无人机巡检方法、装置、无人机、电子设备及存储介质与流程
本发明涉及无人机,尤其涉及一种无人机巡检方法、装置、无人机、电子设备及存储介质。
背景技术:
1、目前,无人机已被广泛应用于电力线路、大型设备等对象的巡检。
2、现有的巡检方法通常是,指定电力巡线人员根据作业计划带着无人机去现场,手动操作无人机对目标对象进行飞行检查。当发现目标对象存在异常点后记录异常点的相关信息,并继续巡检。
3、然而,记录的相关信息有限,依然需要电力巡线人员进行后续的复检工作,增加了人工成本。
技术实现思路
1、本发明提供一种无人机巡检方法、装置、无人机、电子设备及存储介质,用以解决现有技术中存在的缺陷。
2、本发明提供一种无人机巡检方法,包括:
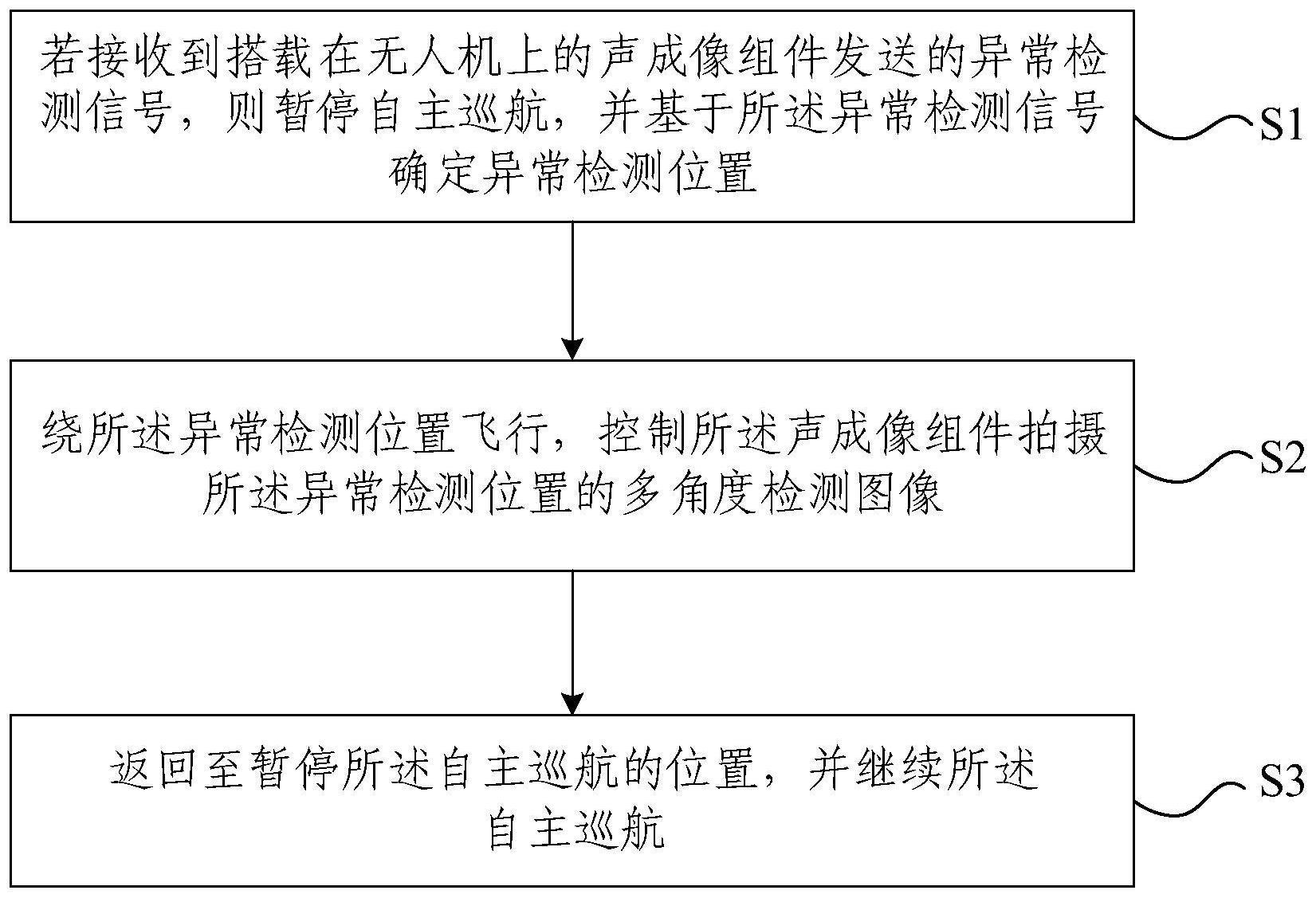
3、若接收到搭载在无人机上的声成像组件发送的异常检测信号,则暂停自主巡航,并基于所述异常检测信号确定异常检测位置;
4、绕所述异常检测位置飞行,控制所述声成像组件拍摄所述异常检测位置的多角度检测图像;
5、返回至暂停所述自主巡航的位置,并继续所述自主巡航。
6、根据本发明提供的一种无人机巡检方法,绕所述异常检测位置飞行,控制所述声成像组件拍摄所述异常检测位置的多角度检测图像,包括:
7、确定所述声成像组件相对于所述异常检测位置的多个不同角度的拍摄点位,并规划绕所述异常检测位置依次飞行至每个拍摄点位的飞行路径;
8、沿所述飞行路径飞行,并在到达每个拍摄点位时控制所述声成像组件朝向所述异常检测位置,拍摄对应角度的检测图像。
9、根据本发明提供的一种无人机巡检方法,沿所述飞行路径飞行,包括:
10、若任一拍摄点位的预设范围内存在障碍物,则跳过所述任一拍摄点位,继续飞行至下一拍摄点位;
11、若任一拍摄点位的预设范围外存在障碍物,则重新规划到所述任一拍摄点位的子飞行路径,并沿所述子飞行路径飞行至所述任一拍摄点位。
12、根据本发明提供的一种无人机巡检方法,确定所述声成像组件相对于所述异常检测位置的多个不同角度的拍摄点位,包括:
13、确定以所述异常检测位置为中心的预设球面,并在所述预设球面上均匀布设所述拍摄点位;
14、其中,所述预设球面的半径为接收到所述异常检测信号时的无人机位置与所述异常检测位置之间的距离的预设倍数。
15、根据本发明提供的一种无人机巡检方法,所述异常检测信号包括异常声源的方位信息和距离信息;
16、相应地,基于所述异常检测信号确定异常检测位置,包括:
17、确定接收到所述异常检测信号时的无人机位置;
18、基于所述无人机位置、所述方位信息和所述距离信息,确定所述异常检测位置。
19、本发明还提供一种无人机巡检装置,包括:
20、计算模块,用于若接收到搭载在无人机上的声成像组件发送的异常检测信号,则暂停自主巡航,并基于所述异常检测信号确定异常检测位置;
21、控制模块,用于绕所述异常检测位置飞行,控制所述声成像组件拍摄所述异常检测位置的多角度检测图像;
22、巡航模块,用于返回至暂停所述自主巡航的位置,并继续所述自主巡航。
23、本发明还提供一种无人机,包括:无人机本体和声成像组件,所述声成像组件搭载在所述无人机本体上,且所述声成像组件与所述无人机本体通信连接;
24、所述声成像组件用于采集所述无人机本体的巡检路径上的声波信号,并在声波信号异常时向所述无人机本体发送异常检测信号;
25、所述无人机本体用于在接收到所述异常检测信号时,执行上述的无人机巡检方法。
26、根据本发明提供的一种无人机,还包括:所述无人机本体对应的遥控端,所述遥控端配置有显示模块,所述声成像组件与所述遥控端通信连接;
27、所述声成像组件还用于生成实时视频信号,并在声波信号异常时生成热力图,将所述热力图叠加至所述实时视频信号,得到叠加信号;
28、所述声成像组件还用于将所述叠加信号发送至所述遥控端,通过所述显示模块进行显示。
29、根据本发明提供的一种无人机,还包括:所述无人机本体对应的遥控端,所述遥控端配置有显示模块,所述声成像组件与所述遥控端通信连接;
30、所述声成像组件还用于生成实时视频信号,将所述实时视频信号发送至所述遥控端,并在声波信号异常时向所述遥控端发送所述异常检测信号;
31、所述遥控端还用于基于所述异常检测信号,生成热力图,将所述热力图叠加至所述实时视频信号,得到叠加信号,并通过所述显示模块进行显示。
32、本发明还提供一种电子设备,包括存储器、处理器及存储在存储器上并可在处理器上运行的计算机程序,所述处理器执行所述计算机程序时实现如上述任一种所述的无人机巡检方法。
33、本发明还提供一种非暂态计算机可读存储介质,其上存储有计算机程序,该计算机程序被处理器执行时实现如上述任一种所述的无人机巡检方法。
34、本发明还提供一种计算机程序产品,包括计算机程序,所述计算机程序被处理器执行时实现如上述任一种所述的无人机巡检方法。
35、本发明提供的无人机巡检方法、装置、无人机、电子设备及存储介质,该方法首先在若接收到搭载在无人机上的声成像组件发送的异常检测信号之后,暂停自主巡航,并基于异常检测信号确定异常检测位置;然后绕异常检测位置飞行,控制声成像组件拍摄异常检测位置的多角度检测图像;最后返回至暂停自主巡航的位置,并继续自主巡航。该无人机巡检方法可以通过无人机是否接收到异常检测信号实现对巡航状态的智能切换,并在智能切换后可以拍摄得到异常检测位置的多角度检测图像,可以为专业巡检人员提供充足的异常检测位置的图像信息,使专业巡检人员不通过复检即可得到充足的信息,可以大大降低专业巡检人员的工作量,降低人工成本,提高巡检效率。不仅如此,由于在一次巡检过程中获取了一次检测位置及其多角度检测图像,强化了巡检过程的有效性,避免通过多次巡检过程实现导致的资源浪费的现象出现。
