一种基于多样环境因素的低空飞行器防御系统的制作方法
本发明涉及飞行器,具体涉及一种基于多样环境因素的低空飞行器防御系统。
背景技术:
1、飞行器是任何由人类制造、能飞离地面、在空间飞行并由人来控制的提供给个人使用的飞行物。随着飞行器普及,个人飞行器必然是未来发展方向。轻巧,灵活的低空,低速飞行器将是个人飞行器的发展方向。无人机也被称为无人飞行器,属于低空飞行器的一种。其控制方法是操纵员使用无线电遥控设备远程操纵,或是由无人机自身搭载的计算机按照预设的控制程序进行操纵。由于无人机成本低、风险小、使用方便,因此它在军事和民用领域都有着广泛的应用。
2、现有的无人机自主飞行方案一般是基于gps定位系统并结合气压计、惯性测量单元进行导航,再辅以红外传感器等进行简单避障。但是由于无人机缺乏可靠的环境感知能力,只能适用于障碍物较少的作业环境,且要求控制精度不高的任务,只能用于航拍、测绘等领域。而且由于这种方案高度依赖于卫星gps信号,在无人机与卫星之间存在遮挡时会导致定位失效,容易发生危险,现有的低空飞行器难以适应多样复杂环境因素。
3、为此提出一种基于多样环境因素的低空飞行器防御系统。
技术实现思路
1、本发明的目的在于:为解决上述背景技术中提到的问题,本发明提供了一种基于多样环境因素的低空飞行器防御系统。
2、本发明为了实现上述目的具体采用以下技术方案:
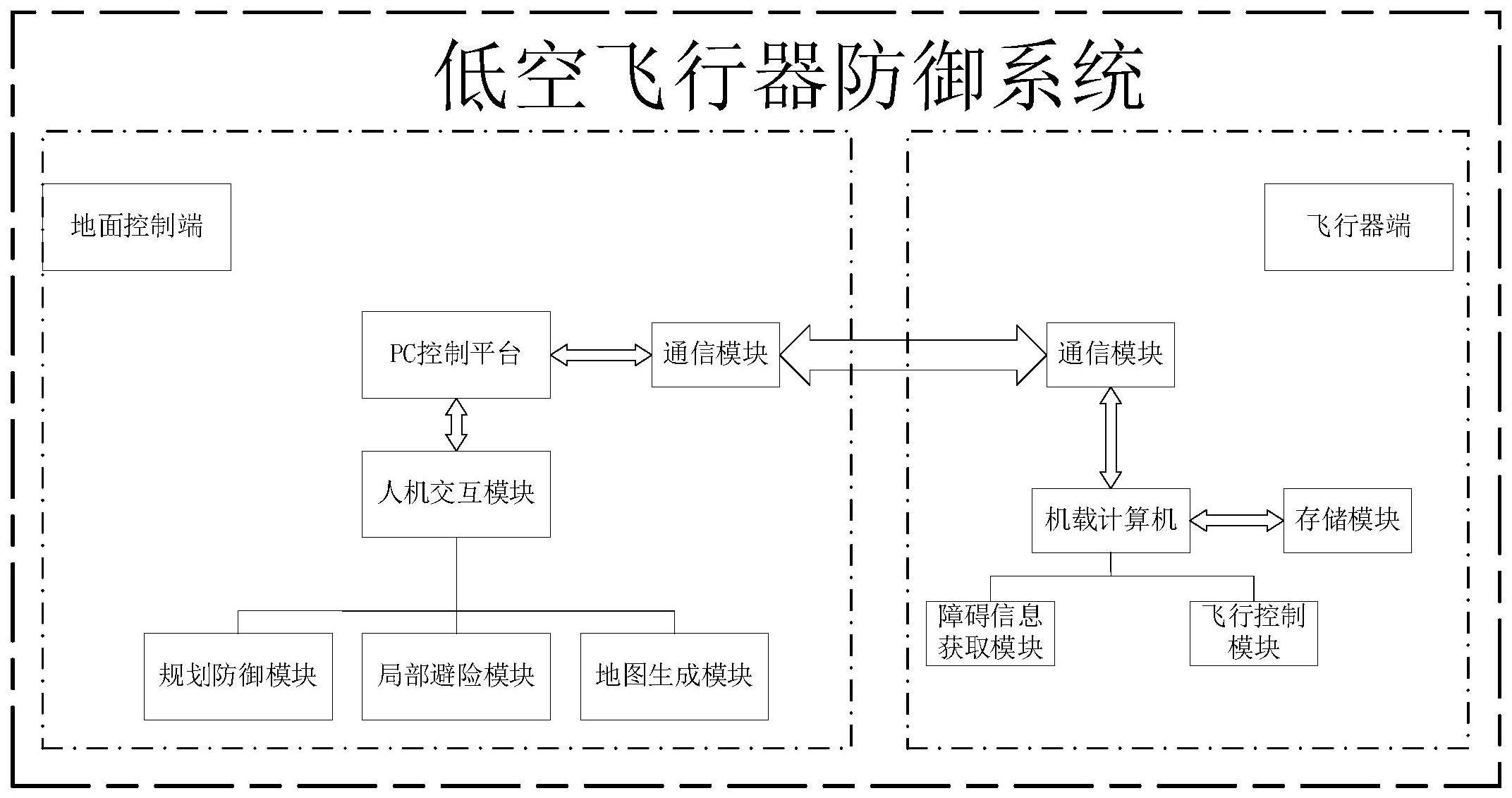
3、一种基于多样环境因素的低空飞行器防御系统,包括地面控制端和飞行器端,所述地面控制端包括pc控制平台、人机交互模块、规划防御模块、局部避险模块和地图生成模块,所述规划防御模块、局部避险模块和地图生成模块均与人机交互模块相连接,所述pc控制平台与人机交互模块相连接,所述飞行器端包括机载计算机、存储模块、障碍信息获取模块、飞行控制模块和存储模块,所述存储模块、障碍信息获取模块、飞行控制模块和存储模块均与机载计算机相连接,所述pc控制平台和机载计算机均连接有通信模块,且两组通信模块远程连接。
4、进一步地,所述障碍信息获取模块包括激光雷达、gps模块、双目视觉模块、风力传感器和雨量传感器。
5、进一步地,所述激光雷达为16线程雷达。
6、进一步地,所述双目视觉模块的输入设备采用两颗usb免驱摄像头,且摄像头焦距可调,摄像头的感光元件使用cmos类型。
7、进一步地,述激光雷达、gps模块、双目视觉模块、风力传感器和雨量传感器收集到的信息通过多传感器融合信息算法进行计算。
8、进一步地,所述人机交互模块设置有触摸屏,且触摸屏实时展示地图生成模块输出的三维地图和飞行器模拟视频。
9、本发明的有益效果如下:
