基于车路协同技术的隧道内自动驾驶车辆循迹控制方法及系统与流程
本发明涉及信息处理,具体涉及一种基于车路协同技术的隧道内自动驾驶车辆循迹控制方法及系统。
背景技术:
1、自动驾驶车辆需要实时提供车身在世界坐标系中的位置信息,随着卫星定位技术的成熟,在空旷道路上可以通过gps和rtk直接获得非常精确的定位结果。而在gps信号弱或者完全失效的情况下,一般需要事先构建对应的高精地图,然后借助高精地图提供精确的定位结果。但是在高速公路中的长距离隧道场景中,车辆很长一段时间内无法获得稳定的gps信号,现有的自动驾驶车辆的循迹行驶需要车辆定位,在隧道内,依靠卫星定位的车载定位系统失效,目前行业内都通过惯导来提供定位,最终实现车辆的循迹;
2、但是惯导设备价格昂贵,且随着惯导使能距离的长度而增加,不适合大面试使用,而且惯导设备本身的稳定性不足,将提高隧道内的循迹风险。
技术实现思路
1、本发明的目的在于提供一种定位精度可达自动驾驶控制要求的基于车路协同技术的隧道内自动驾驶车辆循迹控制方法及系统。
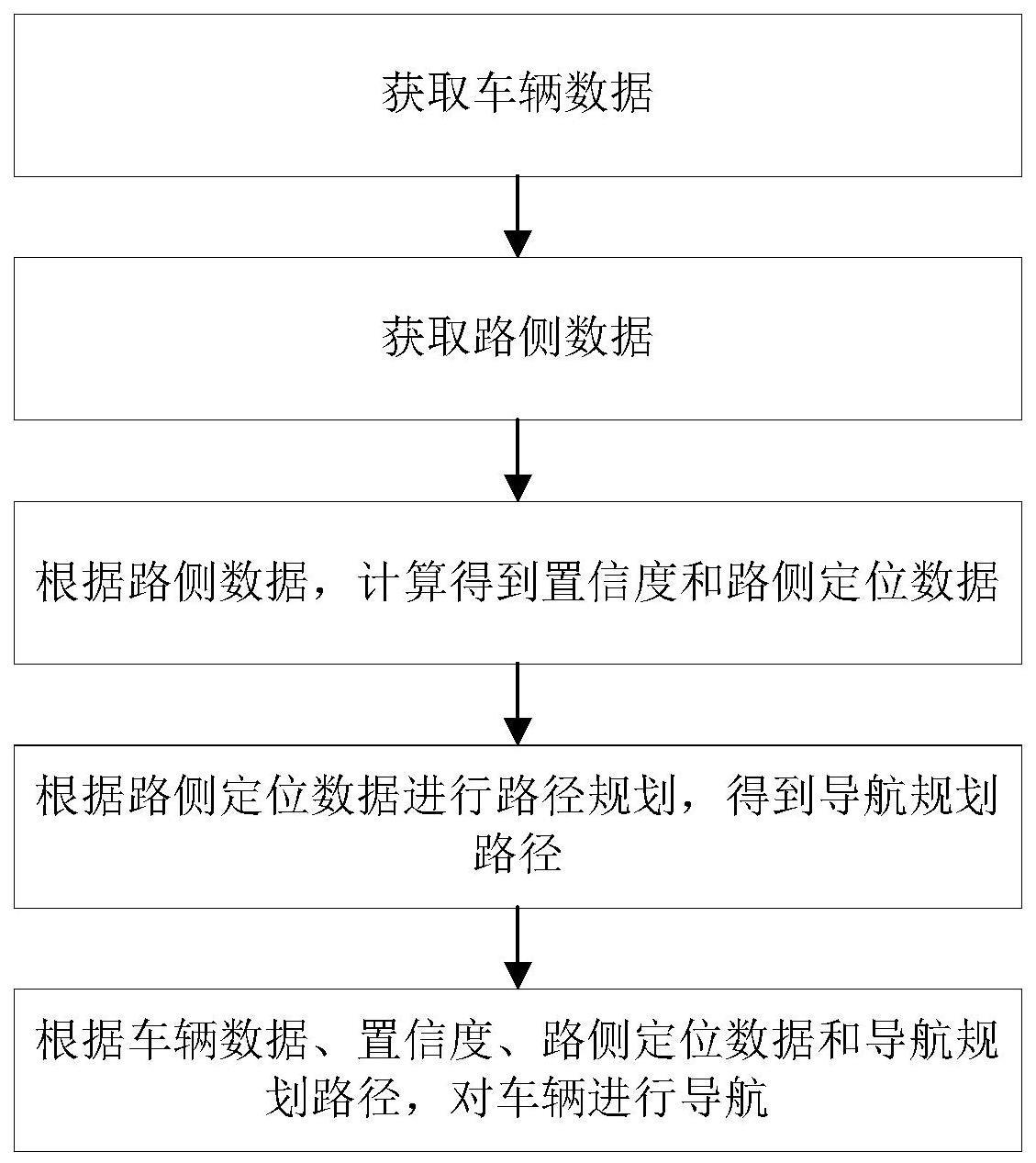
2、为解决上述技术问题,本发明提供一种基于车路协同技术的隧道内自动驾驶车辆循迹控制方法,包括以下步骤:
3、获取车辆数据;
4、获取路侧数据;
5、根据路侧数据,计算得到置信度和路侧定位数据;
6、根据路侧定位数据进行路径规划,得到导航规划路径;
7、根据车辆数据、置信度、路侧定位数据和导航规划路径,对车辆进行导航。
8、优选地,所述路侧数据包括传感器数据和车辆感知数据。
9、优选地,根据路侧数据,计算得到置信度和路侧定位数据,具体包括以下步骤:
10、根据传感器数据,计算得到置信度;
11、根据车辆感知数据,计算得到车辆和传感器之间的相对距离与速度;
12、根据传感器数据以及车辆和传感器之间的相对距离与速度,得到路侧定位数据。
13、优选地,根据传感器数据以及车辆和传感器之间的相对距离与速度,得到路侧定位数据,具体包括以下步骤:
14、根据传感器数据,计算出车辆绝对gps坐标;
15、根据车辆和传感器之间的相对距离与速度,对车辆绝对gps坐标进行插值处理,得到路侧定位数据。
16、优选地,根据车辆数据、置信度、路侧定位数据和导航规划路径,对车辆进行导航,具体包括以下步骤:
17、获取道路数据;
18、判断置信度是否为高置信度;
19、若置信度为高置信度,则以路侧定位数据作为车辆实际定位数据;
20、若置信度为低置信度,则根据车辆数据和道路数据进行积分位置估算,得到估算定位,以估算定位作为车辆实际定位数据;
21、根据车辆实际定位数据和导航规划路径,对车辆进行导航。
22、优选地,根据车辆实际定位数据和导航规划路径,对车辆进行导航,具体包括以下步骤:
23、根据车辆实际定位数据和车辆数据,结合导航规划路径,使用pid控制算法进行循迹控制。
24、优选地,所述高置信度为置信度大于等于60%;
25、所述低置信度为置信度小于60%。
26、优选地,所述估算定位的计算公式为:
27、
28、式中:s为估算定位;r为道路数据中的道路曲率,α为车辆数据中的前轮转角,v为车辆车速。
29、优选地,还包括以下步骤:
30、在持续低置信度超过5s时,进行报警。
31、本发明还提供一种基于车路协同技术的隧道内自动驾驶车辆循迹控制系统,包括:
