无人机飞行控制方法、无人机及计算机可读存储介质与流程
本申请实施例涉及无人机,尤其涉及一种无人机飞行控制方法、无人机及计算机可读存储介质。
背景技术:
1、无人机即无人驾驶飞机,在飞行过程中,采用卫星定位、遥感、地理空间、航空航天、自动控制、计算机辅助分析等技术,控制飞行状态,可应用农业、林业、测绘、交通等多个领域
2、现有技术中,无人机基本采用根据水平和垂直方向的距离,通过控制速度来规划飞行过程,参与规划参数较少,对飞行过程的规划较粗略,规划效果较差。
技术实现思路
1、本申请实施例提供一种无人机飞行控制方法、无人机及计算机可读存储介质,可通过飞行过程中较多的飞行规划参数,预测无人机较为详细的未来飞行速度信息,控制效果好。
2、本申请实施例一方面提供了一种无人机飞行控制方法,包括:
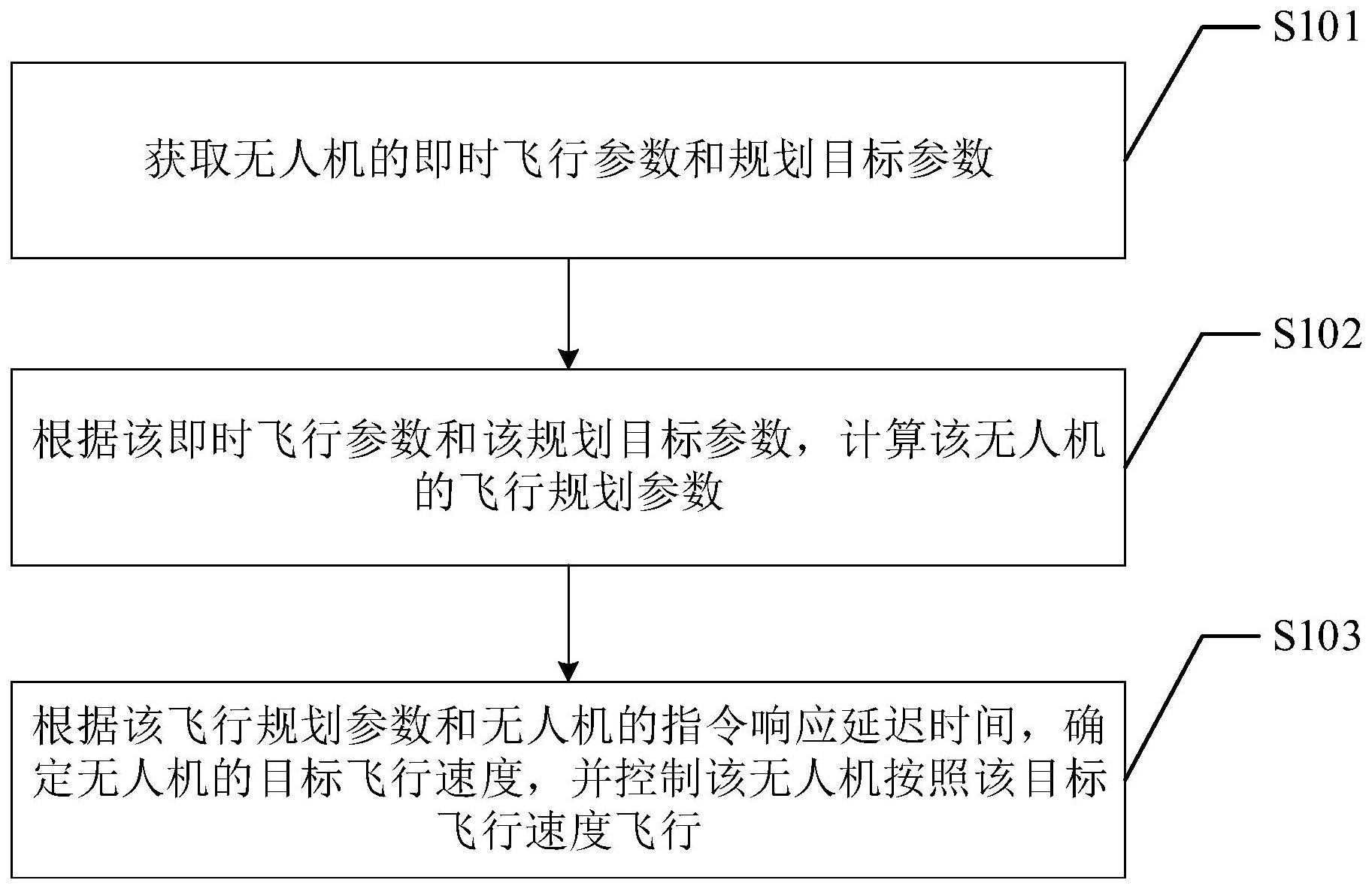
3、获取无人机的即时飞行参数和规划目标参数;
4、根据所述即时飞行参数和所述规划目标参数,计算所述无人机的飞行规划参数;
5、根据所述飞行规划参数和所述无人机的指令响应延迟时间,确定无人机的指令飞行速度,并控制所述无人机按照所述指令飞行速度飞行。
6、本申请实施例一方面还提供了一种无人机,包括:
7、获取模块,用于获取无人机的即时飞行参数和规划目标参数;
8、处理模块,用于根据所述即时飞行参数和所述规划目标参数,计算所述无人机的飞行规划参数;
9、所述处理模块,还用于根据所述飞行规划参数和所述无人机的指令响应延迟时间,确定无人机的指令飞行速度,并控制所述无人机按照所述指令飞行速度飞行。
10、本申请实施例一方面还提供了一种无人机,包括:
11、存储器和处理器;
12、所述存储器存储有可执行计算机程序;
13、与所述存储器耦合的所述处理器,调用所述存储器中存储的所述可执行计算机程序,执行如上述无人机飞行控制方法中的各步骤。
14、本申请实施例一方面还提供一种计算机可读存储介质,其上存储有计算机程序,所述计算机程序在被处理器运行时,实现如上述实施例提供的无人机飞行控制方法。
