一种机器狗的仿真控制方法和系统与流程
本发明涉及多足机器人控制领域,尤其涉及一种机器狗的仿真控制方法和系统。
背景技术:
1、现有的移动机器人技术在轮式机器人和履带式机器人上的发展正在趋向成熟,但是从另外一个角度看,轮式机器人和履带式机器人只能在平坦的路面上进行移动,这大大限制了它们的应用范围。在日常生活中,面对如台阶、陡坡等等复杂的地形,无论是轮式机器人还是履带式机器人都无法适应,因此需要足式机器人。其中,四足的机器狗相对于双足机器人稳定性更强,相对于六足机器人则操作更加简单,因此是现今研发的重点领域。
2、对于四足机器狗,现有的零力矩点(zmp)控制方法的前提是静态的稳定控制,即保证机器人的重心(cog)在足端所在的支撑平面的投影处于支撑足形成的多边形内部,以保证机器人是静态稳定的。通常用静态稳定裕度来判定一次静态运动的稳定性,即cog与多边形所形成的最短距离。为了保证合理的静态稳定裕度值,机器人需要时刻改变自己速度和位置,因此无法在较快的频率下处理,只适用于较慢的速度,无法应对例如台阶、陡坡等复杂环境的缺陷。
技术实现思路
1、针对上述问题,本发明提出一种机器狗的仿真控制方法和系统,主要解决基于零力矩点控制的四足机器狗运行频率过低的问题。
2、为解决上述技术问题,本发明第一方面提出一种机器狗的仿真控制方法,包括以下步骤:
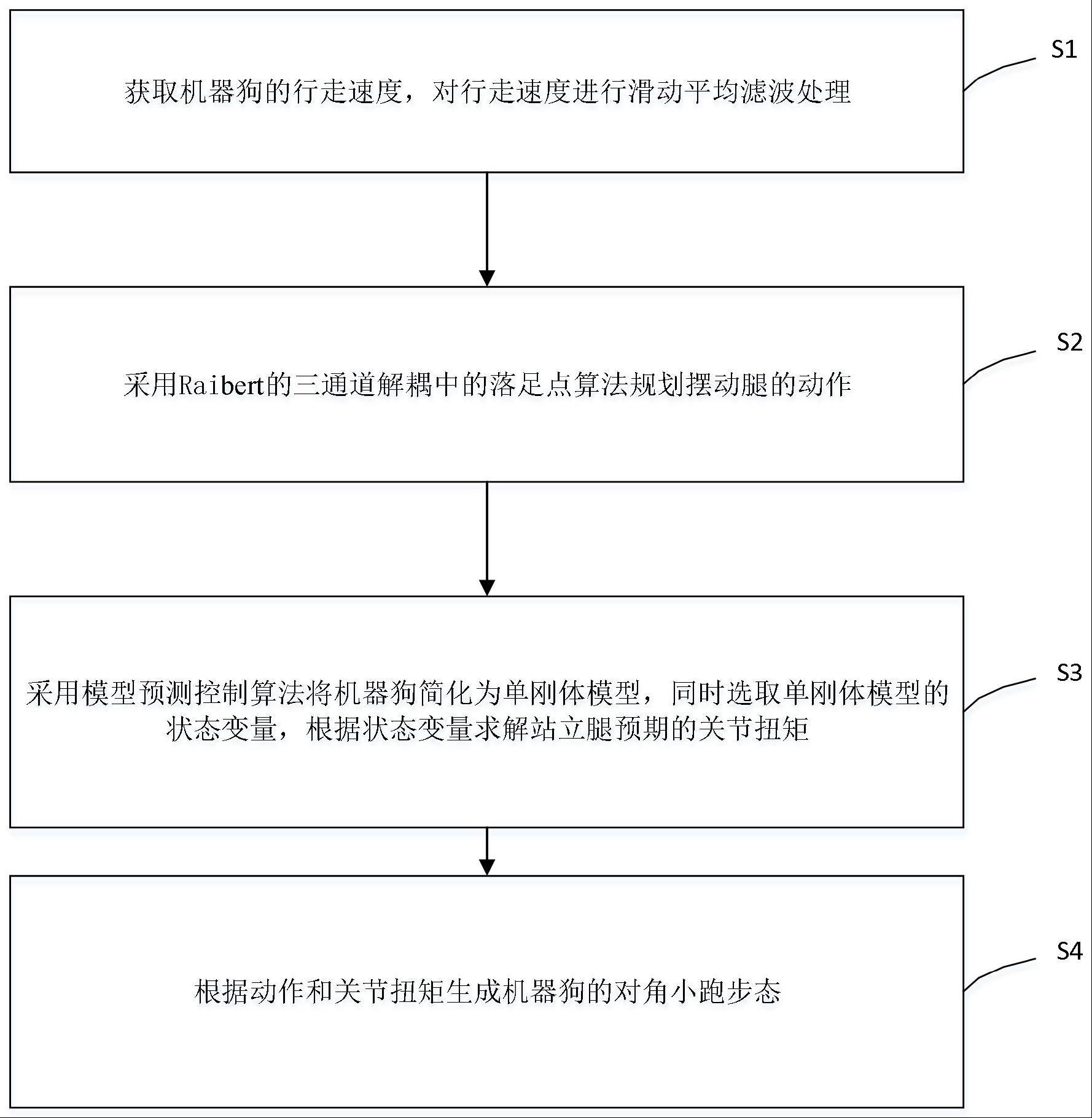
3、获取机器狗的行走速度,对所述行走速度进行滑动平均滤波处理;
4、将所述机器狗的其中一双处于对角线的双足定义为摆动腿,将另一双处于对角线的双足定义为站立腿;
5、采用raibert的三通道解耦中的落足点算法规划所述摆动腿的动作;
6、采用模型预测控制算法将所述机器狗简化为单刚体模型,同时选取所述单刚体模型的状态变量,根据所述状态变量求解所述站立腿预期的关节扭矩;
7、根据所述动作和所述关节扭矩生成所述机器狗的对角小跑步态。
8、本发明第二方面提出一种机器狗的仿真控制系统,包括:
9、速度估计控制单元,用于获取机器狗的行走速度,对所述行走速度进行滑动平均滤波处理;
10、机器狗模块,将所述机器狗的其中一双处于对角线的双足定义为摆动腿,将另一双处于对角线的双足定义为站立腿;
11、摆动腿单元,用于采用raibert的三通道解耦中的落足点算法规划所述摆动腿的动作;
12、站立腿单元,用于采用模型预测控制算法将所述机器狗简化为单刚体模型,同时选取所述单刚体模型的状态变量,根据所述状态变量求解所述站立腿预期的关节扭矩;
13、步态生成单元,用于根据所述动作和所述关节扭矩生成所述机器狗的对角小跑步态。
14、第三方面,本发明提供一种机器狗的仿真装置,包括存储器、处理器以及存储在所述存储器中并可在所述处理器上运行的计算机程序,所述处理器执行所述计算机程序时实现如上任一所述方法的步骤。
15、第四方面,本发明提供一种计算机可读存储介质,所述计算机可读存储介质存储有计算机程序,所述计算机程序被处理器执行时实现如上任一所述方法的步骤。
