机器人运动控制方法、装置、设备及存储介质与流程
本公开涉及机器人控制及金融科技领域,尤其涉及一种机器人运动控制方法、装置、设备、介质和程序产品。
背景技术:
1、越来越多的自动设备被应用于金融服务的过程中,如配置有音视频播放功能的服务型机器人已被广泛应用于银行等金融服务场所的工作场景中,以在指定的服务区域内移动,并在到达预设的服务位置后进行音视频信息的播放,以与客户进行互动进行业务办理或业务展示。
2、目前,对于机器人的运动控制方法一般包括自适应定位导航方式及循轨控制方式。其中,采用自适应定位导航的控制方式需在机器人内配置多种主动检测设备,以在机器人行进过程中进行行进避障等操作,但通过这类控制方式进行控制的机器人往往具有限制条件多,行进速度慢及可靠性较低的不足;而采用循轨控制方式的机器人则适用于在规定的服务区域内进行往复运动,以满足服务需要。
3、但在金融服务场所中,由于机器人所处的服务区域中存在很多的移动人员(如客户及服务人员),因此,机器人的行进路线与移动人员的行进路线难免重叠,为此,机器人会频繁的在停止行进及恢复行进状态进行切换,从而影响对机器人的控制,造成机器人在行进过程发生偏移。为此,如何提高机器人的循轨能力成为亟待解决的问题。
技术实现思路
1、鉴于上述问题,本公开提供了机器人运动控制方法、装置、设备、介质和程序产品。
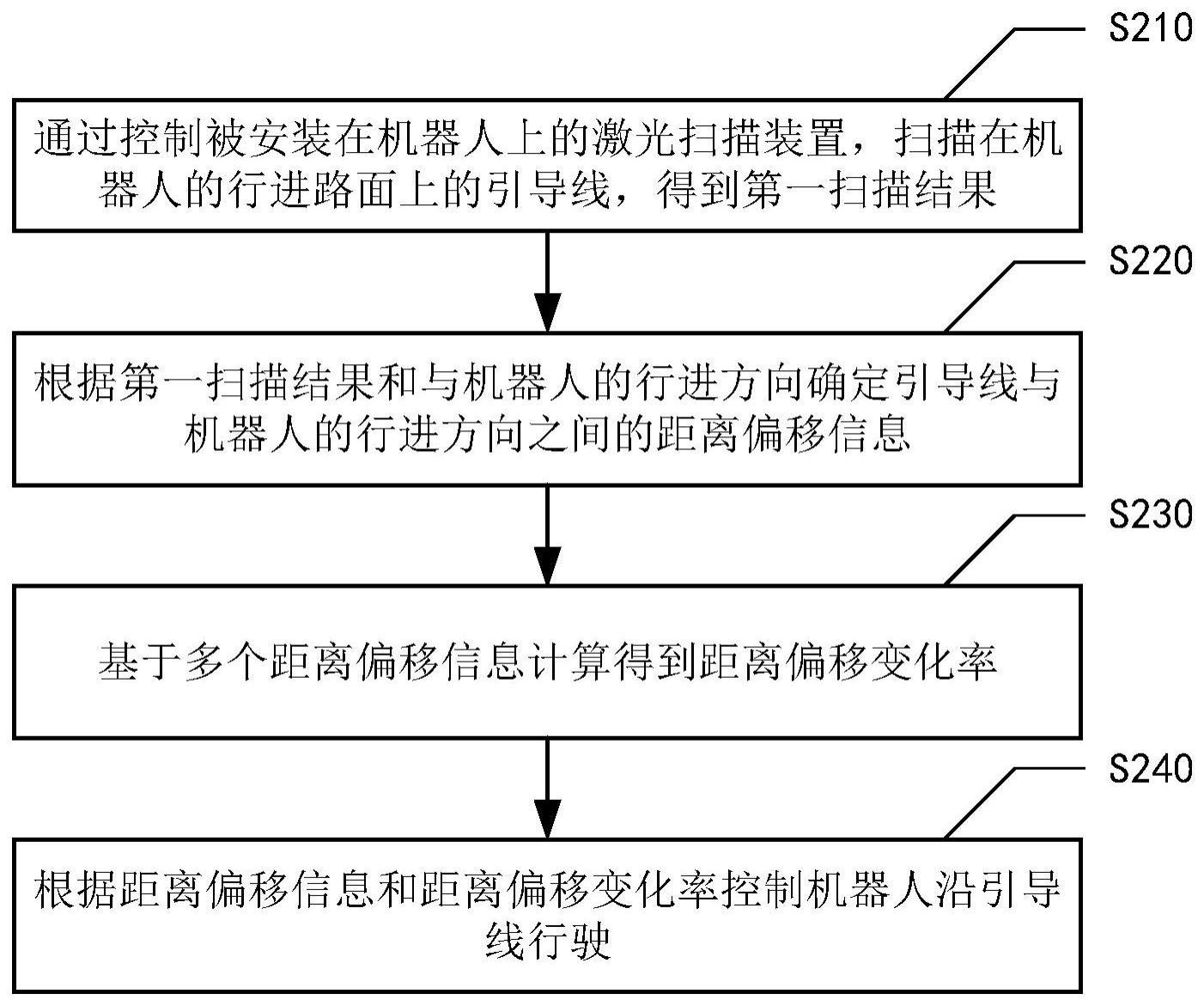
2、根据本公开的第一个方面,提供了一种机器人运动控制方法,包括:通过控制被安装在机器人上的激光扫描装置,扫描在上述机器人的行进路面上的引导线,得到第一扫描结果;根据上述第一扫描结果和与上述机器人的行进方向确定上述引导线与上述机器人的行进方向之间的距离偏移信息;基于多个上述距离偏移信息计算得到距离偏移变化率;以及根据上述距离偏移信息和上述距离偏移变化率控制上述机器人沿上述引导线行驶。
3、根据本公开的实施例,上述通过控制被安装在机器人上的激光扫描装置,扫描在上述机器人的行进路面上的引导线,得到第一扫描结果包括:通过上述激光扫描装置识别上述引导线;以及采集上述引导线的图像信息,用作上述第一扫描结果。
4、根据本公开的实施例,上述根据上述第一扫描结果和与上述机器人的行进方向确定上述引导线与上述机器人的行进方向之间的距离偏移信息包括:将上述第一扫描结果由红绿蓝图像转换为目标图像;提取上述目标图像的颜色特征并进行二值化处理,以获得沿上述引导线的延伸方向延伸的上述机器人的初始行进方向,并控制上述机器人沿上述初始行进方向行驶;在上述机器人行驶的状态下,继续通过上述激光扫描装置扫描在上述机器人的行进路面上的引导线,得到第二扫描结果;以及基于上述第二扫描结果获取上述机器人的实际行进方向,获取上述实际行进方向与上述初始行进方向的位移偏差量作为上述距离偏移信息。
5、根据本公开的实施例,上述基于多个上述距离偏移信息计算得到距离偏移变化率包括:获取相邻的多个预设时间段内的上述距离偏移信息;以及基于相邻的两个上述预设时间段内的上述距离偏移信息的比值计算上述距离偏移变化率。