10、本发明当无人机执行飞行任务时,通过飞行器端的障碍信息获取模块来收集环境信息,并通过通信模块传送至地面控制端的地图生成模块,建立起三维地图,并实时发布无人机当前在地图中的位置信息,用户通过人机交互模块能够直观地查看地图,选择飞行路径点,在获取到无人机当前位置和飞行路径点之后,基于生成的三维地图,规划防御模块能够生成一条从无人机当前位置依次到达所有路径点的安全飞行路径,根据障碍信息获取模块实时采集的环境信息,引导无人机在避开地图中未标注的动态障碍的前提下,按照规划好的全局路径飞行,并通过飞行控制模块来对飞行姿态、速度和位置进行控制,通过存储模块可实时存储地面控制端发送的规划信息和实时信息,即使通信终端,飞行器端仍然能够进行自主执行,在使用中实现了便于对低空飞行器在执行任务中遭遇的风险障碍进行规划和自主规避的效果,能够适应地形、天气等多样环境因素影响,同时避免了高度依赖卫星gps而产生的飞行风险,使得低空飞行器执行任务过程更加稳定和安全。
技术特征:
1.一种基于多样环境因素的低空飞行器防御系统,其特征在于,包括地面控制端和飞行器端,所述地面控制端包括pc控制平台、人机交互模块、规划防御模块、局部避险模块和地图生成模块,所述规划防御模块、局部避险模块和地图生成模块均与人机交互模块相连接,所述pc控制平台与人机交互模块相连接,所述飞行器端包括机载计算机、存储模块、障碍信息获取模块、飞行控制模块和存储模块,所述存储模块、障碍信息获取模块、飞行控制模块和存储模块均与机载计算机相连接,所述pc控制平台和机载计算机均连接有通信模块,且两组通信模块远程连接。
2.根据权利要求1所述的一种基于多样环境因素的低空飞行器防御系统,其特征在于,所述障碍信息获取模块包括激光雷达、gps模块、双目视觉模块、风力传感器和雨量传感器。
3.根据权利要求2所述的一种基于多样环境因素的低空飞行器防御系统,其特征在于,所述激光雷达为16线程雷达。
4.根据权利要求2所述的一种基于多样环境因素的低空飞行器防御系统,其特征在于,所述双目视觉模块的输入设备采用两颗usb免驱摄像头,且摄像头焦距可调,摄像头的感光元件使用cmos类型。
5.根据权利要求2所述的一种基于多样环境因素的低空飞行器防御系统,其特征在于,所述激光雷达、gps模块、双目视觉模块、风力传感器和雨量传感器收集到的信息通过多传感器融合信息算法进行计算。
6.根据权利要求1所述的一种基于多样环境因素的低空飞行器防御系统,其特征在于,所述人机交互模块设置有触摸屏,且触摸屏实时展示地图生成模块输出的三维地图和飞行器模拟视频。
技术总结
本发明公开了一种基于多样环境因素的低空飞行器防御系统,涉及飞行器技术领域。本发明包括地面控制端和飞行器端,所述地面控制端包括PC控制平台、人机交互模块、规划防御模块、局部避险模块和地图生成模块,所述规划防御模块、局部避险模块和地图生成模块均与人机交互模块相连接,所述PC控制平台与人机交互模块相连接,所述飞行器端包括机载计算机、存储模块、障碍信息获取模块、飞行控制模块和存储模块,在使用中实现了便于对低空飞行器在执行任务中遭遇的风险障碍进行规划和自主规避的效果,能够适应地形、天气等多样环境因素影响,同时避免了高度依赖卫星GPS而产生的飞行风险,使得低空飞行器执行任务过程更加稳定和安全。
技术研发人员:丁恒,苏丽娟,杜国辉,雷晨,陆振李
受保护的技术使用者:深圳市喜悦智慧数据有限公司
技术研发日:
技术公布日:2024/1/14
- 还没有人留言评论。精彩留言会获得点赞!