32、车载单元obu,其用于获取车辆数据;
33、路侧感知设备,其用于获取路侧数据;
34、定位模块,其用于根据路侧数据,计算得到置信度和路侧定位数据;
35、路径规划模块,其用于根据路侧定位数据进行路径规划,得到导航规划路径;
36、导航模块,其用于根据车辆数据、置信度、路侧定位数据和导航规划路径,对车辆进行导航。
37、与现有技术相比,本发明的有益效果为:
38、1、云端融合路侧车辆感知数据和实时的车辆数据,在车辆行驶在隧道内时提供准确的云端高精度定位数据;
39、2、车辆以云端提供的定位数据为循迹依据,沿云端下发的规划轨迹进行自动驾驶循迹控制;
40、3、云端融合算法保证了车辆循迹控制所需的位置实时数据、规划轨迹数据的精度;
41、4、只需要布设隧道内路侧设备,建立云端融合系统,即可为大量自动驾驶车辆提供循迹服务,不需要车辆大规模升级车载设备来解决自动驾驶车辆的隧道内循迹问题;
42、5、定位精度可达自动驾驶控制要求。
技术特征:
1.基于车路协同技术的隧道内自动驾驶车辆循迹控制方法,其特征在于,包括以下步骤:
2.根据权利要求1所述的基于车路协同技术的隧道内自动驾驶车辆循迹控制方法,其特征在于:
3.根据权利要求2所述的基于车路协同技术的隧道内自动驾驶车辆循迹控制方法,其特征在于,根据路侧数据,计算得到置信度和路侧定位数据,具体包括以下步骤:
4.根据权利要求3所述的基于车路协同技术的隧道内自动驾驶车辆循迹控制方法,其特征在于,根据传感器数据以及车辆和传感器之间的相对距离与速度,得到路侧定位数据,具体包括以下步骤:
5.根据权利要求1所述的基于车路协同技术的隧道内自动驾驶车辆循迹控制方法,其特征在于,根据车辆数据、置信度、路侧定位数据和导航规划路径,对车辆进行导航,具体包括以下步骤:
6.根据权利要求5所述的基于车路协同技术的隧道内自动驾驶车辆循迹控制方法,其特征在于,根据车辆实际定位数据和导航规划路径,对车辆进行导航,具体包括以下步骤:
7.根据权利要求5所述的基于车路协同技术的隧道内自动驾驶车辆循迹控制方法,其特征在于:
8.根据权利要求5所述的基于车路协同技术的隧道内自动驾驶车辆循迹控制方法,其特征在于:
9.根据权利要求5所述的基于车路协同技术的隧道内自动驾驶车辆循迹控制方法,其特征在于,还包括以下步骤:
10.基于车路协同技术的隧道内自动驾驶车辆循迹控制系统,用于实现如权利要求1-9任一所述的基于车路协同技术的隧道内自动驾驶车辆循迹控制方法,其特征在于,包括:
技术总结
本发明公开一种基于车路协同技术的隧道内自动驾驶车辆循迹控制方法,属于信息处理技术领域;该方法包括:获取车辆数据;获取路侧数据;根据路侧数据,计算得到置信度和路侧定位数据;根据路侧定位数据进行路径规划,得到导航规划路径;根据车辆数据、置信度、路侧定位数据和导航规划路径,对车辆进行导航。本发明还公开一种基于车路协同技术的隧道内自动驾驶车辆循迹控制系统。本发明只需要布设隧道内路侧设备,建立云端融合计算系统,即可为大量自动驾驶车辆提供循迹服务,不需要车辆大规模升级车载设备来解决自动驾驶车辆的隧道内循迹问题。
技术研发人员:朱疆,王伟建,唐嘉伟,曾涛,雄飞,何明,靖传洋
受保护的技术使用者:北京清研宏达信息科技有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!