一种结合预防性维护不相关并行机的智能调度方法
本发明涉及生产调度,即涉及系统智能优化、生产规划调度等对智能优化算法有需求的领域,具体涉及一种结合预防性维护不相关并行机的智能调度方法。
背景技术:
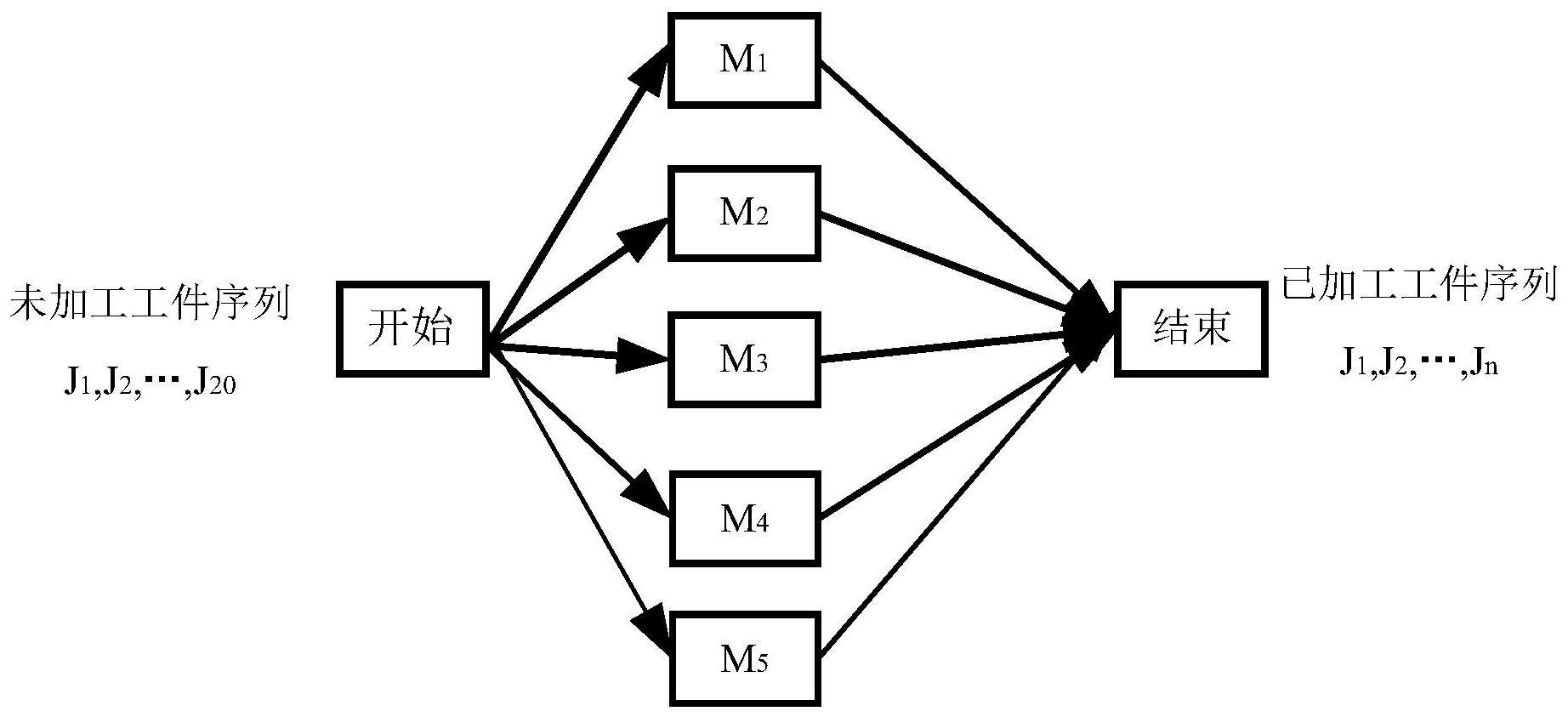
1、生产调度是智能制造中的重要环节,是制造型企业调整资源配置、降本提效的关键所在。不相关并行机调度问题突破对制造资源的限制,工件可由资源集合中的任一机器加工,更贴合实际制造过程,不仅在多处理器任务调度、设备调度、交通运输等领域均有广泛应用,也大量存在于半导体晶圆制造、汽车装配流水线等实体制造业中。不相关并行机中的工件加工时间取决于工件与机器间的匹配度:同一工件在不同机器上的加工时间互不相关。故是并行机调度问题中求解难度较大的一类,已被证明为np-hard问题。在生产调度过程中合理安排预防性维护活动能够有效降低设备的故障率,在消除计划外停机的基础上有利于对生产进程的把控。但在预防性维护的不相关并行机调度问题中,同一工件在不同机器上的加工时间各异,致使各机器在对同一工件进行加工时的役龄退化量不同。此时如若盲目对全部机器采取定周期维护不仅降低机器利用率与生产系统效率,也会造成维修资源浪费等问题。因此,统筹安排预防性维护与不相关并行机调度之间的关系在提升生产系统弹性、企业降本增效等方面具有积极意义。
2、目前对不相关并行机与预防性维护相结合的问题研究主要聚焦与在优化目标与算法层面。相较于传统的定周期维护,基于役龄的机器维护能够有效减少机器的过维护、欠维护的现象发生,在使机器在生产过程中平稳运行的同时保障生产效率,减少企业因维修所带来的经济消耗,缩短全流程制造周期并提升企业的市场竞争力。另外对于不相关并行机这种np-hard问题而言,涉及到的约束庞杂,解空间分布较为离散,利用以分支定价算法为代表的精确算法进行求解时难度较高,设计成本巨大。因此,设计一种能够对其进行高效求解的智能优化算法并取得能够接受的近优解是该领域研究价值较高的问题。
技术实现思路
1、发明目的:
2、本发明目的是针对背景技术中存在的问题,为解决经典粒子无法在离散解空间寻优的问题,以带预防性维护的不相关并行机调度为应用背景提出一种混合离散粒子群算法。
3、技术方案:
4、本发明提出一种结合预防性维护不相关并行机的智能调度方法,步骤为:
5、步骤1:获取调度工件与机器参数信息:包括:工件个数n、机器台数m、各工件在各机器上的加工时长pij、机器可靠性函数中的形状参数α与尺寸参数β、维护时间持续长度;
6、步骤2:利用步骤1获取的参数信息,建立以最小化最大完工时间为优化目标的结合预防性维护的不相关并行机调度集成模型;
7、步骤3:离散粒子群算法结合多邻域搜索算法求解步骤2中结合预防性维护的不相关并行机调度集成模型,通过位置更新模型对离散粒子群算法中的粒子位置进行更新,得到局部最优粒子个体与全局最优粒子个体;
8、步骤4:通过粒子个体更新方法对步骤3中的局部最优粒子个体与全局最优粒子个体进行更新;
9、步骤5:当步骤3中每个粒子位置得到更新后,对步骤4中更新后的粒子个体进行多邻域搜索操作,得到的最终解p″’g;
10、步骤6:判断当前迭代次数e是否达到预设粒子群最大迭代次数gpso_max,若是,则将经过步骤5操作后得到的最终解p″’g作为算法的最优解输出,并终止整个算法;否则返回至步骤3继续执行种群优化操作。
11、进一步的,步骤1中参数信息包括:工件个数n、机器台数m、各工件在各机器上的加工时长pij、机器可靠性函数中的形状参数α与尺寸参数β、维护时间持续长度;
