一种基于非惯性系的旋翼无人机模型预测控制方法及装置
本发明属于无人机控制领域,尤其涉及一种基于非惯性系的旋翼无人机模型预测控制方法及装置。
背景技术:
1、近年来,旋翼无人机以其尺寸小、重量轻、机动性强、灵活度高等优点被广泛应用于航拍、监测、探索及救援等领域,并快速推动了多机器人系统的发展,特别是在定点跟随、自主降落以及轨迹跟踪等旋翼无人机与移动目标的协同交互任务中,已经进行了广泛的研究与应用。对于这些交互式任务,往往需要旋翼无人机相对目标的准确状态估计信息作为反馈量来控制其在惯性参考系下的运动。控制器通常需要完整的系统模型才能精确地控制旋翼无人机飞行,良好的轨迹规划与持续的重规划环节也是旋翼无人机稳定高效完成上述复杂任务的重要保障。常见机载相对状态估计方法多是采用计算机视觉技术,或是直接由外部设备(动作捕捉系统、超宽带定位系统)提供,但二者都难以避免轨迹重规划操作,这无疑大大增加了系统的计算负载与复杂程度。且由于交互目标通常处于无法预测的随机移动过程中,旋翼无人机难以获得目标准确的运动模型作为先验知识。综上所述,惯性参考系下传统的旋翼无人机控制面临着如下难题:需要准确估计旋翼无人机与目标的相对状态;无法避免频繁复杂的轨迹重规划操作;难以获取用于预测的目标运动模型。
2、考虑到目标移动过程中旋翼无人机完成定点跟随、自主降落以及轨迹跟踪等交互式任务的不同特征与挑战,近年来已有大量工作分别对其进行了研究。现有技术[1]在主动估计相对位置的leader-follower网络上使用了一种基于复杂拉普拉斯的相似群体控制算法实现了定点跟随的目标。现有技术[2]为旋翼无人机与无人车的协作系统提出了一种基于视觉的自主降落方法,利用无人车平台上的多个qr码来估计二者间的相对距离、速度与方向,并在此基础上为四旋翼无人机在移动平台上的降落任务设计了一种基于控制屏障函数(cbf)与控制李雅普诺夫函数(clf)的速度控制器。现有技术[3]中同样提出了一种自主降落的方法,使用拓展卡尔曼滤波与视觉惯性里程计进行位姿估计,并通过类似的标签识别方式获取旋翼无人机相对无人车的状态估计信息。该技术还在系统中集成了局部轨迹规划算法,以保证更安全地完成任务。现有技术[4]提出了一种旋翼无人机对移动目标进行安全轨迹跟踪的解决方案,通过对目标运动的进行预测并结合启发式轨迹规划方法,达到旋翼无人机在密集环境规划安全轨迹并跟踪的目的。然而,上述方法均是在惯性系下完成对旋翼无人机的控制与状态估计工作,对目标运动模型通常也只是进行简单的假设(匀速/匀加速),缺乏目标进一步的动力学信息(角速度与线加速度),导致所提出系统难以在目标移动较为剧烈时实现对旋翼无人机的控制。
3、在涉及具体的旋翼无人机控制方法时,模型预测控制无疑是近年来的热点。现有技术[5]将感知项与动作项添加到优化问题里,设计了一种适用于四旋翼无人机的非线性模型预测控制器。实验中,视觉惯性里程计与该控制器在机载电脑上实时运行,四旋翼无人机需在跟踪一条轨迹的同时始终保持感兴趣的目标点在其视野中。但此类方法同样是在惯性系下完成对旋翼无人机的控制工作,对于实现移动目标的定点跟随、自主降落以及轨迹跟踪等任务,仍无法避免频繁复杂的轨迹重规划操作,不仅增加了机载电脑的计算负担,也在一定程度上降低了系统的可靠性。
4、而在现有的相关文献中,对非惯性系下旋翼无人机建模与控制方面的研究还相对较少,此类技术在航天器近距离操作领域更受欢迎。现有技术[6]研究了四旋翼无人机在未发生旋转变换的非惯性系中的动力学模型,即所参考的非惯性系只进行平移变换,并使用滑模控制器进行轨迹跟踪。该技术虽然为非惯性系下的旋翼无人机控制提供了新的思路与方向,但由于动态模型中缺少非惯性系的旋转变换,模型的应用范围较为有限。
5、参考文献:
6、[1]z.han,k.guo,l.xie,and z.lin,“integrated relative localization andleader–follower formation control,”ieee transactions on automatic control,vol.64,no.1,pp.20–34,2018.
