一种运载火箭伺服机构卡死故障诊断方法和系统与流程
本发明属于运载火箭姿态控制系统,具体涉及一种运载火箭伺服机构卡死故障诊断方法和系统。
背景技术:
1、伺服机构为运载火箭姿控系统的执行机构,控制系统通过伺服机构的伸缩牵动发动机喷管的摆动,从而实现火箭飞行时俯仰、偏航、滚动姿态角的控制。伺服机构相关故障一旦发生,其后果将是致命性的,轻则形成较大姿态偏差,偏离预定轨道,重则导致姿态失稳。因此对伺服故障的故障诊断显得尤为重要,如果能准确诊断出伺服故障并采取补救措施,则有可能会阻止火箭的失败。
2、伺服机构卡死故障为运载火箭液压伺服机构的主要故障模式。现有技术对卡死故障发生后控制指令重分配研究的较多,有伪逆法、线性规划法、不动点法等,对于卡死故障的诊断与检测研究的方法相对较少。有学者提出一种基于参考模型的伺服系统在轨故障诊断处理系统及方法,该方法诊断的故障类型较多,但诊断需要的时间较长效率较低;还有学者提出利用扩展多模型自适应估计故障的方法,但该方法需要建立各种故障模型,对未知故障的处理能力一般。
技术实现思路
1、本发明的目的在于克服上述缺陷,提供一种运载火箭伺服机构卡死故障诊断方法和系统,本发明解决了伺服机构卡死故障难以诊断以及诊断效率低,进而导致控制失效的技术问题。本发明能够实现快速诊断伺服机构卡死故障,进一步实现了摆角重构,达到故障条件下运载火箭稳定控制、可靠性高的效果。
2、为实现上述发明目的,本发明提供如下技术方案:
3、一种运载火箭伺服机构卡死故障诊断方法,包括:
4、根据摆角信息计算摆角偏差;摆角信息包括伺服参考模型输出和伺服机构摆角反馈;
5、根据摆角偏差确定伺服摆角伸缩标志;
6、根据伺服摆角伸缩标志判断伺服机构摆角是否异常;
7、如果伺服机构摆角正常,则认为伺服机构未发生卡死故障;
8、如果伺服机构摆角异常,则进一步判断箭体姿态角偏差是否异常;
9、如果箭体姿态角偏差正常,则认为伺服机构未发生卡死故障;
10、如果箭体姿态角偏差异常,则认为伺服机构发生卡死故障。
11、进一步的,伺服参考模型输出为伺服参考模型接收摆角指令后输出的值;伺服参考模型为伺服特性模拟传递函数;
12、伺服机构摆角反馈为伺服机构接收摆角指令后的实际输出值,为传感器测量值。
13、进一步的,摆角偏差=伺服参考模型输出-摆角反馈。
14、进一步的,根据摆角偏差确定伺服摆角伸缩标志的方法包括:
15、将摆角偏差与伺服工作门限m1相比较;
16、当摆角偏差>m1,令伺服摆角伸缩标志为1;
17、当摆角偏差<-m1,令伺服摆角伸缩标志为-1;
18、当-m1≤摆角偏差≤m1,令伺服摆角伸缩标志为0。
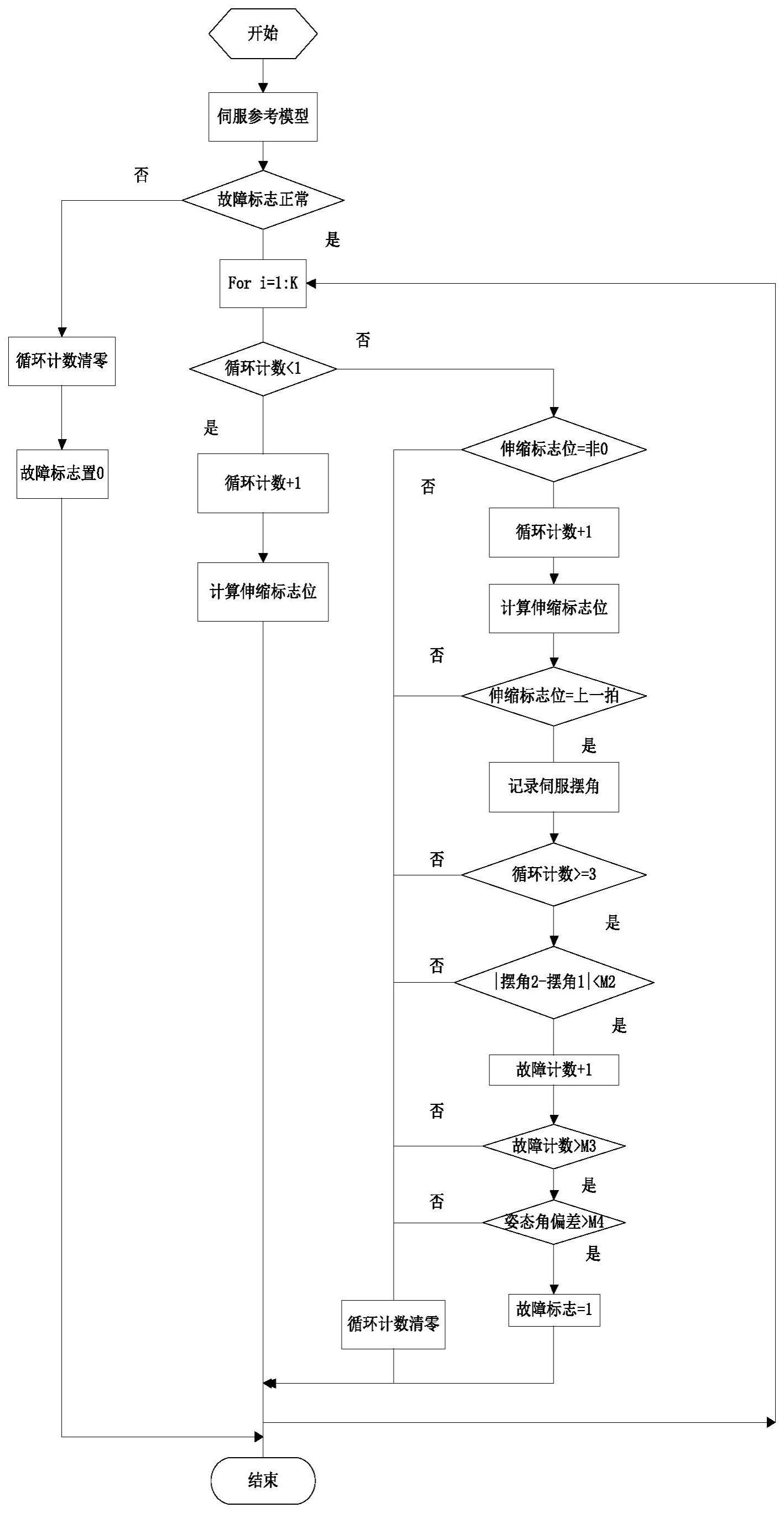
19、进一步的,根据伺服摆角伸缩标志判断伺服机构摆角是否异常的方法包括:
20、s1在当前拍,判断伺服摆角伸缩标志是否为0;如果伺服摆角伸缩标志为0,则认为当前拍伺服机构摆角正常,在下一拍重新返回步骤s1;如果伺服摆角伸缩标志不为0,则进入步骤s2;
21、s2判断当前拍的伺服摆角伸缩标志与当前拍之前的连续n拍的伺服摆角伸缩标志是否均相同,如果相同则进入步骤s3,如果不同则认为当前拍伺服机构摆角正常,在下一拍重新返回步骤s1;
22、s3判断当前拍与当前拍之前的连续n拍的伺服机构摆角反馈是否均相同;如果当前拍与当前拍之前的连续n拍的伺服机构摆角反馈均相同,则认为当前拍伺服机构摆角异常;如果当前拍与当前拍之前的连续n拍的伺服机构摆角反馈不全相同,则认为当前拍伺服机构摆角正常,在下一拍重新返回步骤s1;
23、n为≥2的整数。
24、进一步的,步骤s3中,判断当前拍与当前拍之前的连续n拍的伺服机构摆角反馈是否均相同的方法包括:
25、将当前拍的伺服机构摆角反馈与当前拍之前的连续n拍的伺服机构摆角反馈分别作差,判断所得各差值是否均小于设定门限m2,当均小于设定门限m2,认为当前拍与当前拍之前的连续n拍的伺服机构摆角反馈均相同,否则认为当前拍与当前拍之前的连续n拍的伺服机构摆角反馈不全相同。
26、进一步的,根据伺服摆角伸缩标志判断伺服机构摆角是否异常的方法还包括:
27、步骤s3中,认为当前拍伺服机构摆角异常时,故障计数加1,并判断故障计数是否超过设定门限m3,当故障计数超过设定门限m3时,进一步判断当前拍箭体姿态角偏差是否异常,当故障计数未超过设定门限m3时,在下一拍重新返回步骤s1;
28、当认为当前拍伺服机构摆角正常时,故障计数清零。
29、进一步的,进一步判断箭体姿态角偏差是否异常的方法包括:
30、判断当前拍箭体姿态角偏差是否超过设定门限m4,当超过设定门限m4则认为伺服机构发生卡死故障,置该伺服机构故障标志kerr_sfi为1,当未超过设定门限m4则认为该伺服机构未发生卡死故障。