12、进一步的,步骤2中不相关并行机调度集成模型的建立方法为:
13、步骤2.1:使用二参数的weibull分布函数ρj(u)来对机器mj的故障规律进行建模;
14、步骤2.2:依据weibull函数的自身性质,得到机器mj的可靠性函数rj(u);
15、步骤2.3:依据可靠性理论,得到机器mj的临界可靠性阈值δj(u);按照非齐次泊松分布相关性质,求得mj上的累积故障次数hj(u);
16、步骤2.4:通过工件与机器间的合理分配来最小化最大完工时间cmax得到不相关并行机调度集成模型,并确定维护操作的执行时刻保证机器在工件加工过程中的持续可用性;不相关并行机调度集成模型为:
17、mincmax=max(cij)
18、其中,每台机器的完工时间cij等于机器mj上累积故障次数与维护时间乘积hj(u)×dpm与在机器mj上进行加工的工件时长之和。
19、进一步的,步骤2中不相关并行机调度集成模型的约束条件为:
20、
21、
22、
23、
24、
25、
26、
27、式中,i为工件索引值,取值范围为i=1,2,...,n;j为机器索引值,j=1,2,..·,m;k为机器pm次数索引值,k=1,2,..,n;cij为工件i在机器j上的最大完成时间;k是一个极大正数;为工件i在机器j上的起始加工时间;pij为工件i在机器j上的加工持续时间;djk为机器j上进行第k次pm操作的持续时间;tf为机器失效的惩罚时间;hj为机器x的累积故障次数;ufj,ubj分别为机器j上加工工件时的初始役龄与结束此工件加工后的终端役龄;α,β分别为故障率函数的形状参数与尺寸参数;δj为机器j的临界可靠性阈值;xij为工件加工的决策变量,若工件i选择在机器j上进行加工,则xij=1,否则xij=0;yj为机器维修的决策变量,若对机器j执行pm操作,则yj=1,否则yj=0。
28、进一步的,步骤3中离散粒子群算法步骤为:
29、步骤3.1:初始化参数;
30、步骤3.2:使用双编码串对解进行表征,初始化种群,种群中的每个粒子都由工件分配编码串jv与机器分配编码串mv构成;
31、步骤3.3:计算各个粒子个体的目标函数值与适应度值;
32、步骤3.4:将步骤3.3中经由初始化的粒子个体所对应的适应度函数值设置为粒子的个体极值,使用表示;将具有最小化cmax值的个体设置为全局极值,使用表示,将与存储至精英解集ω中;
33、步骤3.5:通过离散粒子群算法执行全局搜索操作,通过位置更新模型对粒子的位置进行更新。
34、进一步的,步骤3.5中位置更新模型为:
35、
36、上式中,表示粒子第e+1代的位置,e取值范围为[1,gpso_max],ω、c1、c2分别为惯性权重因子、粒子个体学习因子与粒子全局学习因子,ω、c1、c2∈[0,1],f1、f2、f3为三种离散寻优算子。
37、进一步的,位置更新模型的推算过程如下:
38、step1:通过粒子自身的信息流动机制更新粒子个体在解空间中的位置;
39、
40、式(10)中,代表粒子自身的信息流动机制,其中:r为(0,1)之间的随机数;
41、step2:通过粒子的个体经验认知过程更新最优粒子个体;
42、
43、式(11)中,表示粒子的个体经验认知过程,操作实现方法为在粒子种群popsize中随机选取粒子p1与当前个体最优粒子分别设p1与的工件分配编码串为jv1、jv2,机器分配编码串为mv1、mv2;
44、step3:通过粒子的全局最优信息共享过程更新全局最优粒子个体;