7、[2]g.niu,q.yang,y.gao,and m.-o.pun,“vision-based autonomous landingfor unmanned aerial and ground vehicles cooperative systems,”ieee roboticsand automation letters,vol.7,no.3,pp.6234–6241,jul.2022,doi:10.1109/lra.2021.3101882.
8、[3]p.wang,c.wang,j.wang,and m.q.-h.meng,“quadrotor autonomous landingon moving platform.”arxiv,aug.10,2022.doi:10.48550/arxiv.2208.05201.
9、[4]z.han,r.zhang,n.pan,c.xu,and f.gao,“fast-tracker:arobust aerialsystem for tracking agile target in cluttered environments,”in ieeeinternational conference on robotics and automation(icra).ieee,2021,pp.328–334.
10、[5]d.falanga,p.foehn,p.lu,and d.scaramuzza,“pampc:perceptionawaremodel predictive control for quadrotors,”in 2018ieee/rsj internationalconference on intelligent robots and systems(iros),oct.2018,pp.1–8.doi:10.1109/iros.2018.8593739.
11、[6]y.marani,k.telegenov,e.feron,and m.-t.l.kirati,“drone referencetracking in a non-inertial frame:control,design and experiment,”in 2022ieee/aiaa 41st digital avionics systems conference(dasc),portsmouth,va,usa,sep.2022,pp.1–8.doi:10.1109/dasc55683.2022.9925849.
技术实现思路
1、针对现有技术存在的不足,本发明提出一种基于非惯性系的旋翼无人机模型预测控制方法及装置。本发明利用旋翼无人机相对于参考目标的位姿与速度以及参考目标在惯性参考系下的角速度与加速度信息,在不依赖额外的惯性系定位设备与状态估计模块(如gps、slam)、目标运动模型先验信息以及复杂轨迹重规划操作的情况下,实现了旋翼无人机在非惯性系下的稳定飞行。
