路线规划方法、装置、割草机器人以及存储介质与流程
本申请涉及割草机器人,具体涉及一种路线规划方法、装置、割草机器人以及存储介质。
背景技术:
1、割草机器人被广泛应用于家庭庭院草坪的维护和大型草地的修剪,割草机器人融合了运动控制、多传感器融合以及路径规划等技术。为了保证割草机器人能够持续工作,需要在割草机器人完成割草任务后或者电量过低时,将割草机器人切换至路线规划模式,使其自动回到充电桩进行充电。
2、然而,目前路线规划的方案大多数仅适用于单一的区域,无法在多个区域上进行回充,而针对多区域回充的方案需要在每个工作区域上设置一个充电桩,并且,采用沿边寻桩和埋线的方式使用的是固定路线,回充返航的效率较差。
技术实现思路
1、本申请实施例提供一种路线规划方法、装置、割草机器人以及存储介质,可以跨区域控制割草机器人进行回充,并且不需要采用沿边寻桩和埋线的方式,由此,可以提升回充返航的效率。
2、第一方面,本申请实施例提供了一种路线规划方法,应用于割草机器人,包括:
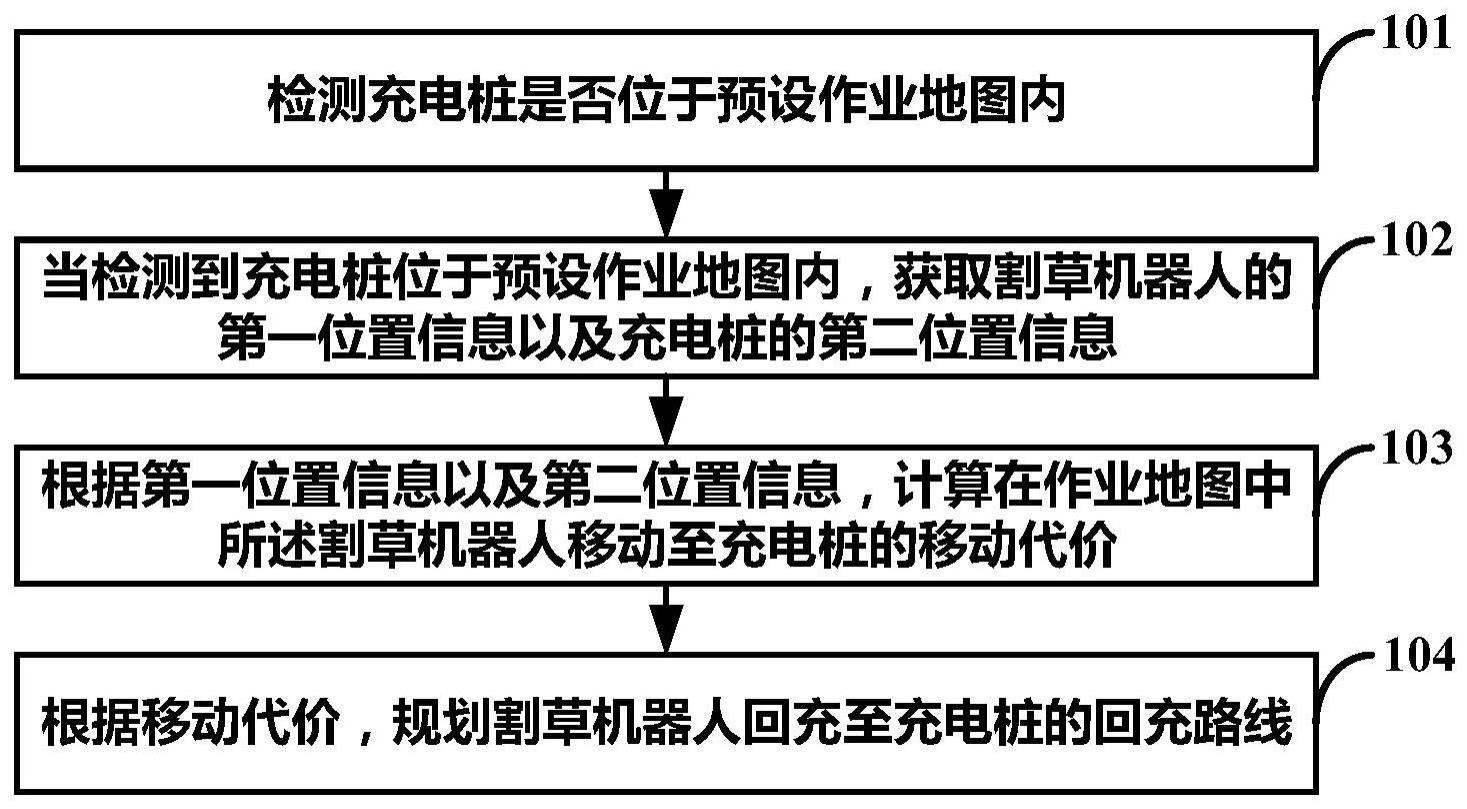
3、检测以及充电桩是否位于预设作业地图内;
4、当检测到所述充电桩位于预设作业地图内,获取所述割草机器人的第一位置信息以及所述充电桩的第二位置信息;
5、根据所述第一位置信息以及第二位置信息,计算在所述作业地图中所述割草机器人移动至所述充电桩的移动代价;
6、根据所述移动代价,规划所述割草机器人移动至所述充电桩的移动路线。
7、可选地,在一些实施例中,所根据所述第一位置信息以及第二位置信息,计算在所述作业地图中所述割草机器人移动至所述充电桩的移动代价,包括:
8、根据所述第一位置信息和第二位置信息,检测所述割草机器人与所述充电桩是否位于所述作业地图上不同的工作区域中;
9、当检测到所述割草机器人与所述充电桩位于所述作业地图上不同的工作区域中时,确定所述作业地图所包含的工作区域;
10、将确定的工作区域转换为区域节点,并构建不同区域节点之间的移动路径;
11、根据所述第一位置信息、区域节点以及不同区域节点之间的移动路径,计算在所述作业地图中所述割草机器人移动至所述充电桩的移动代价。
12、可选地,在一些实施例中,所述根据所述第一位置信息、第二位置信息、区域节点以及不同区域节点之间的移动路径,计算在所述作业地图中所述割草机器人移动至所述充电桩的移动代价,包括:
13、识别不同区域节点之间的移动路径对应的路径距离;
14、根据所述第一位置信息,确定所述割草机器人对应的移动路径;
15、计算所述割草机器人移动至对应的移动路径的移动距离;
16、基于所述第二位置信息、路径距离以及移动距离,计算在所述作业地图中所述割草机器人移动至所述充电桩的移动代价。
