一种基于数字孪生的智能加工单元多策略组合仿真方法
本发明涉及加工单元生产策略仿真优化,具体地,涉及一种基于数字孪生的智能加工单元多策略组合仿真方法。
背景技术:
1、随着大数据、移动技术、物联网等新一代信息技术在制造业的广泛应用,世界各国争先提出智能制造发展战略,加速国家制造业智能化转型。在此背景下,智能加工单元在智能制造领域中被广泛应用。
2、在单元生产加工过程中,工作人员需要全面了解单元整体的运行情况,获得生产过程统计数据及性能分析,及时根据单元状态调整生产策略,进而提高单元整体的运行效率。由此,生产现场的dashboard(监控大屏幕)技术应运而生,其优点是提供了丰富的数据与图表,方便工作人员及时了解单元设备运行状况以及当前执行任务等信息。
3、但面对于未来加工单元能否按时完成任务?设备出现故障时生产计划应如何调整?单元物流系统能否改进优化等问题,dashborad由于不具备分析预测功能,难以解决上述问题。即便嵌入了一些预测分析模型,但由于分析模型的不可变性,无法实现对现有生产过程下的策略优化与改进分析。仿真技术可以提供根据实际需求而构建的虚拟模型,并可以按照相应的策略逻辑进行仿真分析。但传统仿真的初始输入由人工配置,且只能获得特定条件下的仿真结果,仿真环境存在失真,得到的仿真结果具有滞后性。因此,如何提高仿真结果的可靠性与可信度以及减少仿真环境失真,是当前亟需解决的问题。
技术实现思路
1、针对现有技术中存在的问题,本发明提供了一种基于数字孪生的智能加工单元多策略组合仿真方法,通过构建加工单元数字孪生模型,并采集智能加工单元实时运行数据驱动孪生模型,从而实现虚实单元同步,得到高保真的仿真环境。在此环境中,可基于单元实际工况实现不同策略组合下的单元仿真预测,进而分析优化单元生产过程,弥补了传统单元仿真下的仿真结果“失真”与仿真策略固化单一的缺点,促进了单元生产效率的提升。
2、为实现上述目的,本发明提供的技术方案是:一种基于数字孪生的智能加工单元多策略组合仿真方法,具体包括如下步骤:
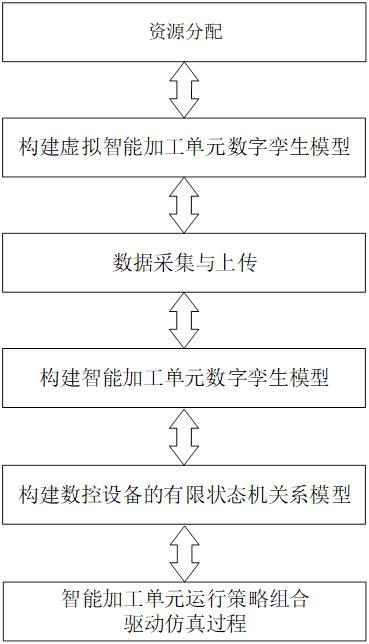
3、步骤1、将智能加工单元物理空间内的资源对象分成软件资源、感知资源、数控设备、辅助资源、网络资源和工艺过程;
4、步骤2、将感知资源、数控设备、辅助资源分别从几何、物理、行为、规则维度出发,构建多维度的虚拟加工单元数字孪生模型;
5、步骤3、根据智能加工单元的现场设备通讯情况,进行智能加工单元物理空间内的运行数据采集,并上传至多维度的虚拟加工单元数字孪生模型中;
6、步骤4、将步骤1中资源对象的多源异构数据进行分类建模,形成孪生数据层,利用jsoncode事件虚实映射方法解析孪生数据层中的孪生数据,驱动多维度的虚拟加工单元数字孪生模型虚实同步,建立智能加工单元数字孪生模型;
7、步骤5、在智能加工单元数字孪生模型的基础上,建立数控设备的有限状态机关系模型,实现在虚拟仿真情况下模型状态的自主转换;
8、步骤6、将智能加工单元的生产流程分解成单对象,针对不同的单对象设计相应的运行策略,将单对象的运行策略进行组合,得到智能加工单元运行策略组合,驱动仿真过程。
9、进一步地,步骤3中多维度的虚拟加工单元数字孪生模型通过基于http协议定期访问智能加工单元物理空间中数据库的api,获取非实时运行数据,通过订阅mqtt主题获取采集的实时运行数据,再通过socket上传至多维度的虚拟加工单元数字孪生模型。
10、进一步地,所述运行数据的采集采用的协议包括:nc-link协议、ethercat协议、mqtt协议和socket协议。
11、进一步地,步骤4包括如下子步骤:
12、步骤4.1、将步骤1中资源对象的多源异构数据进行分类建模,形成孪生数据层,将具有动作行为的资源对象进行逻辑解耦,建立相应的状态队列和目的地队列;