2、根据本技术实施例的第一方面,提供一种基于非惯性系的旋翼无人机模型预测控制方法,包括:
3、(1)根据惯性系、非惯性系与旋翼无人机机体系之间的关系,建立旋翼无人机在非惯性系下的动力学模型;
4、(2)根据所述动力学模型,设计旋翼无人机的非线性模型预测控制器;
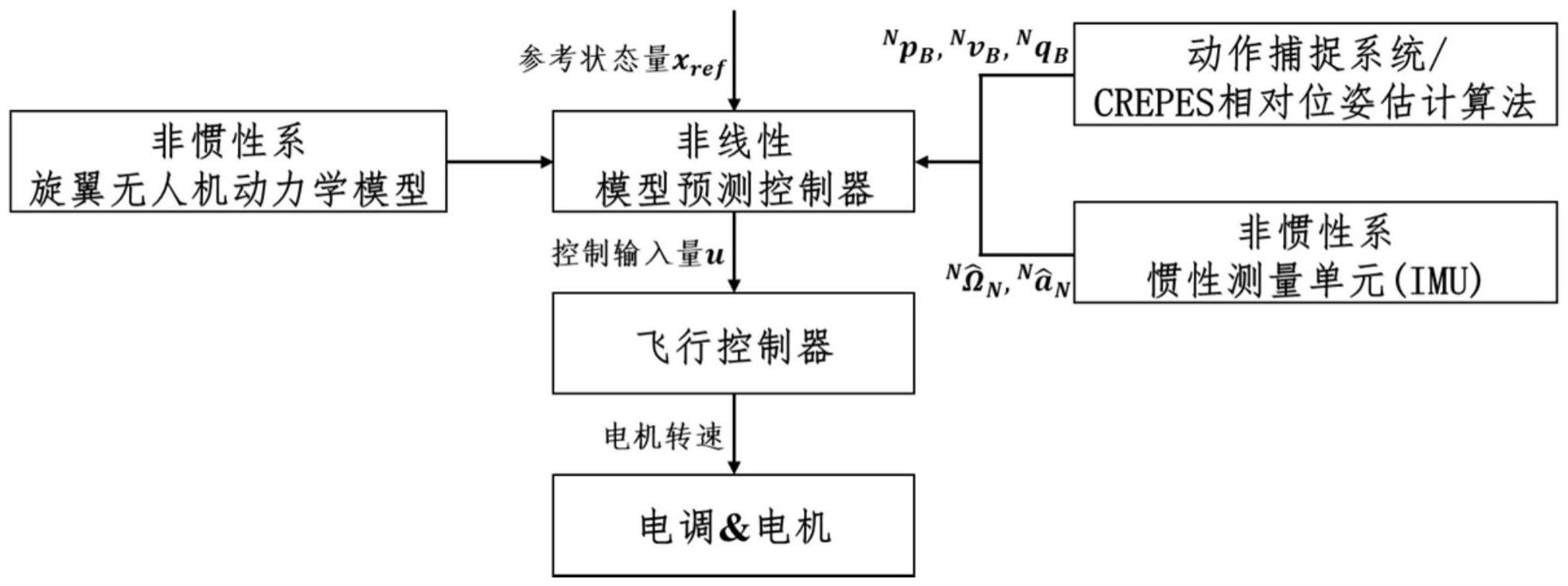
5、(3)利用序列二次规划算法,结合动作捕捉系统或crepes给出的相对位姿以及非惯性系上的惯性测量单元采集的状态信息求解所述非线性模型预测控制器中的优化问题,得到旋翼无人机总推力与三轴角速度控制量,从而实现在非惯性系下对旋翼无人机的飞行控制。
6、进一步地,步骤(1)包括:
7、根据惯性系、非惯性系与旋翼无人机机体系之间的关系,得到旋翼无人机在非惯性系中的相对位置其中nrw表示惯性系w相对于非惯性系n的旋转矩阵,表示非惯性系n与旋翼无人机机体系b与在惯性系w下的相对位移向量;
8、通过对上式进行求导,得到旋翼无人机在非惯性系中的相对速度nvb与相对加速度表示为:
9、
10、
11、其中,[nωn]×与[nβn]×分别表示非惯性系n的角速度nωn与角加速度nβn的反对称矩阵,nrb表示旋翼无人机机体系b相对于非惯性系n的旋转矩阵,t表示旋翼无人机归一化后的总推力,g=[0,0,-g]t表示重力加速度,nrwan为非惯性系n下表示的其自身线加速度;
12、通过对所述相对速度和相对加速度中的nrb进行求导并转换为四元数的形式,得到旋转部分的动力学模型:
13、
14、
15、其中,bωb与[bωb]×分别表示旋翼无人机机体系b的角速度及其反对称矩阵,nqb表示旋转矩阵nrb的四元数形式,⊙表示四算数乘法的哈密顿积。
16、进一步地,所述非线性模型预测控制器的状态量输入量其中npb为旋翼无人机在非惯性系中的相对位置,nvb为旋翼无人机在非惯性系中的相对速度,nqb为旋转矩阵nrb的四元数形式,表示旋翼无人机在非惯性系中的相对姿态,和分别为从imu上直接测量得到的非惯性系n的角速度与线加速度值,nβn为非惯性系n的角加速度,t表示旋翼无人机归一化后的总推力,分别为旋翼无人机机体系b的三轴角速度。
17、进一步地,所述非线性模型预测控制器为:
18、
19、s.t.x(0)=x0
20、x(k+1)=fd(x(k),u(k))
21、tmin≤t≤tmax
22、
23、
24、
