具有时变时延的机器人双边遥操作系统的控制方法
本发明涉及机器人遥操作系统的控制的,具体而言,涉及具有时变时延的机器人双边遥操作系统的控制方法。
背景技术:
1、在机器人遥操作系统中,操作者通过主机器人远程操作从机器人在一些特殊的环境中执行任务,如辐射和有害物质处理、水下勘探、空间操作和远程外科手术等。操作者信息通过主机器人传递到从机器人,而从机器人又将环境信息传递到主机器人,进而让操作者获取从机器人与远程环境的交互信息,由于主从机器人之间的信息是双向流动的,这种远程操作系统被称为双边遥操作系统。
2、双边遥操作系统要求从机器人可以精确地跟踪主机器人的关节位置,并且操作者可以真实地感受到从机器人与环境的交互力,保证系统的位置跟踪性能和力跟踪性能。由于主从机器人之间进行数据交换时不可避免地会出现通信时延,因此时延是影响双边遥操作系统跟踪性能的复杂实际问题之一。针对具有常数时延的遥操作系统控制问题,学者们已经进行了大量的研究,然而实际的遥操作系统中最常见的并不是常数延迟,更多的是一些时变的延迟。因此,未知的外部交互力和时变时延是导致主从机器人之间的关节位置和力跟踪误差增大而致使降低遥操作系统透明性和稳定性的主要原因。
3、为了解决遥操作系统的时变时延问题,中国发明专利cn103831831a公开了具有时变时延的非线性遥操作系统位置和力跟踪控制系统,公开了一种具有时变时延的位置和力跟踪控制系统来解决传输延迟导致主从机器人之间位置和力误差的问题,但该专利存在时变时延的变化率小于1的约束,同时还需要实际测量在复杂环境下使用力传感器来测量操作者与主机器人的交互力和从机器人与环境之间的交互力。
技术实现思路
1、本发明的主要目的在于提供具有时变时延的机器人双边遥操作系统的控制方法,以解决现有技术中双边遥操作系统因未知的外部交互力和时变时延而致使系统透明性和稳定性较差的技术问题。
2、为了实现上述目的,本发明提供了具有时变时延的机器人双边遥操作系统的控制方法,技术方案如下:
3、具有时变时延的机器人双边遥操作系统的控制方法,包括以下步骤:
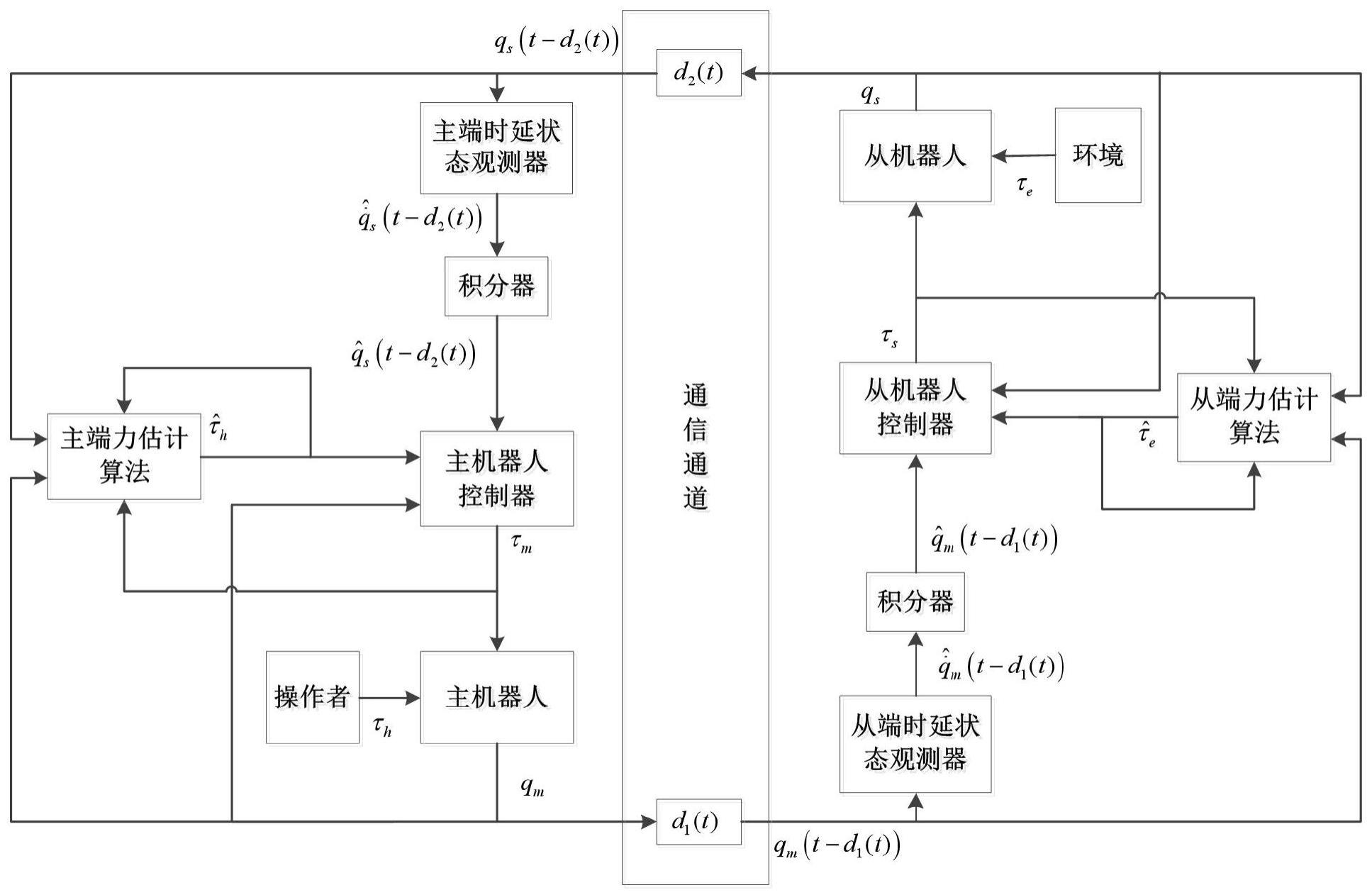
4、在通信通道的主机器人侧:
5、通信通道获取从机器人关节位置并输出受时变时延影响的从机器人关节位置;
6、主端时延状态观测器获取所述受时变时延影响的从机器人关节位置并处理得到受时变时延影响的从机器人关节位置导数的估计值,再通过积分器得到受时变时延影响的从机器人关节位置的估计值;
7、主端力估计算法处理所述受时变时延影响的从机器人关节位置、主机器人的关节位置以及主机器人控制器的控制力矩并输出主端力的估计值;
8、主机器人控制器获取所述受时变时延影响的从机器人关节位置的估计值、主端力的估计值以及主从机器人关节位置并处理得到主机器人控制器的控制力矩;
9、主机器人获取主端力和所述主机器人控制器的控制力矩并处理得到主机器人的关节位置;
10、并且/或者,在通信通道的从机器人侧:
11、通信通道获取主机器人关节位置转变并输出受时变时延影响的主从机器人关节位置;
12、从端时延状态观测器获取所述受时变时延影响的主机器人关节位置并处理得到受时变时延影响的主机器人关节位置导数的估计值,再通过积分器得到受时变时延影响的主机器人关节位置的估计值;
