一种无人车运行路径规划方法、装置及设备
本技术涉及无人车,尤其涉及一种无人车运行路径规划方法、装置及设备。
背景技术:
1、物流无人车在货物搬运、巡航安检等服务业邻域得到了广泛的应用,利用无人车进行救援、补给、探索等任务一直是研究的热点,基于无人车组成无人车集群,通过通信系统配合协同,可充分发挥无人车的优势以满足复杂多样的任务需求。但这也对无人车的单体控制提出了更高的要求,在多无人车集群在协同执行任务的过程中某台无人车的碰撞可能会导致无人车集群工作系统的瘫痪,所以单体无人车的安全行使是整个无人车集群完成工作的重要前提。
2、在其中,无人车的可行安全空间的构建是研究的重点。为了构建无人车的安全行使空间,通常做法是获取周围环境的点云分布,并在此基础上构建行驶区域周围的环境的地图,后在生成的地图中采用路径搜索算法,通过对搜索到的路径进行膨胀就可以得到安全可行的空间。但在实际的运行中,由点云信息生成地图的过程会耗费大量的算力,倘若减少迭代的时间会极大地降低地图的精度,由此算得的安全区域可靠性不高;单无人车计算资源的浪费会导致无人车集群效率的急剧下降;此外,对未知环境的安全路径生成不适用,且搜索效率较差。
技术实现思路
1、本技术提供了一种无人车运行路径规划方法、装置及设备,用于解决现有技术点云地图生成过程计算量太大,且不适用于未知环境,导致实际的无人车集群路径规划效率很差的技术问题。
2、有鉴于此,本技术第一方面提供了一种无人车运行路径规划方法,包括:
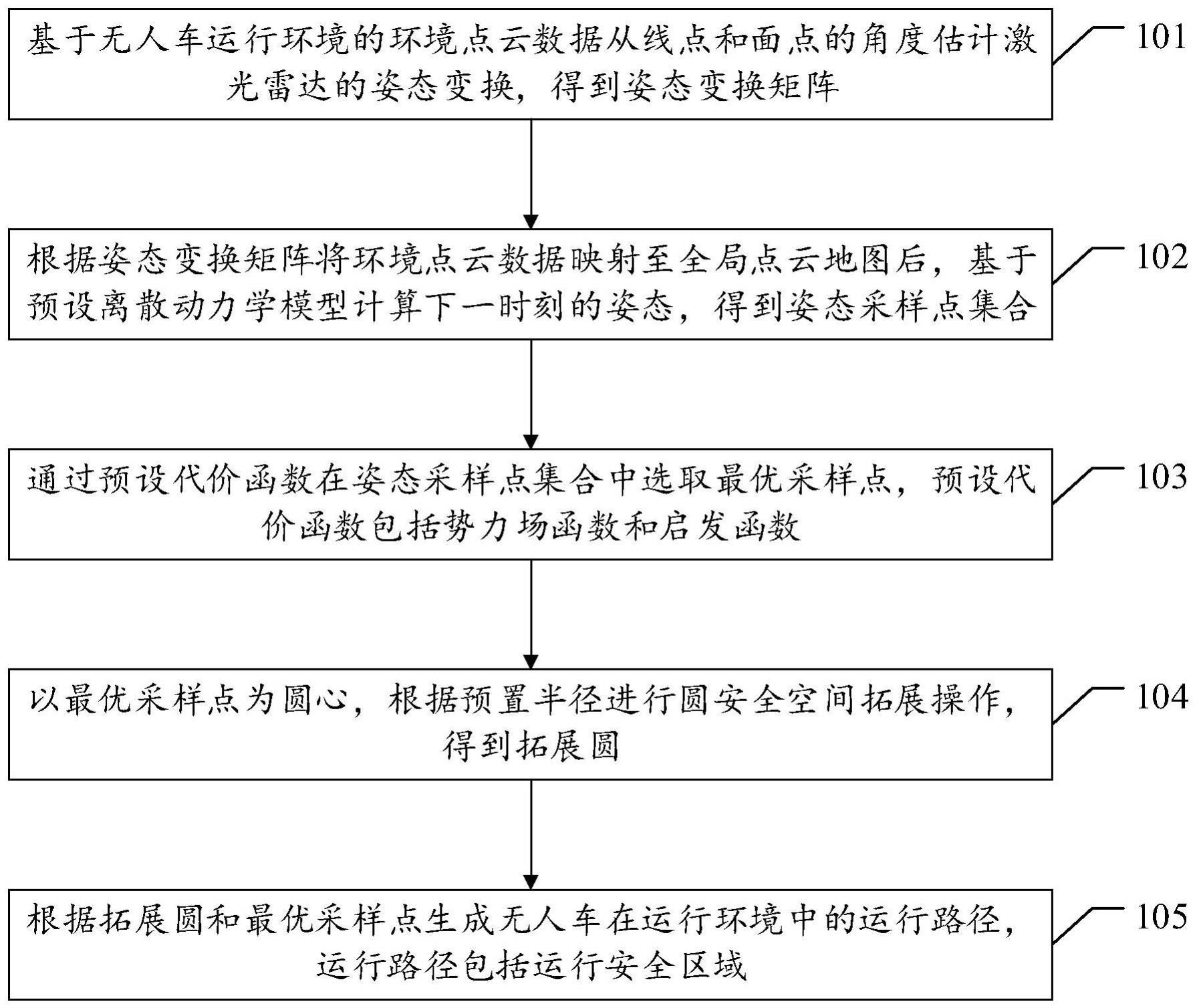
3、基于无人车运行环境的环境点云数据从线点和面点的角度估计激光雷达的姿态变换,得到姿态变换矩阵;
4、根据所述姿态变换矩阵将所述环境点云数据映射至全局点云地图后,基于预设离散动力学模型计算下一时刻的姿态,得到姿态采样点集合;
5、通过预设代价函数在所述姿态采样点集合中选取最优采样点,所述预设代价函数包括势力场函数和启发函数;
6、以所述最优采样点为圆心,根据预置半径进行圆安全空间拓展操作,得到拓展圆;
7、根据所述拓展圆和所述最优采样点生成无人车在运行环境中的运行路径,所述运行路径包括运行安全区域。
8、优选地,所述基于无人车运行环境的环境点云数据从线点和面点的角度估计激光雷达的姿态变换,得到姿态变换矩阵,包括:
9、通过预设特征提取函数在无人车运行环境的环境点云数据中提取线点和面点;
10、基于不同时刻的两组所述线点和面点计算激光雷达的相对姿态变换,所述相对姿态变换包括相对变换线点和相对变换面点;
11、根据所述相对变换线点和相对变换面点构建非线性函数,并求解出激光雷达的姿态变换矩阵。
12、优选地,所述基于无人车运行环境的环境点云数据从线点和面点的角度估计激光雷达的姿态变换,得到姿态变换矩阵,之前还包括:
13、通过激光雷达获取无人车运行环境的点云信息,得到环境点云数据。
14、优选地,所述通过预设代价函数在所述姿态采样点集合中选取最优采样点,所述预设代价函数包括势力场函数和启发函数,包括:
15、基于所述姿态采样点集合中采样点产生的势力场构建势力场函数;
16、根据所述势力场函数和启发函数构建采样点的代价函数,得到预设代价函数;
17、以所述预设函数求解最小值为依据,在所述姿态采样点集合中选取最优采样点。
18、优选地,所述以所述最优采样点为圆心,根据预置半径进行圆安全空间拓展操作,得到拓展圆,之前还包括:
19、采用kd-tree算法搜索所述最优采样点的近邻点,确定最邻近采样点;