16、本发明的有益效果为:通过以摆动腿的动作和关节扭矩为目标参数,生成所述机器狗的对角小跑步态,解决了目前移动机器人无法在例如台阶、陡坡等复杂环境下工作的问题。
技术特征:
1.一种机器狗的仿真控制方法,其特征在于,包括以下步骤:
2.如权利要求1所述的机器狗的仿真控制方法,其特征在于,采用补偿求和算法对所述行走速度进行滑动平均滤波处理。
3.如权利要求1所述的机器狗的仿真控制方法,其特征在于,所述模型预测控制算法还用于根据所述单刚体模型预测最优地面反力,根据所述最优地面反力控制所述状态变量的变化。
4.如权利要求4所述的机器狗的仿真控制方法,其特征在于,将所述站立腿的足底受到的摩擦阻力作为所述模型预测控制算法的约束条件,并根据所述约束条件构建标准二次规划,求解出所述最优地面反力,将所述最优地面反力逆解到所述站立腿的关节处,求解所述站立腿预期的关节扭矩。
5.一种机器狗的仿真控制系统,其特征在于,包括:
6.如权利要求1所述的机器狗的仿真控制系统,其特征在于,采用补偿求和算法所述行走速度进行滑动平均滤波处理。
7.如权利要求1所述的机器狗的仿真控制系统,其特征在于,所述模型预测控制算法还用于根据所述单刚体模型预测最优地面反力,根据所述最优地面反力控制所述状态变量的变化。
8.如权利要求7所述的机器狗的仿真控制系统,其特征在于,将所述站立腿的足底受到的摩擦阻力作为所述模型预测控制算法的约束条件,并根据所述约束条件构建标准二次规划,求解出所述最优地面反力,将所述最优地面反力逆解到所述站立腿的关节处,求解所述站立腿预期的关节扭矩。
9.一种机器狗的仿真装置,包括存储器、处理器以及存储在所述存储器中并可在所述处理器上运行的计算机程序,其特征在于,所述处理器执行所述计算机程序时实现如权利要求1至4任一所述方法的步骤。
10.一种计算机可读存储介质,所述计算机可读存储介质存储有计算机程序,其特征在于,所述计算机程序被处理器执行时实现如权利要求1至4任一所述方法的步骤。
技术总结
本发明公开一种机器狗的仿真控制方法及系统,该方法包括以下步骤:获取机器狗的行走速度,对行走速度进行滑动平均滤波处理;将机器狗的其中一双处于对角线的双足定义为摆动腿,将另一双处于对角线的双足定义为站立腿;采用Raibert的三通道解耦中的落足点算法规划摆动腿的动作;采用模型预测控制算法将机器狗简化为单刚体模型,同时选取单刚体模型的状态变量,根据状态变量求解站立腿预期的关节扭矩;根据动作和关节扭矩生成机器狗的对角小跑步态。本发明的有益效果是:通过以摆动腿的动作和关节扭矩为目标参数,生成所述机器狗的对角小跑步态,解决了目前移动机器人无法在例如台阶、陡坡等复杂环境下工作的问题。
技术研发人员:张智军,丁成,罗亚梅,邢永恒
受保护的技术使用者:人工智能与数字经济广东省实验室(广州)
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!