13、从端力估计算法处理所述受时变时延影响的主机器人关节位置、从机器人的关节位置以及从机器人控制器的控制力矩并输出从端力的估计值;
14、从机器人控制器获取所述受时变时延影响的主机器人关节位置的估计值、从端力的估计值以及从机器人关节位置并处理得到从机器人控制器的控制力矩;
15、从机器人获取从端力和所述从机器人控制器的控制力矩并处理得到从机器人的关节位置。
16、一方面,本发明的控制方法力估计算法可以有效估计系统的交互力,代替传感器对交互力的测量从而避免了力传感器使用带来的测量噪声和成本问题。另一方面,本发明的控制方法在保证系统稳定性时不需要时变时延的变化率小于1的约束。可见,本发明的控制方法能够有效解决主从机器人中未知的外部交互力和时变时延产生的技术问题,显著提高主从机器人关节位置和力跟踪的精确性,提高双边遥操作系统透明性和稳定性。经验证,在通信通道的主机器人侧和从机器人侧中的任意一侧采用本发明的控制方法,均能在一定程度上提升双边遥操作系统透明性和稳定性,当主机器人侧和从机器人侧均采用本发明的控制方法时,双边遥操作系统的透明性和稳定性最好。
17、下面结合附图和具体实施方式对本发明做进一步的说明。本发明附加的方面和优点将在下面的描述中部分给出,部分将从下面的描述中变得明显,或通过本发明的实践了解到。
技术特征:
1.具有时变时延的机器人双边遥操作系统的控制方法,其特征在于:包括以下步骤:
2.如权利要求1所述的具有时变时延的机器人双边遥操作系统的控制方法,其特征在于:具有时变时延的机器人双边遥操作系统为非线性的遥操作系统,其中,
3.如权利要求2所述的具有时变时延的机器人双边遥操作系统的控制方法,其特征在于:所述主端时延状态观测器为:
4.如权利要求2所述的具有时变时延的机器人双边遥操作系统的控制方法,其特征在于:所述主端力估计算法为:
5.如权利要求2所述的具有时变时延的机器人双边遥操作系统的控制方法,其特征在于:所述主机器人控制器为:
6.如权利要求2所述的具有时变时延的机器人双边遥操作系统的控制方法,其特征在于:所述从端时延状态观测器为:
7.如权利要求2所述的具有时变时延的机器人双边遥操作系统的控制方法,其特征在于:所述从端力估计算法为:
8.如权利要求2所述的具有时变时延的机器人双边遥操作系统的控制方法,其特征在于:所述从机器人控制器为:
技术总结
本发明公开了具有时变时延的机器人双边遥操作系统的控制方法,解决了双边遥操作系统透明性和稳定性较差的技术问题。控制方法包括步骤:主端时延状态观测器输出受时变时延影响的从机器人关节位置导数的估计值;通过积分器得到从机器人关节位置的估计值;主端力估计算法输出主端力的估计值;主机器人控制器处理从机器人关节位置的估计值、主端力的估计值并得到主机器人控制器的控制力矩;从端时延状态观测器输出受时变时延影响的主机器人关节位置导数的估计值;通过积分器得到主机器人关节位置的估计值;从端力估计算法输出从端力的估计值;从机器人控制器获取主机器人关节位置的估计值、从端力的估计值并处理得到从机器人控制器的控制力矩。
技术研发人员:刘霞,吴优,杨勇,蒋文波
受保护的技术使用者:西华大学
技术研发日:
技术公布日:2024/1/14
- 还没有人留言评论。精彩留言会获得点赞!