6、根据本公开的实施例,上述根据上述距离偏移信息和上述距离偏移变化率控制上述机器人沿上述引导线行驶包括:获取上述机器人沿上述初始行进方向行驶的模糊比例、积分及微分控制器的初始控制量,其中上述初始控制量包括控制上述机器人沿上述初始行进方向形式的比例、积分及微分控制器的原始参数;将上述距离偏移信息及上述距离偏移变化率作为模糊输入量,将上述原始参数的比例修正量、积分修正量及微分修正量作为模糊输出量;选择上述模糊输入量及上述模糊输出量的隶属函数;对上述模糊输入量进行模糊化处理,基于上述距离偏移信息及上述距离偏移变化率构建模糊规则控制表,并基于上述模糊规则控制表通过模糊推理,获取上述模糊输出量;对上述模糊输出量进行解模糊,以获取上述比例、积分及微分控制器分别对应的修正量;以及将上述比例、积分及微分控制器分别对应的修正量与上述比例、积分及微分控制器的上述原始参数相加获取目标控制参数,并以上述目标控制参数控制上述机器人行驶。
7、根据本公开的实施例,上述对上述模糊输入量进行模糊化处理,基于上述距离偏移信息及上述距离偏移变化率构建模糊规则控制表,并基于上述模糊规则控制表通过模糊推理,获取上述模糊输出量包括:对上述距离偏移信息及上述距离偏移变化率进行模糊化处理,获取与上述模糊输入量相对应的模糊子集;以及针对上述距离偏移信息及上述距离偏移变化率的模糊子集依据上述模糊规则控制表所设置的控制规则,推理上述比例修正量、上述积分修正量及上述微分修正量的模糊输出量。
8、根据本公开的实施例,上述对上述模糊输出量进行解模糊,以获取上述比例、积分及微分控制器的修正量包括:通过面积平分法将上述比例修正量、上述积分修正量及上述微分修正量的模糊输出量和对应的隶属度代入上述面积平分法公式进行解模糊,以获得上述比例、积分及微分控制器的修正量。
9、根据本公开的实施例,机器人运动控制方法还包括:通过控制上述激光扫描装置,扫描设置于上述引导线的一端的信息码,得到第三扫描结果;以及根据上述第三扫描结果控制上述机器人执行上述信息码中所包含的动作。
10、本公开的第二方面提供了一种机器人运动控制装置,包括:第一控制模块,用于通过控制被安装在机器人上的激光扫描装置,扫描在上述机器人的行进路面上的引导线,得到第一扫描结果;确定模块,用于根据上述第一扫描结果和与上述机器人的行进方向确定上述引导线与上述机器人的行进方向之间的距离偏移信息;计算模块,用于基于多个上述距离偏移信息计算得到距离偏移变化率;以及第二控制模块,用于根据上述距离偏移信息和上述距离偏移变化率控制上述机器人沿上述引导线行驶。
11、本公开的第三方面提供了一种机器人,包括:一个或多个处理器;存储器,用于存储一个或多个程序,其中,当上述一个或多个程序被上述一个或多个处理器执行时,使得一个或多个处理器执行上述方法。
12、本公开的第四方面还提供了一种计算机可读存储介质,其上存储有可执行指令,该指令被处理器执行时使处理器执行上述方法。