13、步骤4.2、智能加工单元物理空间向智能加工单元数字孪生模型空间发送jsoncode事件,智能加工单元数字孪生模型空间接收jsoncode事件信息,解析出孪生数据的执行对象、事件的状态、对象目的位置与状态,将其存放入对应的状态队列和目的地队列中,资源对象读取队列并完成相应的动作与状态的更迭。
14、进一步地,步骤5中数控设备的有限状态机关系模型由数控设备的加工状态、触发事件和响应动作组成;所述数控设备的加工状态包括:空闲等待状态 q1、正常加工状态 q2、完成加工状态 q3和阻塞等待状态 q4;所述触发事件包括:数控设备初始化 e1、待加工物料送达指定设备 e2、数控设备开始加工物料 e3、数控设备完成物料加工 e4取出已完成加工的物料 e5、当前无法取出已完成加工的物料 e6;所述响应动作包括:数控设备信息初始化 b1、运送加工所需物料至指定位置 b2、设备完成加工任务,等待取出物料 b3、取出设备内已完成加工的物料 b4、开始加工任务,对物料进行加工 b5。
15、进一步地,步骤5中数控设备的有限状态机关系模型的工作过程为:
16、(1)当仿真开始进行数控设备初始化 e 1时,数控设备信息进行初始化 b 1,并进入空闲等待状态 q 1;
17、(2)当待加工物料送达指定设备 e 2、数控设备开始加工物料 e 3时,运输设备运送加工所需物料至指定位置 b 2,数控设备进入正常加工状态 q 2,对物料进行加工 b 5;
18、(3)当数控设备完成物料加工 e 4时,数控设备结束加工任务,等待取出物料 b 3,进入完成加工状态 q 3,若此时能够取出已完成加工的物料 e 5,则将数控设备内已完成加工的物料取出 b 4,数控设备返回空闲等待状态 q 1,等待下一次加工;若当前无法取出设备内已完成加工的物料 e 6,则数控设备进入阻塞等待状态q4,直至能取出设备内加工完成的物料 e 4,运输设备会将已完成加工的物料取出 b 4,数控设备进入空闲等待状态 q 1。
19、进一步地,步骤6中单对象包括:工人上下料流程、agv转运物料流程、机床加工物料流程,所述工人上下料流程中的运行策略包括:单元工人在线策略⑧和单元无人值守策略⑨;所述agv转运物料流程的运行策略包括:托盘存放位置锁定策略①、托盘顺序存放策略②、托盘就近存放策略③、以最短路径为目标的agv任务优化策略⑩和agv任务不可变动策略⑪;所述机床加工物料流程的运行策略包括:五轴机床可用于四轴机床加工零件策略④、五轴机床不可用于四轴机床加工零件策略⑤、同类型机床可替换策略⑥、同类型机床不可替换策略⑦。
20、进一步地,所述单对象的运行策略进行组合的规则为:
21、a、工人上下料流程、agv转运物料流程、机床加工物料流程之间的运行策略自由组合;
22、b、工人上下料流程中的运行策略⑧和⑨互斥;
23、c、agv转运物料流程的运行策略①、②、③与运行策略⑩、⑪之间自由组合,运行策略①、②、③之间互斥,运行策略⑩、⑪之间互斥;
24、d、机床加工物料流程的运行策略④、⑤与运行策略⑥、⑦之间自由组合,策略④、⑤之间互斥,策略⑥、⑦之间互斥。
25、与现有技术相比,本发明的有益效果是:
26、1.本发明通过智能加工单元数字孪生模型可采集得到的不同加工时刻、不同工艺状态下的单元运行状态,建立高保真的单元虚拟仿真初始环境,使得智能加工单元虚拟仿真优化更加可靠科学,适用于现代化智能加工单元;
27、2.本发明将智能加工单元的生产流程分解成单对象,针对不同的单对象设计相应的运行策略,将单对象的运行策略进行组合,得到智能加工单元运行策略组,驱动仿真过程,提高智能加工单元仿真优化的科学性,便于实现单元仿真优化;
28、本发明基于数字孪生的智能加工单元多策略组合仿真方法提供高保真的仿真初始环境以及可以在多种策略组合下进行智能加工单元仿真优化的方法,可以提高仿真结果的可靠性与可信度。
- 还没有人留言评论。精彩留言会获得点赞!