45、
46、式(13)中,表示粒子的全局最优信息共享过程,依据全局最优粒子位置进行调整操作。
47、进一步的,步骤4中粒子个体更新方法为:在当前的迭代过程中,对粒子执行完全局搜索策略后,依据设置的目标函数,选出当前粒子种群中具有最大适应度粒子个体与第e-1次迭代过程中的全局最优粒子个体进行比较,如若则将当前的全局最优粒子个体与局部最优粒子个体同时存入精英解集ω中;如若则将当前的全局最优粒子的值赋给局部最优粒子个体同时清空当前精英解集ω,将新的最优粒子存入ω,完成当前迭代过程的与的更新,并保证精英解集ω中存放的粒子是全局最优粒子。
48、进一步的,步骤5中多邻域搜索操作的步骤为:
49、①、初始化邻域搜索策略参数:设置最大邻域搜索深度gns_max;
50、②、取粒子种群popsize中任一粒子pg,将pg按照ns1搜索策略进行邻域搜索进而得到改进解p′g,并将改进解p′g计为当前最优解p″g;
51、③、计算解p″g对应的目标函数值,并使用最大完工时间最小作为目标函数值来对p″g与pg的值进行比较,若p″g的cmax值比pg小,则表明通过邻域搜索ns1操作后解质量得到改善,将精英集ω使用p″g替换,邻域搜索深度加一;否则将经过ns1操作后得到的p″g作为ns2的输入解,邻域搜索深度加一;
52、④、判断是否满足最大邻域搜索深度gns_max,若满足,停止搜索,输出当前最优解;若不满足,继续进行ns2搜索操作;
53、⑤、将步骤③中得到的解p″g按照ns2操作进行邻域搜索,设经过ns2操作后得到的解为p″’g,并将p″′g与输入解p″g进行比较,若cmax值有所减少,将将步骤③中的精英集ω使用p″’g替换,邻域搜索深度加一;
54、⑥、判断是否满足终止条件,若达到最大邻域搜索深度gns_max,则输出最终解p″’g,否则,跳转至步骤②。
55、进一步的,所述ns1操作为:两两互换所有工件的加工机器,若每次交换后两工件的pij之和减少且机器m的cmax相较于互换之前不增加,则确认执行ns1操作;
56、所述ns2操作为:设当前具有最大完工时间的机器为关键机器,随机选择关键机器中的任一工件将其插入至当前具有最小完工时间的机器中,选取当前调度集合中的mincmax与maxcmax机器,将maxcmax机器上的工件顺序移至mincmax机器上进行加工,若能减少当前调度方案的cmax,则接受ns2操作,输出最终优化调度方案。
57、有益效果:
58、与现有技术相比,本发明具有如下有益技术效果:
59、1、本发明对经典粒子群算法中位置与速度更新公式进行了重新定义,使用由三种离散寻优算子构成的全局搜索机制实现粒子在离散解空间中的更新。该全局搜索机制能够使粒子自由到达解空间中的任一点,提升算法的搜索效率与求解质量。
60、2、本发明使用混合离散粒子群优化算法,结合邻域搜索算法在局部搜索过程中的优势提升算法的收敛性。在解决以预防性维护不相关并行机调度为背景的问题时,可以在较短时间内获得令人满意的调度方案,相较于定周期维护能够有效减少机器维修频率,在保障生产效率的同时达到降本增效的目的。
61、3、本发明在优化目标设计方面,结合现代制造装配业特征,以最小化最大完工时间为优化目标,更贴近实际生产情况,在保障机器的可靠性的同时保证生产的平稳性与效率性。
62、4、本发明所提出的混合离散粒子群优化算法处了可以应用在不相关并行机调度上,也可以将作业车间、柔性制造车间作为调度背景,具有很好的应用鲁棒性。
- 还没有人留言评论。精彩留言会获得点赞!