31、进一步的,运载火箭伺服机构卡死故障诊断方法还包括:
32、对各伺服机构进行实时卡死故障诊断,当存在一台伺服机构发生卡死故障时,进行摆角重构,根据伺服机构故障标志kerr_sfi采用伪逆法重新计算摆角指令,当存在大于一台伺服机构发生卡死故障时,不再进行摆角重构。
33、一种运载火箭伺服机构卡死故障诊断系统,用于实现上述一种运载火箭伺服机构卡死故障诊断方法,包括三通道姿控计算模块、摆角分配模块、故障诊断模块、伺服机构、惯组和速率陀螺测量模块;故障诊断模块包括伺服参考模型和诊断模块;
34、三通道姿控计算模块根据姿态信息得到三通道控制信号,将三通道控制信号输出至摆角分配模块;
35、摆角分配模块根据三通道控制信号分配得到各伺服摆角指令,将摆角指令输出至伺服机构和故障诊断模块中的伺服参考模型;
36、伺服机构跟随摆角指令进行摆动,传感器采集伺服摆角并反馈至诊断模块,该伺服摆角即为伺服机构摆角反馈;惯组和速率陀螺测量模块采集姿态信息,将姿态信息输出至三通道姿控计算模块;
37、伺服参考模型根据摆角指令向诊断模块输出的信息即伺服参考模型输出;
38、诊断模块根据伺服参考模型输出和伺服机构摆角反馈计算摆角偏差;根据摆角偏差确定伺服摆角伸缩标志;根据伺服摆角伸缩标志判断伺服机构摆角反馈是否异常,如果伺服机构摆角反馈正常,则认为伺服机构未发生卡死故障,如果伺服机构摆角反馈异常,则进一步判断箭体姿态角偏差是否异常,如果箭体姿态角偏差正常,则认为伺服机构未发生卡死故障,如果箭体姿态角偏差异常,则认为伺服机构发生卡死故障。
39、本发明与现有技术相比具有如下至少一种有益效果:
40、(1)本发明创造性的提出一种运载火箭伺服机构卡死故障诊断方法,利用伸缩标志实现了对伺服机构卡死故障的实时诊断,诊断结构准确可靠;
41、(2)本发明伸缩标志计算过程与伺服工作原理相近,伺服卡死故障诊断增加伺服伸缩标志计算和摆角动作判断过程,有效减少误判率;
42、(3)本发明设计连续多拍的判断形式,进一步提高了诊断结果的可靠性;
43、(4)本发明在摆角异常的基础上,增加了箭体姿态角异常的判断,能够有效防止误判;
44、(5)由于故障模式针对性强,诊断时间较少,利用本发明方法可以及早进行故障重构,减小伺服故障给系统带来的姿态偏差甚至阻止姿态发散。
- 还没有人留言评论。精彩留言会获得点赞!