一种用于仿真测试的超声波仿真板卡及信号处理方法与流程
本发明涉及自动驾驶仿真测试领域,更具体地,涉及一种用于仿真测试的超声波仿真板卡及信号处理方法。
背景技术:
1、随着自动驾驶级别开发越来越高,自动泊车技术也慢慢从l2的自动泊车辅助到l3以上的avp自动代客泊车,感知模块从最初的仅需12个超声波雷达,到加入前视摄像头、360度环视摄像头。
2、其中,超声波传感器与泊车控制器之间的通信由最初的12个探头集成到一个时序模块中,然后以can/lin等通讯方式,将目标信号发送给泊车控制器,下一代超声波传感器一般会使用dsi或其他总线,采用编码发波的方式,需要在域控端加一些特殊的通讯芯片,对探头以及整个系统的搭建都会不一样。同样地,相对于仿真来说,也就由真值信号can/lin注入的方式变为超声波仿真板卡/超声波回波暗箱的仿真方式。目前,超声波仿真板卡开发技术极为稀缺,提出一种开发设计思路以及方法极为重要。
技术实现思路
1、本发明针对现有技术中存在的技术问题,提供一种用于仿真测试的超声波仿真板卡及信号处理方法。
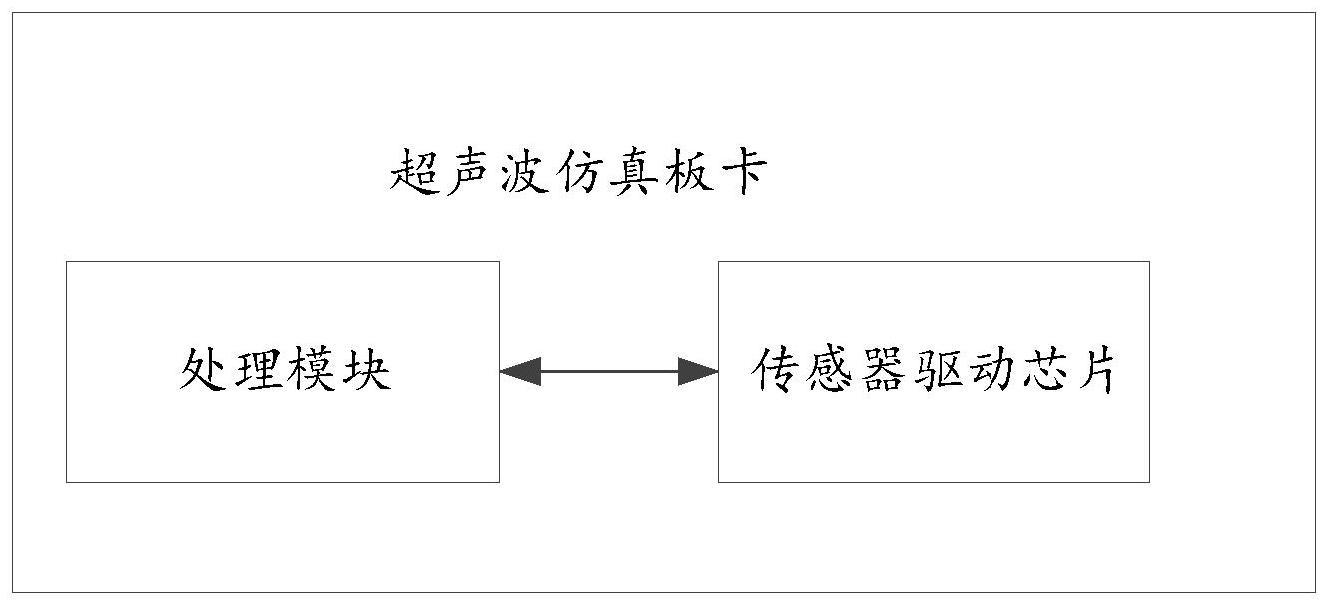
2、根据本发明的第一方面,提供了一种用于仿真测试的超声波仿真板卡,包括处理模块和传感器驱动芯片,所述处理模块通过can/eth与场景仿真系统连接,所述传感器驱动芯片与泊车域控制器通过dsi3总线协议通信;
3、所述处理模块,用于接收所述场景仿真系统发送的车辆周边的目标障碍物距离信号,将所述距离信号处理成回响高电平信号,通过通用异步收发传输器uart串口通信发送给所述传感器驱动芯片;
4、所述传感器驱动芯片,用于将所述回响高电平信号通过dsi3总线协议通信发送给所述泊车域控制器,以供所述泊车域控制器根据所述回响高电平信号进行泊车仿真测试。
5、在上述技术方案的基础上,本发明还可以作出如下改进。
6、可选的,所述场景仿真系统包括仿真场景搭建模块和12路超声波虚拟雷达系统;
7、所述仿真场景搭建模块,用于根据不同的泊车方式,生成对应的泊车仿真场景;
8、每一路所述超声波虚拟雷达系统为根据超声波雷达的实车安装外参,在泊车仿真场景的虚拟车中进行搭建;
9、每一路所述超声波虚拟雷达系统属于多点光线束模式,能够识别超声波识别范围内的目标车车身上多个点,取距离最近的点作为目标障碍物位置。
10、可选的,所述所述处理模块,用于接收所述场景仿真系统发送的车辆周边的目标障碍物距离信号,将所述距离信号处理成回响高电平信号,通过通用异步收发传输器uart串口通信发送给所述传感器驱动芯片,包括:
11、所述处理模块接收到12路超声波虚拟雷达系统发送的车辆周边的目标障碍物距离信号,按照超声波距离公式计算出所述距离信号对应的延迟时间t;
12、依据超声波时序,将所述延迟时间t转换成echo回响高电平持续时间;
