一种管道巡检无人机路径规划方法
本发明属于巡检无人机领域,具体涉及一种管道巡检无人机路径规划方法。
背景技术:
1、石油与天然气是国家重要的战略资源,而管道是油气资源配送的主要方式。我国幅员辽阔,管道横跨东西、纵贯南北,管道的安全运行对国民经济发展有着重要意义。目前,对油气管道的巡检通常以人工巡检为主,但常规的人工巡检方式巡检效率低、消耗人力巨大。随着无人机技术的快速发展,无人机凭借其自身便携、易操控等特点,已经初步应用在油气管道巡检任务中,弥补了人工巡检的局限性,提升了巡检效率。
2、无人机油气管道巡检任务分为高空巡检和低空巡检,其中通常利用多旋翼无人机对管道进行精细化低空巡检,巡检对象主要包括管道本身、锚固墩、支架等。无人机根据巡检任务的不同在管道顶部或者侧面进行近距离飞行,巡检过程中管道自身、锚固墩和支架会成为飞行过程中的障碍物。因此,如何选择合适的飞行路径规避这些障碍物,不仅可以节省无人机的飞行时间,同时可以提高巡检质量。
3、快速扩展随机树(rrt)是一种基于采样的路径规划算法,以起始点为根节点,采用随机取样的方法在规划空间内扩展成随机树,并在随机树中找到一条由起始点到目标点的路径。这种方法能够有效的搜索高维空间,适合复杂环境中的路径规划。鲸鱼优化算法(woa)是近年来提出的一种高效的群智能优化算法,已经被广泛应用到路径规划、工程优化等问题中。
技术实现思路
1、针对现有技术存在的上述问题,本发明实施例提供一种管道巡检无人机路径规划方法。
2、一种管道巡检无人机路径规划方法,包括步骤如下:
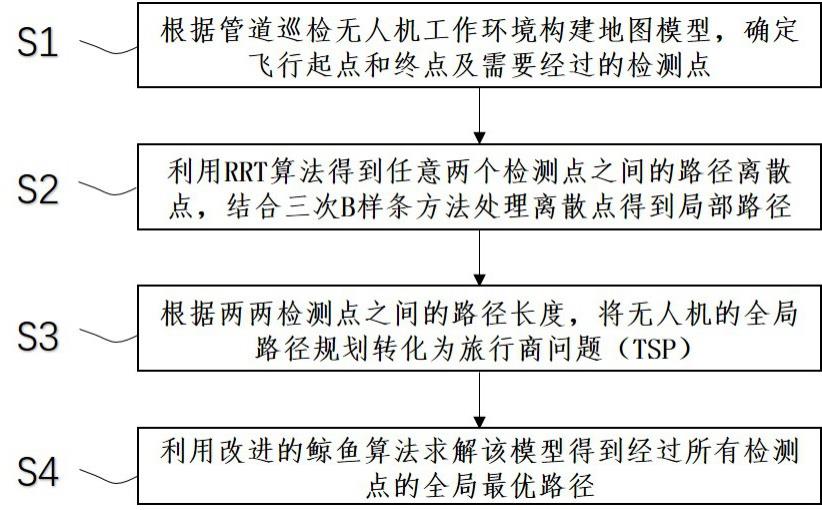
3、步骤s1:根据管道巡检无人机工作环境构建地图模型,确定飞行起点
4、和终点及需要经过的检测点;
5、步骤s2:利用rrt算法得到任意两个检测点之间的路径离散点,并利用三次b样条方法处理离散点得到局部路径;
6、步骤s3:根据两两检测点之间的路径长度,将无人机的全局路径规划转化为旅行商问题(tsp)并建立数学模型;
7、步骤s4:利用改进的鲸鱼算法求解该模型得到经过所有检测点的全局最优路径;
8、优选地,所述步骤s1包括:无人机预先在管道上空飞行,利用传感器采集管道及其周围环境模型信息并建立地图,在地图中确定飞行的起点和终点及管道周围需要检测的目标点。
9、优选地,所述步骤s2包括:其特征在于步骤s2包括:通过rrt算法在任意两个检测点之间规划路径,得到两点之间的离散路径点;离散路径点利用三次b样条方法处理离散路径点,得到平滑连续的局部路径。
10、优选地,所述步骤s3包括:根据任意两点之间的路径长度建立距离矩阵,将无人机的全局路径规划转化为首尾确定的旅行商问题(tsp)。
11、优选地,所述改进的鲸鱼算法中引入高斯扰动,高斯公式如下:
12、引入高斯扰动后,收缩包围公式变为:;
13、螺旋气泡网捕食公式变为:;
14、随机搜索猎物公式变为:;
15、式中g(0,1)代表均值为0,方差为1服从高斯分布的随机数。
