基于区域分割的子母多无人平台任务分配与协同规划方法
本发明属于机器人,具体涉及一种基于区域分割的子母多无人平台任务分配与协同规划方法。
背景技术:
1、针对现有集中式多无人车任务分配与路径规划框架,本发明加入基于区域嵌套的任务区域分割方法,并采用子母车的异构机器人结构,大大提高了多无人车系统在大地图、多障碍情况下的稳定性和鲁棒性。
2、协同多机器人系统在工业制造、采矿、检验、仓储物流等现实场景中有广泛的运用。在这些场景中,部署单个机器人来执行复杂任务会消耗大量时间与能源。然而,多机器人系统通过协调多个机器人来协作执行并完成大量任务,提供自动重构、低故障损失、高容错性和高鲁棒性的灵活解决方案。在实际应用中,任务数量增加、目标地图增大和地图中障碍物的分布情况都会对多机器人系统任务分配与路径规划操作的准确性造成影响,甚至可能导致其搜索失败。因此,我们需要一种基于区域分割的recbs-ta算法,它扩大了cbs-ta算法的适用范围,并减少了所需的执行单元数量。
3、子母车式的异构多机器人系统的研究目前仍处于萌芽阶段,国内外无人车领域的相应研究成果零星出现,而对于子母车式多机器人任务分配方面研究则近乎空白。因此,我们对多机器人系统在任务分配和路径规划方面的工作进行汇总并讨论应用区域分割解决复杂情况下多机器人系统任务分配与路径规划问题的可能性。
4、任务分配问题:
5、在任务分配问题中,机器人被分为多个组,每组机器人均被分配一系列的任务。目前对多机器人系统的任务分配方法主要分为集中式和分布式。在分布式的任务分配中,每个机器人各自分配自己的任务。该方案既不需要全局连接的网络,又不需要中央服务器。每个机器人在其观测范围内获取相邻机器人的状态,将自己与相邻机器人的执行能力对比,为自己分配最优的任务。这种方法适用于弱通信环境下的大型机器人集群。集中式任务分配方案由一个中央服务器监控各机器人的相对位置、任务状态和剩余能源等信息,并甄别任务执行效率最高的机器人。这种方法较容易受到脆弱通信环境的影响,但相对分布式任务分配,它可以达成任务分配上的共识。目前主流的多机器人任务分配方法主要有:基于市场的任务分配、基于行为的任务分配、基于优化的任务分配和集群任务分配。集群任务分配策略将相似或相邻的任务分成簇,然后将簇分配给特定机器人。这种方法可以减少机器人系统的平均机动距离,适用于野外搜索、紧急救援和库内物流等场景。我们基于集群任务分配的思想,提出了任务区域分割的方法。
6、路径规划问题:
7、在多机器人系统路径规划(mapf)问题中,多数研究基于有标记的情况(labeledcases),即每个机器人的目标是预先分配的。mapf问题的研究通常针对所有机器人的路径成本之和,或集群中全部机器人到达目标所用的总时间进行优化。该问题已被证明是np-hard问题。这种mapf问题可以由基于冲突的搜索(cbs)、m*、组合拍卖或ilp求解器等方法求得最优解。无标记的mapf问题可由分布式的基于拍卖或token的方法求解,但无法在用户指定的次优范围内计算解决方案。我们的方法基于ta-cbs算法,解决无标签的路径规划问题。这种方法是对cbs方法的扩展,使用任意赋值矩阵,不需要任务与机器人的数量相同,且对大型机器人系统有较好的可扩展性。
技术实现思路
1、有鉴于此,本发明的目的是提供一种基于区域分割的子母多无人平台任务分配与协同规划方法,可以减少多任务环境下所需的执行机构,提高多无人车系统的实用性。
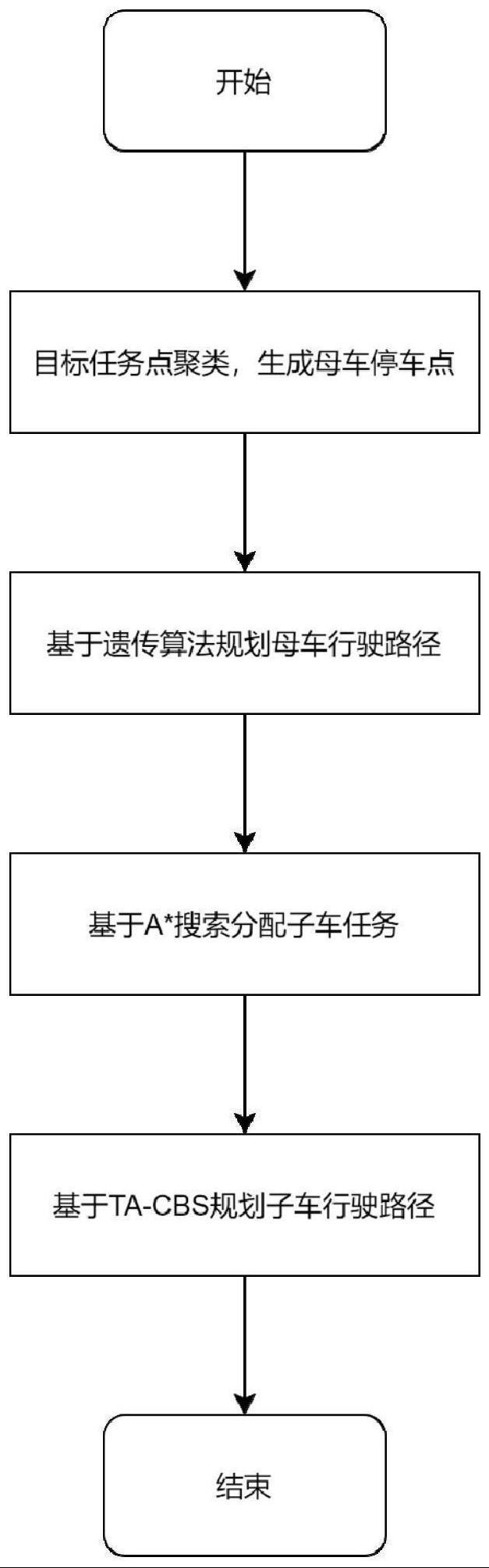