13、基于接收的泊车域控制器发出的trigger信号和脉冲振荡信号,通过通用异步收发传输器uart串口通信将所述echo回响高电平持续时间发送给所述传感器驱动芯片。
14、可选的,所述脉冲振荡信号的频率为40khz、48khz或53khz。
15、可选的,所述按照超声波距离公式计算出所述距离信号对应的延迟时间t,包括:
16、s=c*t/2;
17、c=c0+0.607*t;
18、其中,s为目标障碍物距离信息,c为声波速度,受温度影响,t为延迟时间,c0为零度时的声波速度332m/s,t为车辆内的当前室温,单位为℃。
19、可选的,所述处理模块还用于当超声波虚拟雷达系统在虚拟场景视场角范围内没有障碍物时,则将所述延迟时间置零。
20、可选的,所述传感器驱动芯片包括12路dsi3从站,所述泊车域控制器包括12路dsi3主站,所述传感器驱动芯片将12路dsi3从站数据通过dsi3总线协议,与所述泊车控制器的dsi3主站内的12路数据通道形成交互接口。
21、根据本发明的第二方面,提供一种基于超声波仿真板卡的信号处理方法,所述超声波仿真板卡包括处理模块和传感器驱动芯片,所述处理模块通过can/eth与场景仿真系统连接,所述传感器驱动芯片与泊车域控制器通过dsi3总线协议通信,所述信号处理方法包括:
22、处理模块接收所述场景仿真系统发送的车辆周边的目标障碍物距离信号,将所述距离信号处理成回响高电平信号,通过通用异步收发传输器uart串口通信发送给所述传感器驱动芯片;
23、传感器驱动芯片将所述回响高电平信号通过dsi3总线协议通信发送给所述泊车域控制器,以供所述泊车域控制器根据所述回响高电平信号进行泊车仿真测试。
24、可选的,还包括:
25、根据不同的泊车方式,在仿真场景系统中生成对应的泊车仿真场景;
26、根据超声波雷达的实车安装外参,在泊车仿真场景的虚拟车中搭建多路超声波虚拟雷达系统;
27、每一路所述超声波虚拟雷达系统属于多点光线束模式,能够识别超声波识别范围内的目标车车身上多个点,取距离最近的点作为目标障碍物位置。
28、可选的,所述处理模块接收所述场景仿真系统发送的车辆周边的目标障碍物距离信号,将所述距离信号处理成回响高电平信号,通过通用异步收发传输器uart串口通信发送给所述传感器驱动芯片,包括:
29、所述处理模块接收到12路超声波虚拟雷达系统发送的车辆周边的目标障碍物距离信号,按照超声波距离公式计算出所述距离信号对应的延迟时间t;
30、依据超声波时序,将所述延迟时间t转换成echo回响高电平持续时间;
31、基于接收的泊车域控制器发出的trigger信号和脉冲振荡信号,通过通用异步收发传输器uart串口通信将所述echo回响高电平持续时间发送给所述传感器驱动芯片。
32、本发明提供的一种用于仿真测试的超声波仿真板卡及信号处理方法,设计一种处理超声波信号的处理板卡,可用于泊车域控制器硬件在环闭环调试,解决早期算法bug、以及与传感器硬件接口间适配等问题。
技术特征:
1.一种用于泊车域控制器仿真测试的超声波仿真板卡,其特征在于,包括处理模块和传感器驱动芯片,所述处理模块通过can/eth与场景仿真系统连接,所述传感器驱动芯片与泊车域控制器通过dsi3总线协议通信;
2.根据权利要求1所述的超声波仿真板卡,其特征在于,所述场景仿真系统包括仿真场景搭建模块和12路超声波虚拟雷达系统;
3.根据权利要求2所述的超声波仿真板卡,其特征在于,所述所述处理模块,用于接收所述场景仿真系统发送的车辆周边的目标障碍物距离信号,将所述距离信号处理成回响高电平信号,通过通用异步收发传输器uart串口通信发送给所述传感器驱动芯片,包括:
4.根据权利要求3所述的超声波仿真板卡,其特征在于,所述脉冲振荡信号的频率为40khz、48khz或53khz。
5.根据权利要求3所述的超声波仿真板卡,其特征在于,所述按照超声波距离公式计算出所述距离信号对应的延迟时间t,包括:
6.根据权利要求5所述的超声波仿真板卡,其特征在于,所述处理模块还用于当超声波虚拟雷达系统在虚拟场景视场角范围内没有障碍物时,则将所述延迟时间置零。
7.根据权利要求2所述的超声波仿真板卡,其特征在于,所述传感器驱动芯片包括12路dsi3从站,所述泊车域控制器包括12路dsi3主站,所述传感器驱动芯片将12路dsi3从站数据通过dsi3总线协议,与所述泊车控制器的dsi3主站内的12路数据通道形成交互接口。
8.一种基于超声波仿真板卡的信号处理方法,其特征在于,所述超声波仿真板卡包括处理模块和传感器驱动芯片,所述处理模块通过can/eth与场景仿真系统连接,所述传感器驱动芯片与泊车域控制器通过dsi3总线协议通信,所述信号处理方法包括:
9.根据权利要求8所述的信号处理方法,其特征在于,还包括:
10.根据权利要求9所述的信号处理方法,其特征在于,所述处理模块接收所述场景仿真系统发送的车辆周边的目标障碍物距离信号,将所述距离信号处理成回响高电平信号,通过通用异步收发传输器uart串口通信发送给所述传感器驱动芯片,包括:
技术总结
本发明提供一种用于仿真测试的超声波仿真板卡及信号处理方法,板卡包括处理模块和传感器驱动芯片,处理模块通过CAN/Eth与场景仿真系统连接,传感器驱动芯片与泊车域控制器通过DSI3总线协议通信;处理模块接收场景仿真系统发送的目标障碍物距离信号,将距离信号处理成回响高电平信号,通过通用异步收发传输器Uart串口通信发送给传感器驱动芯片;传感器驱动芯片将回响高电平信号通过DSI3总线协议通信发送给泊车域控制器,以供泊车域控制器根据所述回响高电平信号进行泊车仿真测试。本发明设计一种处理超声波信号的处理板卡,可用于泊车域控制器硬件在环闭环调试,解决早期算法bug、以及与传感器硬件接口间适配等问题。
技术研发人员:李森林,郑卫民,彭乐园
受保护的技术使用者:武汉光庭信息技术股份有限公司
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!