一种含不确定时滞的多智能体一致性控制方法
本发明涉及多智能体系统协同控制领域,具体涉及一种含不确定时滞的多智能体一致性控制方法。
背景技术:
1、多智能体系统(multi-agentsystem,mas)因具备分布式、协调性强、可操作性强和鲁棒性强等优点,在计算机科学、系统控制等领域得到了广泛应用。而多智能体系统的一致性问题作为分布式协调控制的基础,得到了更多的关注,如在智能电网的能量传输控制以及群组决策、无线传感网络的自主配置、卫星编队、无人机控制系统等研究中。
2、大部分的研究主要围绕系统复杂性、拓扑复杂性、连接复杂性以及它们不同组合结合展开的,如研究有针对无向拓扑下的二阶多智能体系统,提出基于自适应动态时钟的事件触发控制策略,有效避免了连续通信,节约通信资源,实现一致性控制;并且还针对含执行器故障、未知非线性动态和非匹配干扰的多智能体系统,设计了完全分布式观测器与自适应容错控制协议,解决复杂情况下的一致性问题。
3、然而现有的研究大多只关注了一方面或部分方面,较少的成果同时关注到时滞、未知输入、非线性的情况,在实际系统中,这些复杂情况往往不能避免,为了得到更加符合实际的成果,有必要同时考虑到智能控制中的系统状态的不可观测部分和未知输入问题。
技术实现思路
1、本发明的目的在于提供一种含不确定时滞的多智能体一致性控制方法,解决以下技术问题:
2、怎样解决系统状态中的不可观测部分、未知输入以及不确定时滞和干扰问题,进而实现误差系统的稳定性分析和控制。
3、本发明的目的可以通过以下技术方案实现:
4、一种含不确定时滞的多智能体一致性控制方法,包括以下步骤:
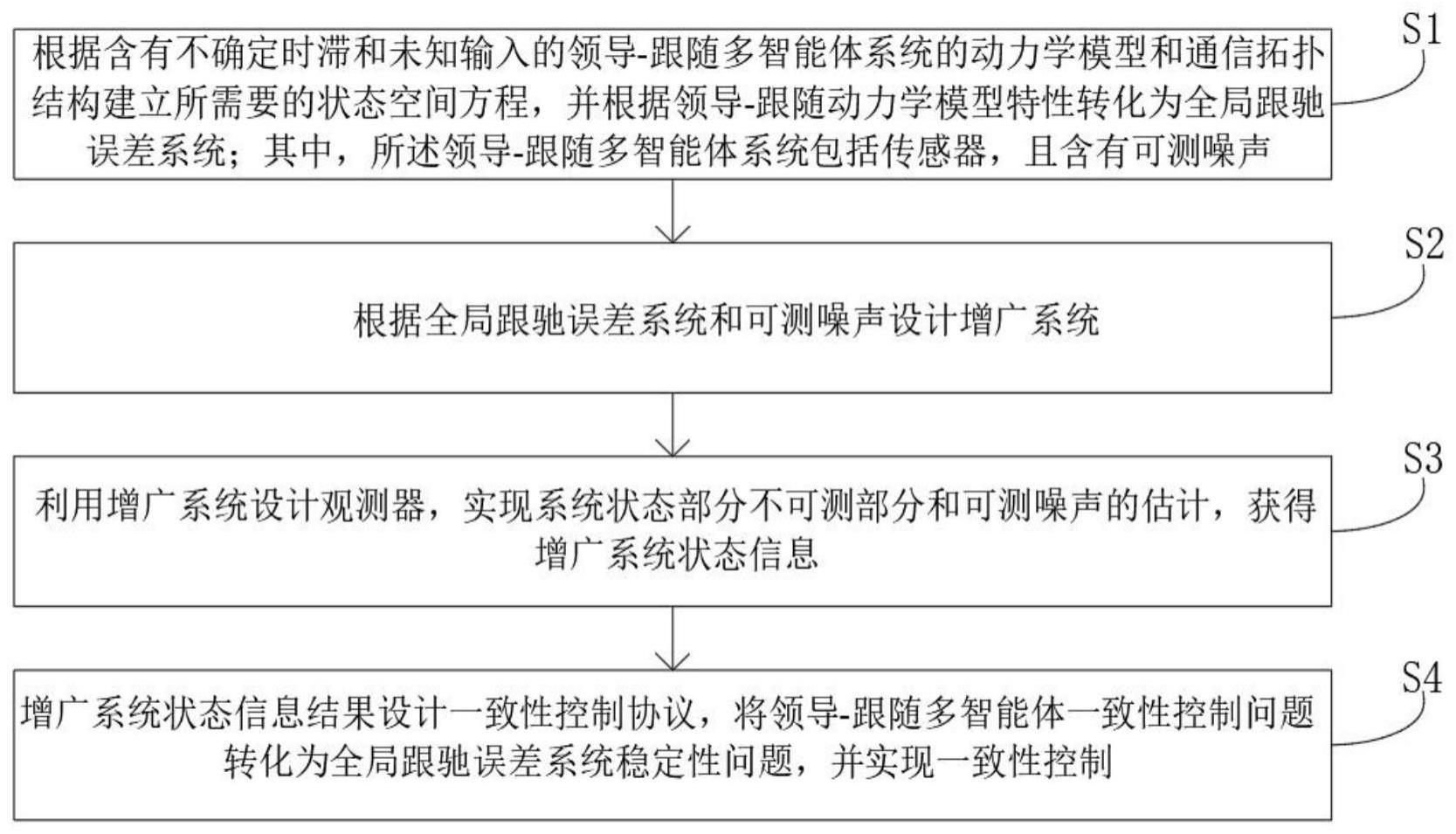
5、s1、根据含有不确定时滞和未知输入的领导-跟随多智能体系统的动力学模型和通信拓扑结构建立所需要的状态空间方程,并根据领导-跟随动力学模型特性转化为全局跟驰误差系统;其中,所述领导-跟随多智能体系统包括传感器,且含有可测噪声;
6、s2、根据全局跟驰误差系统和可测噪声设计增广系统;
7、s3、利用增广系统设计观测器,实现系统状态部分不可测部分和可测噪声的估计,获得增广系统状态信息;
8、s4、利用增广系统状态信息设计一致性控制协议,将领导-跟随多智能体一致性控制问题转化为全局跟驰误差系统稳定性问题,并实现一致性控制。
9、优选地,所述领导-跟随多智能体系统一般包括由1个领导者和n个智能体组成,所述领导-跟随动力学模型包括:领导者动力学模型、跟随者动力学模型,其中,领导者动力学模型为:
10、
11、其中,xi(k)=φ(k),k∈{-τmax,-τmax+1,···,0};
12、第i个跟随者动力学模型可以描述为:
13、
14、其中,表示第i个智能体的状态向量,表示的智能体间延迟状态向量,τmin表示τ的下界,τmax表示τ的上界。表示系统的输入向量,表示系统的输出向量,表示未知输入,表示系统的扰动,表示包含连续非线性函数的函数,a,ad,b,c,d,g是具有已知和适当维度的满秩参数矩阵。