16、本发明还提供了一种计算机设备,包括存储器和处理器,所述存储器存储有计算机程序,其特征在于,所述处理器执行所述计算机程序时实现权利要求1至5中任一项所述管道巡检无人机路径规划方法的步骤。
17、本发明还提供了一种计算机可读存储介质,其上存储有计算机程序,其特征在于,所述计算机程序被处理器执行时实现权利要求1至5中任一项所述管道巡检无人机路径规划方法的步骤。
18、与现有技术相比,本发明具有如下的有益效果:本发明提出管道无人机路径规划方法,建立管道巡检无人机精细化巡检的地图模型,确定起点和终点以及需要经过的检测点,利用三次b样条曲线法优化rrt算法生成的两点间的路径离散点,获取平滑路径和距离;本发明通过采用改进的woa算法,引入高斯扰动,提高全局搜索能力,获得更短的巡检路径,进一步提高无人机巡检效率。
技术特征:
1.一种管道巡检无人机路径规划方法,其特征在于,包括步骤如下:
2.根据权利要求1所述的管道巡检无人机路径规划方法,其特征在于步骤s1包括:无人机预先在管道上空飞行,利用传感器采集管道及其周围环境模型信息并建立地图,在地图中确定飞行的起点和终点及管道周围需要检测的目标点。
3.根据权利要求1所述的管道巡检无人机路径规划方法,其特征在于步骤s2包括:通过改进rrt算法在任意两个检测点之间规划路径,得到两点之间的离散路径点;离散路径点利用三次b样条方法处理离散路径点,得到平滑连续的局部路径。
4.根据权利要求1所述的管道巡检无人机路径规划方法,其特征在于步骤s3包括:根据任意两点之间的路径长度建立距离矩阵,将无人机的全局路径规划转化为首尾确定的旅行商问题(tsp)。
5.根据权利要求1所述的管道巡检无人机路径规划方法,其特征在于所述改进的鲸鱼算法中引入高斯扰动,高斯公式如下:;引入高斯扰动后,收缩包围公式变为:;螺旋气泡网捕食公式变为;随机搜索猎物公式变为:;式中g(0,1)代表均值为0,方差为1服从高斯分布的随机数。
6.一种计算机设备,包括存储器和处理器,所述存储器存储有计算机程序,其特征在于,所述处理器执行所述计算机程序时实现权利要求1至5中任一项所述管道巡检无人机路径规划方法的步骤。
7.一种计算机可读存储介质,其上存储有计算机程序,其特征在于,所述计算机程序被处理器执行时实现权利要求1至5中任一项所述管道巡检无人机路径规划方法的步骤。
技术总结
本发明提供了一种管道巡检无人机路径规划方法,包括:根据管道巡检无人机工作环境构建地图模型,确定飞行起点和终点及巡检过程中需要经过的检测点,利用RRT算法得到任意两个检测点之间的路径离散点,并利用三次B样条方法处理离散点得到局部路径,根据两两检测点之间的路径长度,将无人机的全局路径规划转化为旅行商问题(TSP)并建立数学模型,利用改进的鲸鱼算法求解该模型得到巡检所有检测点的全局最优路径。本发明有效解决了无人机在精细化管道巡检过程中的路径规划问题,提高了巡检效率。
技术研发人员:屈文涛,谢韩彧,张丹
受保护的技术使用者:西安石油大学
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!