优势个体的适应度值增强了其影响力。
64、由公式(1)均值的定义可知,修复后的均值表示为:
65、
66、改进后的均值可以获得eda的更有潜力的解空间。
67、基于改进的均值,相应的协方差矩阵的改进公式为:
68、
69、以上修正进一步充分开发了有潜力的搜索区域,并且加快了搜索效率和精度。
70、改进均值的作用是找到有潜力的搜索中心。通过这种线性操作可以找到更好的解。因为它沿着适应度值提升的方向。
71、均值的修正改进量为:
72、
73、显然,均值会向更有潜力的方向。经过以上几种操作后,使得均值的改变向搜索中心靠近,沿着进化方向快速找到更好的解。此外,修复阶段用最优解引导,加快eda的搜索过程,减少因随机搜索造成的时间消耗。
74、基于卡尔曼滤波改进的eda扩大了搜索空间,且改进了搜索方向,较好的平衡了eda的勘探和开发能力,图4是经卡尔曼滤波后解的分布。如图4所示,其中fid代表适应度提升方向,ed代表主轴方向,两个方向是平行的达到最优搜索。
75、步骤d7:生成新种群new_pop;
76、步骤d8:计算修复增益系数g;
77、eda的搜索过程一般不是线性的,需要进行转换,通过修复改进矩阵和系统增益系数实现这种转换思想。系统增益系数g,如式12所示。
78、
79、其中,f(xpbest(k-1)),分别是上一代最优个体和第i个个体的适应度值。
80、增益系数利用了修复改进矩阵的信息和上一代个体与最优个体的适应度差值,作为修复阶段个体的加权系数。
81、步骤d9:获取修复个体poprev;
82、
83、更具体的,图5是经修复后解的组成和进化方向。如图5所示,可见预测操作和修复操作对于解的分布的影响,其中五角星代表最优个体,正方形代表修复个体,三角形代表预测个体,圆形代表原来的个体。
84、步骤d10:计算修复提升矩阵π;
85、步骤d11:找到全局最优解xgbest;
86、步骤d12:一次循环迭代,直至满足停止准则;
87、步骤8:当属于该产品的最后一个工件加工完成立即开始组装。即根据各个工件的完成时间决定产品的装配顺序。
88、为了解决传统优化方法用于分布式装配阻塞流水车间调度问题时出现的以下问题导致性能较差,不能快速找到最优工件序列。第一,种群多样性丧失,从而使得系统陷入局部最优;第二,种群进化方向偏离适应度提升方向,搜索效率降低。第三,上一代解的质量会影响建模的准确性。目前出现的改进后的eda变体虽然能解决其中一到两个问题,但实用性较差。在本发明中,将通信系统中的数字处理技术--卡尔曼滤波引入eda框架,根据在分布式装配阻塞流水车间调度问题中的具体问题特征,对卡尔曼滤波过程进一步改进,并且充分结合了历史学习机制和种群自适应策略的优点,优化生产的加工过程和装配过程。通过与传统优化系统对比效果,本优化系统能同时快速高效地解决以上问题,使系统优化性能获得大幅提升,本系统所进行的改进措施的具体优势为:
89、1.引入增强的卡尔曼滤波机制不仅将观测、预测、修复操作嵌入到了eda优化框架中,改进了概率模型,增加了搜索范围,并调整了搜索方向,使得进化更快速更有效;
90、2.将卡尔曼滤波中加入了历史存档,增加种群多样性;
91、3.增强卡尔曼滤波机制被引入到概率模型中。针对具体问题特征,设计了改进的增强卡尔曼滤波机制,将改进的滤波过程中的预测、观察、第一次修复和第二次修复工程分别应用于工件的加工阶段,提高求解具有最小装配完成时间的最优工件序列的效率;
92、4.将精英策略引入了修复提升矩阵,引导修复种群的进化,改善建模精度。此外,将卡尔曼滤波操作得到的增强信息通过历史学习机制反馈给eda模型,增加种群多样性,进一步改善解的质量;
93、5.利用自适应调整策略减少无效搜索,较好的平衡了优化系统勘探和开发能力,有利于找到具有最优目标的工件序列;
94、6.在30个不同优化问题以及由不同工厂数、机器数、工件数、产品数组成的实例上进行验证,说明了所提优化系统的有效性,并且理论证明了增强卡尔曼滤波操作对eda的搜索范围和搜索方向的改进是有益的。
- 还没有人留言评论。精彩留言会获得点赞!