15、优选地,所述全局跟驰误差系统为:
16、
17、其中,δi(k)=x0(k)-xi(k),δi(k)定义为全局状态跟驰误差,x0(k)定义为领导智能体状态,xi(k)定义为第i个跟随智能体的跟驰状态。
18、优选地,所述增广系统设计如下:
19、
20、其中,m=[i 0],
21、由于
22、为满秩矩阵,总存在矩阵t和n,使得:
23、
24、那么,根据上述等式可以进一步将增广系统表示为:
25、
26、优选地,所述步骤s2中观测器的创建设计过程为:
27、由于所述增广系统可以被控制和观测,则设计比例积分观测器:
28、
29、其中,是系统状态向量χi(k)的估计值,非线性函数的估计值记作观测器的增益矩阵表示为l1和l2。
30、优选地,所述状态信息包括状态估计和未知输入,并由此设计出估计误差:
31、
32、其中,ei(k)表示状态估计误差,ηi(k)表示未知输入误差;确保和则观测器能够实现对系统状态和未知输入的准确估计。
33、优选地,为实现所述观测器对所述状态估计和未知输入进行状态估计有效性分析,设计出以下误差系统,包括:
34、
35、其中,根据上式,所述增广系统的观测器误差系统可以进一步写为:
36、
37、且所述增广系统的观测器估计误差系统可以进行线性变换:
38、
39、
40、进一步简化为以下形式:
41、
42、定义
43、
44、根据kronecker乘积的性质,所述增广系统观测器的估计误差系统可以表示为以下形式:
45、
46、优选地,所述一致性控制协议的公式为:
47、
48、其中,当前状态和延迟状态之间的耦合强度分别定义为α和β,表τ(k)≥0示通信时延,ni表示节点i的邻居节点集合,aij表示节点i与节点j之间的连接权重,k是一致性控制协议增益矩阵。
49、优选地,所述步骤s4中全局跟驰误差系统稳定性分析公式为:
50、
51、优选地,所述一致性控制协议分析包括分析全局跟驰系统状态:系统输入ui(k)、全局跟驰系统状态δi(k)、全局跟驰系统输出状态yi(k)和原系统状态xi(k)。
52、本发明的有益效果:
53、(1)本发明针对带有通讯时滞、未知输入、可测噪声和非线性项的领导-跟随多智能体系统,通过将领导-跟随动力学模型特性转化为全局跟驰误差系统;并根据全局跟驰误差系统和可测噪声设计增广系统,再利用全局跟驰误差系统设计了一种观测器,解决了系统状态中的不可观测部分和未知输入问题;同时基于观测器提出一种解决含不确定时滞的多智能体系统一致性控制的协议,将系统的一致性控制问题转化为误差系统的稳定性问题。
54、(2)本发明还通过解决满足lipschitz条件的非线性项的线性矩阵不等式,基于图论和lyapunov-krasovkii函数,得到了一种可行的解决方案,可以实现误差系统的稳定性问题分析和判断。