17、可选地,在一些实施例中,还包括:
18、当检测到所述割草机器人与所述充电桩位于所述作业地图上相同的工作区域中时,将相同的工作区域确定为目标区域;
19、获取所述目标区域的栅格地图;
20、基于所述第一位置信息、第二位置信息以及预设算法,在所述栅格地图中规划所述割草机器人移动至所述充电桩的移动路线。
21、可选地,在一些实施例中,所述根据所述移动代价,规划所述割草机器人移动至所述充电桩的移动路线,包括:
22、根据所述移动代价,创建最短路线对应的第一节点集合以及未遍历的第二节点集合;
23、在所述第二节点集合中选择移动代价最小的节点添加至第一节点集合中,得到更新后第一节点集合;
24、对更新后第一节点集合中的节点进行反向探索,得到所述割草机器人移动至所述充电桩的移动路线。
25、可选地,在一些实施例中,所述对更新后第一节点集合中的节点进行反向探索,得到所述割草机器人移动至所述充电桩的移动路线,包括:
26、在更新后第一节点集合中确定目标节点;
27、遍历所述目标节点相邻的相邻节点,并将移动代价最小的相邻节点确定为所述目标节点的连接节点;
28、将所述连接节点确定为基准节点,并返回执行遍历所述目标节点相邻的相邻节点的步骤,直至输出反向路线为止;
29、将所述反向路线取反,得到所述割草机器人移动至所述充电桩的移动路线。
30、可选地,在一些实施例中,还包括:
31、当识别到所述移动路线中存在堵塞时,确定所述堵塞的区域为堵塞工作区域;
32、基于所述堵塞工作区域上一个工作区域为基准,规划所述割草机器人移动至所述充电桩的移动路线。
33、第二方面,本申请实施例提供了一种路线规划装置,应用于割草机器人,包括:
34、检测模块,用于检测充电桩是否位于预设作业地图内;
35、获取模块,用于当检测到所述充电桩位于预设作业地图内,获取所述割草机器人的第一位置信息以及所述充电桩的第二位置信息;
36、计算模块,用于根据所述第一位置信息以及第二位置信息,计算在所述作业地图中所述割草机器人移动至所述充电桩的移动代价;
37、规划模块,用于根据所述移动代价,规划所述割草机器人移动至所述充电桩的移动路线。
38、第三方面,本申请实施例提供了一种割草机器人,包括存储器,处理器及存储在存储器上并可在处理器上运行的计算机程序,所述处理器执行所述程序时实现如上所述路线规划方法的步骤。
39、第四方面,本申请实施例提供了一种存储介质,其上存储有计算机程序,所述计算机程序被处理器执行时实现如上所述路线规划方法的步骤。