2、基于区域分割的子母多无人平台任务分配与协同规划方法,包括:
3、步骤一、计算目标点集p={p1,p2,...pn}的voronoi镶嵌图,其中,pn表示目标点n的位置;将目标点集p划分为m个多边形区域集合,并对其求解集合覆盖问题,得到最简多边形镶嵌集合a′={a0,a1,...am};
4、步骤二、将镶嵌多边形集合的几何中心集合作为母车的原始停车位置集,通过吸引力优化算法优化得到母车停车位置集;对母车停车位置求解旅行商问题,得到母车的最优行驶路线;对每个母车停车点执行任务分配,得出子车需要负责的目标点集;
5、步骤三、对母车在每一个停车点之间的行驶路线进行规划以规避障碍,然后分配每一次母车停车后子车需要执行的任务并规划避障路线。
6、较佳的,所述步骤一的方法包括:
7、步骤1.1、对目标点集内的点进行voronoi分割,得到一组voronoi多边形,设多边形的顶点为vedges,其中包括含有2个目标点vvpoints的凸多边形和含有3个及以上目标点vvpoints的凸多边形;
8、步骤1.2、判断凸多边形内目标点数量:
9、若目标点数量为2,则不足以计算voronoi镶嵌,此时对vvpoints中的两个目标点中任意选取一个未被镶嵌的目标点x,找到与该目标点x最邻近点集vnears中最近顶点,将该最近顶点与目标点x连线得到的线段记为se;找到以最近顶点为圆心、子车工作范围为半径的圆r,确定线段se与圆r之间的两个交点,两交点连线生成覆盖目标点所需的voronoi边,将该voronoi边以及vvpoints中的另一个目标点进行delauney三角剖分,并转化为voronoi镶嵌图;
10、若目标点数量大于2,则基于目标点计算delauney三角剖分,并转化为voronoi镶嵌图;
11、步骤1.3、针对每一个目标点,计算每个目标点t与每个voronoi镶嵌图顶点v之间的距离,然后给出与目标点t最接近的顶点v作为最优顶点,将其结果与目标点t对应的最邻近点集vnears中的最近顶点进行比较,将更近的顶点作为最后输出的最近顶点,则将该目标点t划分为该最近顶点所属的voronoi镶嵌图;
12、步骤1.4、应用集合覆盖求解器,对于步骤1.2得到的镶嵌图,并根据步骤1.3划分各目标点所属镶嵌图,对不必要的多边形区域进行裁剪,得到一组最小的覆盖全部目标点集的多边形区域集合a′={a0,...,am}。
13、较佳的,所述步骤二的方法包括:
14、步骤2.1、对母车停车点位置进行优化:针对区域a′中的任意一个区域,采用引力优化算法,在有待探索的目标点集内设置一个引力点gp,可以采用点集的重心点、中位点或起始点作为引力点gp;它对所在区域内目标点产生吸引力,根据吸引力算法找到对该区域吸引力最大的点,a′中所有的区域找出的吸引力最大的点,组成停车点集v″;
15、步骤2.2、对母车停车位置求解旅行商问题,优化母车的行驶路线:对于母车停车点集v″={v0,...,vm}以及任意两顶点间的距离利用遗传算法找到最短的,且遍历每个顶点并能返回设定起始点的路径;
16、步骤2.3、对每个母车停车点分配其隶属的子任务,优化母车最终停车位置:将求解集合覆盖问题得到的多边形域集合、遗传算法得出的母车路径序列,代入a*算法建立的目标函数f=g+h,以计算在每个母车停靠点下子车的子路径;其中代价函数g是子车已到达目标点的累计距离,启发函数h是子车需要访问的剩余目标点的距离;计算每段子路径时都将母车停靠点v视作起始节点pstart,以此为基础构建包含有以下信息的节点:代价函数值g、启发函数值h、评价函数值t,具体方法包括如下步骤:
17、步骤2.3.1、检查目标点是否被遍历,对于每个未被遍历的节点pcur,停靠点周围的子车工作范围内的目标点都可作为pcur(初始状态下为pstart)对应的候选邻接点,每一个候选邻接点都可能成为子车的下一个目标点;
18、步骤2.3.2、从起始点pstart开始,找到当前节点pcur的候选邻接点,得到子节点{p1,p2,...pi},再分别找到每个子节点的候选邻接点,以此类推,得到若干条由目标点构成的子车路径序列;
19、步骤2.3.3、判断pcur与pstart是否相等,若相等,则说明子车中途到母车充电补给,将g的值初始化处理;否则子车正常累积里程;
20、步骤2.3.4、对于每条子车路径中的每一个目标点,判断到达该目标点后的里程是否能供子车返回:若不能则说明子车工作范围不足以抵达该目标点并安全返回,该目标无效;若能,将该节点纳入路径结果中;重复上述过程直到遍历子车路径所有目标点;
21、步骤2.3.5、判断从当前停靠点出发的子车路径对应的目标函数f是否比先前计算出的同一停靠点出发的另一条路径目标函数f更小:若更小则说明当前结果优于先前结果,更新轨迹代价函数值g以及评价函数值f,依次类推,遍历所有停靠点出发的所有路径,并更新未被遍历的路径结果列表中的节点;
22、步骤2.3.6、重复执行步骤2.3.1至步骤2.3.5,直至母车路径中的每个停靠点均被遍历,算法最终输出一组目标点序列,使子车目标函数f的总和最小。
23、较佳的,所述步骤三的方法包括:
24、采用a*算法规划母车在每一个停车点之间的避障路线,采用cbs-ta算法分配子车任务并进行路径规划;根据每组子车需执行的任务目标,扩展cbs的高级搜索;在每个高级搜索的节点中添加两项键值:一项描述当前节点是否为根节点,和一项描述当前任务用于低级搜索;cbs-ta算法建立一个搜索森林,在需要时扩展根节点;先检索一个有最优任务分配的根节点,此时不考虑机器人之间可能的冲突;再扩展至其他根节点,同时创建下一个最优任务分配的根节点;计算不考虑其它机器人时,子机器人ai到目标gj所用最短路线的消耗,求得消耗矩阵ci×j;以此划分解决方案,移除某些分配方案,或强制添加某些解决方案,使得分配方案覆盖整个解决方案空间。
25、本发明具有如下有益效果:
26、针对集中式任务分配与路径规划算法在大范围、多障碍情境下成功率低的问题,本发明提出了一种基于区域分割的子母多无人平台任务分配与协同规划方法,以提高多无人车系统在复杂环境下的稳定性和鲁棒性。
27、针对传统cbs算法在执行复杂任务时需要机器人数量多的问题,提出了子母车式的任务分配与路径规划方法
28、本发明通过对目标点区域的voronoi镶嵌,将目标点划分若干个最优区域,适当合并密集部分后分配作为子母车系统工作区域,提高了无人车系统在高负荷环境下的工作效率。
29、采用子母车的形式,母车负责承载货物,并将子车运送到每个区域的停车点;子车负责前往目标点并在目标点完成预定工作,最大限度提升机器人调度执行效率,充分利用机器人续航能力,大大提高了多无人车集群系统的实用性。
30、采用并改进了基于冲突的搜索(cbs)算法,使算法对大型输入有较好的可扩展性和较高的计算速度,同时避免了无人车之间的碰撞,保证了执行任务时的安全性和可靠性。
- 还没有人留言评论。精彩留言会获得点赞!