55、(3)本发明还基于现有技术,增强了系统的鲁棒性并减少了保守性,通过实验仿真验证了可行性和正确性;通过控制领导者的运动来完成系统状态控制,极大简化了控制过程和降低了控制成本。
56、当然,实施本发明的任一产品并不一定需要同时达到以上所述的所有优点。
技术特征:
1.一种含不确定时滞的多智能体一致性控制方法,其特征在于,包括以下步骤:
2.根据权利要求1所述的一种含不确定时滞的多智能体一致性控制方法,其特征在于,所述领导-跟随多智能体系统一般包括由1个领导者和n个智能体组成,所述领导-跟随动力学模型包括:领导者动力学模型、跟随者动力学模型,其中,领导者动力学模型为:
3.根据权利要求1所述的一种含不确定时滞的多智能体一致性控制方法,其特征在于,所述全局跟驰误差系统为:
4.根据权利要求1所述的一种含不确定时滞的多智能体一致性控制方法,其特征在于,所述增广系统设计如下:
5.根据权利要求4所述的一种含不确定时滞的多智能体一致性控制方法,其特征在于,所述步骤s2中观测器的创建设计过程为:
6.根据权利要求1所述的一种含不确定时滞的多智能体一致性控制方法,其特征在于,所述状态信息包括状态估计和未知输入,并由此设计出估计误差:
7.根据权利要求6所述的一种含不确定时滞的多智能体一致性控制方法,其特征在于,为实现所述观测器对所述状态估计和未知输入进行状态估计有效性分析,设计出以下误差系统,包括:
8.根据权利要求1所述的一种含不确定时滞的多智能体一致性控制方法,其特征在于,所述一致性控制协议的公式为:
9.根据权利要求1所述的一种含不确定时滞的多智能体一致性控制方法,其特征在于,所述步骤s4中全局跟驰误差系统稳定性分析公式为:
10.根据权利要求1所述的一种含不确定时滞的多智能体一致性控制方法,其特征在于,所述一致性控制协议分析包括分析全局跟驰系统状态:系统输入ui(k)、全局跟驰系统状态δi(k)、全局跟驰系统输出状态yi(k)和原系统状态xi(k)。
技术总结
本发明公开了一种含不确定时滞的多智能体一致性控制方法,包括以下步骤:根据含有不确定时滞和未知输入的领导‑跟随多智能体系统的动力学模型和通信拓扑结构建立所需要的状态空间方程,并根据领导‑跟随动力学模型特性转化为全局跟驰误差系统;然后,根据全局跟驰误差系统和可测噪声设计增广系统;接着,利用增广系统设计观测器,实现系统状态部分不可测部分和可测噪声的估计,获得增广系统状态信息;最后,利用增广系统状态信息设计一致性控制协议,将领导‑跟随多智能体一致性控制问题转化为全局跟驰误差系统稳定性问题,并实现一致性控制;通过不可观测部分和未知输入问题,实现误差系统的稳定性判断。
技术研发人员:郭胜辉,罗世坚
受保护的技术使用者:苏州科技大学
技术研发日:
技术公布日:2024/1/14
- 还没有人留言评论。精彩留言会获得点赞!