技术特征:
1.一种无人机巡检方法,其特征在于,包括:
2.根据权利要求1所述的无人机巡检方法,其特征在于,绕所述异常检测位置飞行,控制所述声成像组件拍摄所述异常检测位置的多角度检测图像,包括:
3.根据权利要求2所述的无人机巡检方法,其特征在于,沿所述飞行路径飞行,包括:
4.根据权利要求2所述的无人机巡检方法,其特征在于,确定所述声成像组件相对于所述异常检测位置的多个不同角度的拍摄点位,包括:
5.根据权利要求1-4中任一项所述的无人机巡检方法,其特征在于,所述异常检测信号包括异常声源的方位信息和距离信息;
6.一种无人机巡检装置,其特征在于,包括:
7.一种无人机,其特征在于,包括:无人机本体和声成像组件,所述声成像组件搭载在所述无人机本体上,且所述声成像组件与所述无人机本体通信连接;
8.根据权利要求7所述的无人机,其特征在于,还包括:所述无人机本体对应的遥控端,所述遥控端配置有显示模块,所述声成像组件与所述遥控端通信连接;
9.根据权利要求7所述的无人机,其特征在于,还包括:所述无人机本体对应的遥控端,所述遥控端配置有显示模块,所述声成像组件与所述遥控端通信连接;
10.一种非暂态计算机可读存储介质,其上存储有计算机程序,其特征在于,所述计算机程序被处理器执行时实现如权利要求1-5中任一项所述的无人机巡检方法。
技术总结
本发明涉及无人机技术领域,提供一种无人机巡检方法、装置、无人机、电子设备及存储介质,该方法首先在若接收到搭载在无人机上的声成像组件发送的异常检测信号之后,暂停自主巡航,并基于异常检测信号计算异常检测位置;然后绕异常检测位置飞行,控制声成像组件拍摄异常检测位置的多角度检测图像;最后返回至暂停自主巡航的位置,并继续自主巡航。该无人机巡检方法可以通过无人机是否接收到异常检测信号实现对巡航状态的智能切换,并在智能切换后可以拍摄得到异常检测位置的多角度检测图像,可以为专业巡检人员提供充足的异常检测位置的图像信息,使专业巡检人员不通过复检即可得到充足的信息,可以大大降低专业巡检人员的工作量。
技术研发人员:马旭,李俊,宫韬,车骋,徐甲甲
受保护的技术使用者:浙江讯飞智能科技有限公司
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!