25、其中,‖x‖q=xtqx,x(k)与u(k)表示k时刻的状态量与输入量,x(k)ref与x(n)ref表示k时刻的参考状态量,uh表示参考输入量(uh=[g;0;0;0],即始终以旋翼无人机悬停时的输入量作为参考输入量),q=diag(qx),qx与qn为各个系统状态量的正定权重矩阵,r为系统输入量的正定权重矩阵;对于约束部分,fd(x(k),u(k))是对所述动力学模型的微分方程形式f(x,u)的离散化表示,tmin与tmax分别表示最小与最大推力限制,ωrp与ωyaw分别表示roll与pitch以及yaw方向的角速度限制。
26、进一步地,在步骤(3)中,基于所述动作捕捉系统或crepes给出的相对位姿以及惯性测量单元上直接获取的非惯性系角速度与线加速度,并将其角加速度的估计量和参考量设置为0,即假设非惯性系始终在平面上进行运动,从而对所述的控制器进行求解。
27、根据本技术实施例的第二方面,提供一种基于非惯性系的旋翼无人机模型预测控制装置,包括:
28、建模模块,用于根据惯性系、非惯性系与旋翼无人机机体系之间的关系,建立旋翼无人机在非惯性系下的动力学模型;
29、设计模块,用于根据所述动力学模型,设计旋翼无人机的非线性模型预测控制器;
30、求解模块,用于利用序列二次规划算法,结合动作捕捉系统或crepes给出的相对位姿以及非惯性系上的惯性测量单元采集的状态信息求解所述非线性模型预测控制器中的优化问题,得到旋翼无人机总推力与三轴角速度控制量,从而实现在非惯性系下对旋翼无人机的飞行控制。
31、根据本技术实施例的第三方面,提供一种电子设备,包括:
32、一个或多个处理器;
33、存储器,用于存储一个或多个程序;
34、当所述一个或多个程序被所述一个或多个处理器执行,使得所述一个或多个处理器实现如第一方面所述的方法。
35、根据本技术实施例的第四方面,提供一种计算机可读存储介质,其上存储有计算机指令,该指令被处理器执行时实现如第一方面所述方法的步骤。
36、本技术的实施例提供的技术方案可以包括以下有益效果:
37、由上述实施例可知,本技术在非惯性系下建立的旋翼无人机动力学模型,消除了传统建模方法中对于惯性系状态估计的依赖;由于非惯性系直接建立在移动目标的机体系上,在仅利用移动目标惯性测量单元的角速度与线加速度信息,而无需目标运动模型等难以获取的信息作为先验知识的情况下,即可实现旋翼无人机与移动目标之间复杂的协同交互任务,并避免了以往惯性系中频繁轨迹重规划所带来的影响;所设计的非线性模型预测控制方案,将非惯性系的角速度、线加速度与角加速度信息添加到了系统的状态量中,实现了高精度、高稳定性、高适应性的非惯性系旋翼无人机飞行运动控制效果,并利于未来对系统进行改进。本技术解决了传统惯性系下旋翼无人机飞行控制对于额外状态估计、目标运动模型以及频繁轨迹重规划的依赖,拓展了定点跟随、自主降落及轨迹跟踪等交互式任务的应用,并验证了该系统对于现有相对位姿估计算法的适应性。
38、应当理解的是,以上的一般描述和后文的细节描述仅是示例性和解释性的,并不能限制本技术。
- 还没有人留言评论。精彩留言会获得点赞!