20、根据所述最优采样点与所述最邻近采样点计算预置半径。
21、本技术第二方面提供了一种无人车运行路径规划装置,包括:
22、姿态估计单元,用于基于无人车运行环境的环境点云数据从线点和面点的角度估计激光雷达的姿态变换,得到姿态变换矩阵;
23、姿态采集单元,用于根据所述姿态变换矩阵将所述环境点云数据映射至全局点云地图后,基于预设离散动力学模型计算下一时刻的姿态,得到姿态采样点集合;
24、最优选取单元,用于通过预设代价函数在所述姿态采样点集合中选取最优采样点,所述预设代价函数包括势力场函数和启发函数;
25、空间拓展单元,用于以所述最优采样点为圆心,根据预置半径进行圆安全空间拓展操作,得到拓展圆;
26、路径规划单元,用于根据所述拓展圆和所述最优采样点生成无人车在运行环境中的运行路径,所述运行路径包括运行安全区域。
27、优选地,所述姿态估计单元,包括:
28、特征提取子单元,用于通过预设特征提取函数在无人车运行环境的环境点云数据中提取线点和面点;
29、姿态变换子单元,用于基于不同时刻的两组所述线点和面点计算激光雷达的相对姿态变换,所述相对姿态变换包括相对变换线点和相对变换面点;
30、函数计算子单元,用于根据所述相对变换线点和相对变换面点构建非线性函数,并求解出激光雷达的姿态变换矩阵。
31、优选地,所述最优选取单元,包括:
32、第一函数构建子单元,用于基于所述姿态采样点集合中采样点产生的势力场构建势力场函数;
33、第二函数构建子单元,用于根据所述势力场函数和启发函数构建采样点的代价函数,得到预设代价函数;
34、最优选取计算子单元,用于以所述预设函数求解最小值为依据,在所述姿态采样点集合中选取最优采样点。
35、优选地,还包括:
36、邻近搜索单元,用于采用kd-tree算法搜索所述最优采样点的近邻点,确定最邻近采样点;
37、半径计算单元,用于根据所述最优采样点与所述最邻近采样点计算预置半径。
38、本技术第三方面提供了一种无人车运行路径规划设备,所述设备包括处理器以及存储器;
39、所述存储器用于存储程序代码,并将所述程序代码传输给所述处理器;
40、所述处理器用于根据所述程序代码中的指令执行第一方面所述的无人车运行路径规划方法。
41、从以上技术方案可以看出,本技术实施例具有以下优点:
42、本技术中,提供了一种无人车运行路径规划方法,包括:基于无人车运行环境的环境点云数据从线点和面点的角度估计激光雷达的姿态变换,得到姿态变换矩阵;根据姿态变换矩阵将环境点云数据映射至全局点云地图后,基于预设离散动力学模型计算下一时刻的姿态,得到姿态采样点集合;通过预设代价函数在姿态采样点集合中选取最优采样点,预设代价函数包括势力场函数和启发函数;以最优采样点为圆心,根据预置半径进行圆安全空间拓展操作,得到拓展圆;根据拓展圆和最优采样点生成无人车在运行环境中的运行路径,运行路径包括运行安全区域。
43、本技术提供的无人车运行路径规划方法,基于环境点云数据计算出激光雷达的姿态变换矩阵后,根据姿态变换矩阵将环境点云数据映射到全局点云地图,不需要基于点云数据构建环境地图,能够在一定程度上节省算力。在路径规划过程中,引入无人车离散动力学模型和预设代价函数选取最优采样点,使得基于此生成的拓展圆和运行路径更加准确,对环境的未知与否没有要求,还能保证路径可靠性。因此,本技术能够解决现有技术点云地图生成过程计算量太大,且不适用于未知环境,导致实际的无人车集群路径规划效率很差的技术问题。
- 还没有人留言评论。精彩留言会获得点赞!