15、从上述本申请各实施例可知,获取并根据无人机的即时飞行参数和规划目标参数,得到无人机的飞行规划参数,根据飞行规划参数和无人机的指令响应延迟时间,确定无人机的指令飞行速度,并控制无人机按照该指令飞行速度飞行,通过无人机当前的即时飞行参数和未来的规划目标参数,得到飞行规划参数,根据飞行规划参数确定指令响应延迟时间,并根据飞行规划参数和指令响应延迟时间确定无人机到达到目标位置需要的速度,可预计无人机未来的飞行速度等飞行参数,较好的达到在无人机的飞行全程灵活地控制无人机飞行的效果。
技术特征:
1.一种无人机飞行控制方法,其特征在于,包括:
2.根据权利要求1所述的方法,其特征在于,所述获取无人机的即时飞行参数和规划目标参数包括:
3.根据权利要求2所述的方法,其特征在于,所述根据所述即时飞行参数和所述规划目标参数,计算所述无人机的飞行规划参数包括:
4.根据权利要求3所述的方法,其特征在于,所述根据所述飞行规划参数和所述无人机的指令响应延迟时间,确定无人机的指令飞行速度包括:
5.根据权利要求2所述的方法,其特征在于,所述根据所述即时飞行参数和所述规划目标参数,计算所述无人机的飞行规划参数之后包括:
6.根据权利要求5所述的方法,其特征在于,所述据所述飞行规划参数得到所述无人机的最大目标速度包括:
7.根据权利要求5所述的方法,其特征在于,所述根据所述飞行规划参数得到所述无人机的最大目标速度之后包括:
8.一种无人机,其特征在于,包括:
9.一种无人机,其特征在于,包括:
10.一种计算机可读存储介质,其上存储有计算机程序,其特征在于,所述计算机程序被处理器执行时,实现如权利要求1-7任一项所述的无人机飞行控制方法。
技术总结
一种无人机飞行控制方法、无人机及计算机可读存储介质,其中该方法包括:获取无人机的即时飞行参数和规划目标参数,根据即时飞行参数和规划目标参数,计算无人机的飞行规划参数,根据飞行规划参数和无人机的指令响应延迟时间,确定无人机的指令飞行速度,并控制无人机按照指令飞行速度飞行。该方法可提高对无人机飞行速度的控制效果。
技术研发人员:王渊生,宋亮
受保护的技术使用者:深圳飞马机器人科技有限公司
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!