一种多无人机协同定位飞行引导方法与流程
本发明涉及多平台协同探测飞行引导,具体涉及一种多无人机协同定位飞行引导方法。
背景技术:
1、随着无人平台向体系化、网络化、智能化方向发展,多平台机载传感器的使用方式也从单平台、单传感器对目标探测,向多平台多传感器协同探测的方向发展。
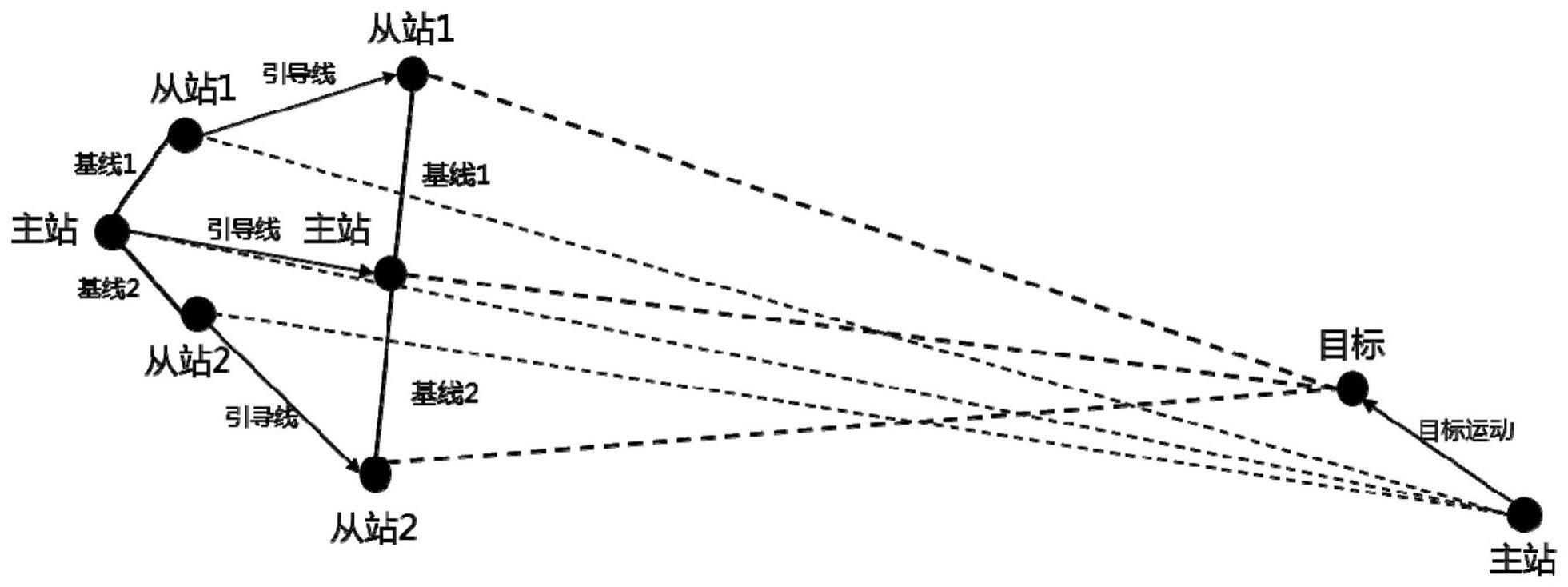
2、协同定位平台分为定位主站和定位从站,主站和从站之间的距离为定位基线,基线以及各定位平台与目标的连线反映了定位的几何构型。多无人机进行无源定位时,定位精度和定位平台与目标辐射源之间的几何构型紧密相关。一般而言,当定位平台之间的基线长度越大,定位精度越高;对于双机交叉定位,当主站、从站与目标之间以等腰三角形构型时,定位精度高;对于三机时差定位,当两个定位从站与目标之间以等腰三角形构型、且定位从站位于两个定位从站的中点时,定位精度高。
3、协同定位的理想几何构型除了考虑定位精度条件之外,还需要考虑达成理想几何构型的时间、定位平台之间的通信距离等约束条件。例如,基线长度越大定位精度越高,但为获得较大的基线距离,平台的飞行距离和时间也可能增大,导致耗费更长的飞行时间;同时,机间通信的质量和有效性也受到通信距离的影响。因此,定位平台的理想几何构型需要满足探测精度要求,也需要符合飞行时间和通信距离的约束。
4、为了使定位平台与目标辐射源之间的当前几何构型向理想几何构型演进,需要对定位平台进行飞行引导。具体而言,需要合理设置定位平台之间的基线距离、飞行引导期望点,以及朝着期望点靠近所需的引导航向、引导速度和引导高度。在当前几何构型向理想几何构型演进的过程中,为保持定位平台对目标辐射源的持续、稳定探测,还需要满足传感器的探测范围约束,保持目标在定位平台传感器的探测范围之内。
技术实现思路
1、本发明的目的是提供一种多无人机协同定位飞行引导方法,用以以满足无源定位的定位精度要求、保持无源定位的理想几何构型、减少航路引导到达理想几何构型的时间、保持无源探测的稳定性。
2、为了实现上述任务,本发明采用以下技术方案:
3、一种多无人机协同定位飞行引导方法,包括:
4、步骤1,建立无源定位能力专家知识库,包括定位精度模型、平台通信范围、平台飞行能力模型、传感器探测范围;
5、步骤2,获取当前时刻各定位平台位置参数;
6、步骤3,计算当前时刻定位编队参考点;
7、步骤4,获取目标当前时刻位置参数,根据目标运动方式估计下一时刻目标位置;
8、步骤5,计算下一时刻定位编队参考点位置;
9、步骤6,根据定位精度要求,利用定位精度模型计算下一时刻定位平台基线期望点;
10、步骤7,根据平台飞行能力模型的约束,计算下一时刻定位平台飞行修正期望点;
11、步骤8,根据平台通信范围的约束,计算下一时刻定位平台通信修正期望点;
12、步骤9,根据定位平台探测能力约束,计算下一时刻定位平台探测修正期望点;
13、步骤10,重复步骤7、8、9,直到每个步骤均不再有新的修正,或迭代次数达到最大迭代次数后进行下一步,否则返回步骤2;
14、步骤11,输出下一时刻各定位平台的期望点位置、引导航向、引导速度和引导高度。
15、进一步地,所述定位精度模型中存储的参数为传感器类型、定位平台数、目标距离和定位精度,以及在所述参数下对应的基线长度;
16、所述平台通信范围给定了定位平台之间通信的距离约束;
17、所述平台飞行能力模型为平台所能够飞行的速度范围、高度范围;
18、所述传感器探测范围给出了传感器的探测距离范围、方位角范围和俯仰角范围。
19、进一步地,计算各个定位平台的几何中心,作为当前时刻所处位置的定位编队参考点。
20、进一步地,所述获取目标当前时刻位置参数,根据目标运动方式估计下一时刻目标位置,包括:
21、获取目标三维坐标和三向速度,估计目标当前位置;
22、若已获取目标信息包含三维坐标,则使用此坐标;若已获取目标信息仅包含相对某一定位平台的方位和俯仰角度,则根据专家知识库中的传感器探测范围,估计目标距离,根据目标距离估算目标三维坐标;
23、估计目标下一时刻位置:
24、若已获取目标信息包含三向速度信息,则在目标当前位置基础上,使用匀速运动模型外推,获得下一时刻目标位置;若已获取目标信息不包含三向速度信息,则以目标当前位置作为下一时刻位置的估计值。
25、进一步地,所述计算下一时刻定位编队参考点位置,包括:
26、基于定位平台的位置参数,按照定位平台的飞行速度和引导时间间隔,估计参考点向目标方向推进的参考距离;以当前时刻的参考点位置,在参考点与目标连线方向上推进参考距离,获得下一时刻定位编队参考点位置。
27、进一步地,所述根据定位精度要求,利用定位精度模型计算下一时刻定位平台基线期望点,包括:
28、利用定位平台的位置参数计算下一时刻参考点与目标之间的距离;
29、查询定位知识库,根据所需的传感器类型、定位平台数、目标距离和定位精度,通过定位精度模型获得参考基线长度;
30、根据下一时刻参考点位置和参考基线长度,计算下一时刻各定位平台的基线期望点;
31、根据各定位平台当前位置与各基线期望点之间的距离关系,以距离方差最小为目标函数,完成各定位平台与基线期望点之间的配对;
32、根据配对结果,获得下一时刻各定位平台基线期望点。
33、进一步地,所述根据平台飞行能力模型的约束,计算下一时刻定位平台飞行修正期望点,包括:
34、对每一个定位平台,执行如下操作:
35、根据各定位平台当前位置和基线期望点,计算飞行距离以及应飞的三向速度方向;查询定位知识库中的平台飞行能力模型:
36、若飞行距离在定位平台飞行能力之内,则以基线期望点作为飞行修正期望点;若飞行距离在定位平台飞行能力之外,则在速度方向改变飞行距离,获得飞行修正期望点。
37、进一步地,所述根据平台通信范围的约束,计算下一时刻定位平台通信修正期望点,包括:
38、对每一个定位从站,执行如下操作:
39、计算各定位从站飞行修正期望点与定位主站之间的距离,并查询定位知识库中的平台通信范围:
40、若飞行修正期望点在定位主站的飞行修正期望点的通信范围之内,则以飞行修正期望点作为通信修正期望点;若飞行修正期望点在定位主站的飞行修正期望点的通信范围之外,则在连线方向上将飞行修正期望点修正到通信范围边界,作为通信修正期望点。
41、进一步地,所述根据定位平台探测能力约束,计算下一时刻定位平台探测修正期望点,包括:
42、对每一个定位平台,执行如下操作:
43、计算各定位平台当前位置到通信修正期望点之间的连线矢量;
44、计算各定位平台通信修正期望点与目标之间的连线矢量;
45、计算前述两步骤矢量之间的夹角;
46、查询定位知识库中的定位平台探测能力;若夹角范围在定位平台探测能力之内,则将通信修正期望点作为探测修正期望点。
47、进一步地,所述输出下一时刻各定位平台的期望点位置、引导航向、引导速度和引导高度,包括:
48、将最终的探测修正期望点作为各定位平台的期望点位置;
49、根据各定位平台当前位置和期望点位置和引导周期,计算得到引导航向、引导速度和引导高度值。
50、与现有技术相比,本发明具有以下技术特点:
51、1.本发明方法实现飞行引导的理想几何构型、定位平台基线、飞行引导期望点、引导航向、引导速度和引导高度的计算。
52、2.本发明可以满足无源定位的定位精度要求、保持无源定位的理想几何构型、减少航路引导到达理想几何构型的时间、保持无源探测的稳定性。
- 还没有人留言评论。精彩留言会获得点赞!