13、本公开的第五方面还提供了一种计算机程序产品,包括计算机程序,该计算机程序被处理器执行时实现上述方法。
14、根据本公开提供的机器人运动控制方法、装置、设备、介质和程序产品,通过控制被安装在机器人上的激光扫描装置,扫描在机器人的行进路面上的引导线,得到第一扫描结果,以提升机器人对引导线及行进路面的识别效果;根据第一扫描结果和与机器人的行进方向确定引导线与机器人的行进方向之间的距离偏移信息;基于多个距离偏移信息计算得到距离偏移变化率;根据距离偏移信息和距离偏移变化率控制机器人沿引导线行驶,使得机器人可较快且较为稳定的响应运动控制方法,并执行运动控制,以使机器人具有较强的鲁棒性,以满足金融服务场所中的机器人的行驶控制。
技术特征:
1.一种机器人运动控制方法,包括:
2.根据权利要求1所述的方法,其中,所述通过控制被安装在机器人上的激光扫描装置,扫描在所述机器人的行进路面上的引导线,得到第一扫描结果包括:
3.根据权利要求2所述的方法,其中,所述根据所述第一扫描结果和与所述机器人的行进方向确定所述引导线与所述机器人的行进方向之间的距离偏移信息包括:
4.根据权利要求3所述的方法,其中,所述基于多个所述距离偏移信息计算得到距离偏移变化率包括:
5.根据权利要求4所述的方法,其中,所述根据所述距离偏移信息和所述距离偏移变化率控制所述机器人沿所述引导线行驶包括:
6.根据权利要求5所述的方法,其中,所述对所述模糊输入量进行模糊化处理,基于所述距离偏移信息及所述距离偏移变化率构建模糊规则控制表,并基于所述模糊规则控制表通过模糊推理,获取所述模糊输出量包括:
7.根据权利要求6所述的方法,其中,所述对所述模糊输出量进行解模糊,以获取所述比例、积分及微分控制器的修正量包括:
8.根据权利要求1至7中任一所述的方法,还包括:
9.一种机器人运动控制装置,包括:
10.一种机器人,包括:
11.一种计算机可读存储介质,其上存储有可执行指令,该指令被处理器执行时使处理器执行根据权利要求1~8中任一项所述的方法。
12.一种计算机程序产品,包括计算机程序,所述计算机程序被处理器执行时实现根据权利要求1~8中任一项所述的方法。
技术总结
本公开提供了一种机器人运动控制方法、装置、设备及存储介质,可以应用于机器人控制技术领域及金融科技领域。该方法包括:通过控制被安装在机器人上的激光扫描装置,扫描在上述机器人的行进路面上的引导线,得到第一扫描结果;根据上述第一扫描结果和与上述机器人的行进方向确定上述引导线与上述机器人的行进方向之间的距离偏移信息;基于多个上述距离偏移信息计算得到距离偏移变化率;以及根据上述距离偏移信息和上述距离偏移变化率控制上述机器人沿上述引导线行驶。
技术研发人员:钟翔,刘垚,陶韬,伍佳森
受保护的技术使用者:中国工商银行股份有限公司
技术研发日:
技术公布日:2024/1/14
- 还没有人留言评论。精彩留言会获得点赞!