40、本申请提供一种路线规划方法、装置、割草机器人以及存储介质,在检测充电桩是否位于预设作业地图内,当检测到所述充电桩位于预设作业地图内,获取所述割草机器人的第一位置信息以及所述充电桩的第二位置信息,接着,根据所述第一位置信息以及第二位置信息,计算在所述作业地图中所述割草机器人移动至所述充电桩的移动代价,最后,根据所述移动代价,规划所述割草机器人移动至所述充电桩的移动路线。本申请提供的路线规划方案,可以根据第一位置信息以及第二位置信息,计算在作业地图中割草机器人移动至充电桩的移动代价,利用移动代价进行路线规划,实现,跨区域控制割草机器人进行回充,并且不需要采用沿边寻桩和埋线的方式,由此,可以提升回充返航的效率。
技术特征:
1.一种路线规划方法,应用于割草机器人,其特征在于,包括:
2.根据权利要求1所述的方法,其特征在于,所根据所述第一位置信息以及第二位置信息,计算在所述作业地图中所述割草机器人移动至所述充电桩的移动代价,包括:
3.根据权利要求2所述的方法,其特征在于,所述根据所述第一位置信息、第二位置信息、区域节点以及不同区域节点之间的移动路径,计算在所述作业地图中所述割草机器人移动至所述充电桩的移动代价,包括:
4.根据权利要求2所述的方法,其特征在于,还包括:
5.根据权利要求1所述的方法,其特征在于,所述根据所述移动代价,规划所述割草机器人移动至所述充电桩的移动路线,包括:
6.根据权利要求5所述的方法,其特征在于,所述对更新后第一节点集合中的节点进行反向探索,得到所述割草机器人移动至所述充电桩的移动路线,包括:
7.根据权利要求6所述的方法,其特征在于,还包括:
8.一种路线规划装置,应用于割草机器人,其特征在于,包括:
9.一种割草机器人,其特征在于,包括存储器,处理器及存储在存储器上并可在处理器上运行的计算机程序,所述处理器执行所述程序时实现如权利要求1-7任一项所述路线规划方法的步骤。
10.一种存储介质,其特征在于,其上存储有计算机程序,所述计算机程序被处理器执行时实现如权利要求1-7任一项所述路线规划方法的步骤。
技术总结
本申请实施例公开了一种路线规划方法、装置、割草机器人以及存储介质,包括:检测充电桩是否位于预设作业地图内;当检测到所述充电桩位于预设作业地图内,获取所述割草机器人的第一位置信息以及所述充电桩的第二位置信息;根据所述第一位置信息以及第二位置信息,计算在所述作业地图中所述割草机器人移动至所述充电桩的移动代价;根据所述移动代价,规划所述割草机器人移动至所述充电桩的移动路线。本申请提供的路线规划方案,可以跨区域控制割草机器人进行回充,并且不需要采用沿边寻桩和埋线的方式,由此,可以提升回充返航的效率。
技术研发人员:魏基栋,何子俊,华锦峰
受保护的技术使用者:松灵机器人(深圳)有限公司
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!