电驱动控制器耐久性激活测试的闭环控制方法及系统与流程
本发明涉及电驱动控制器,具体涉及一种电驱动控制器耐久性激活测试的闭环控制方法及系统。
背景技术:
1、现有的电驱动控制器耐久性激活测试采用pcan或canoe等开发硬件工具配合上位机软件可以用于监测录取电驱动控制器发出的can报文,但无对外扩展的i/o功能,如果需要进行外部i/o扩展,则需定制专用i/o板卡。plc作为工业生产的逻辑控制基础单元,具有强大的i/o及模拟量监测、控制能力,且通信模式也多种多样。但一般情况下国际一线品牌(例如西门子、三菱等)的低端plc不具备can报文的收发能力。而这些厂家的中、高端plc必须配置自己厂家生产的专用can通信模块才能实现can报文的收发。基于以上情况,现有的电驱动控制器耐久性激活测试中,只进行开环控制。电驱动控制器实际测试过程中是否是按照预设工况运行并不能被知晓,导致测试结果不准确。且在运行过程中若出现报错,需要及时暂停/终止工况,但由于开环控制并不能发现报错,不能及时暂停/终止工况,易导致被测电驱动控制器损坏。
2、此外,目前主要模拟旋变(即旋转变压器)的工装或设备多使用直流电机、开环步进电机或者交流伺服电机,来模拟电驱动中的转子带动旋变高速旋转。直流电机一般为定转速,可以通过专用控制器进行调速,但是调速不精确。开环步进电机最高转速一般只能600rpm,转速较低。且当长时间在最高转速运转时,容易过热故障。伺服电机价格昂贵,在此应用场景中性价比很低。并且一个步进(直流、伺服)电机只能带动一个旋变,模拟一个旋变信号。
技术实现思路
1、本发明的目的就是针对现有技术的缺陷,提供一种电驱动控制器耐久性激活测试的闭环控制方法及系统,能实现电驱动控制器耐久性激活测试的闭环控制。
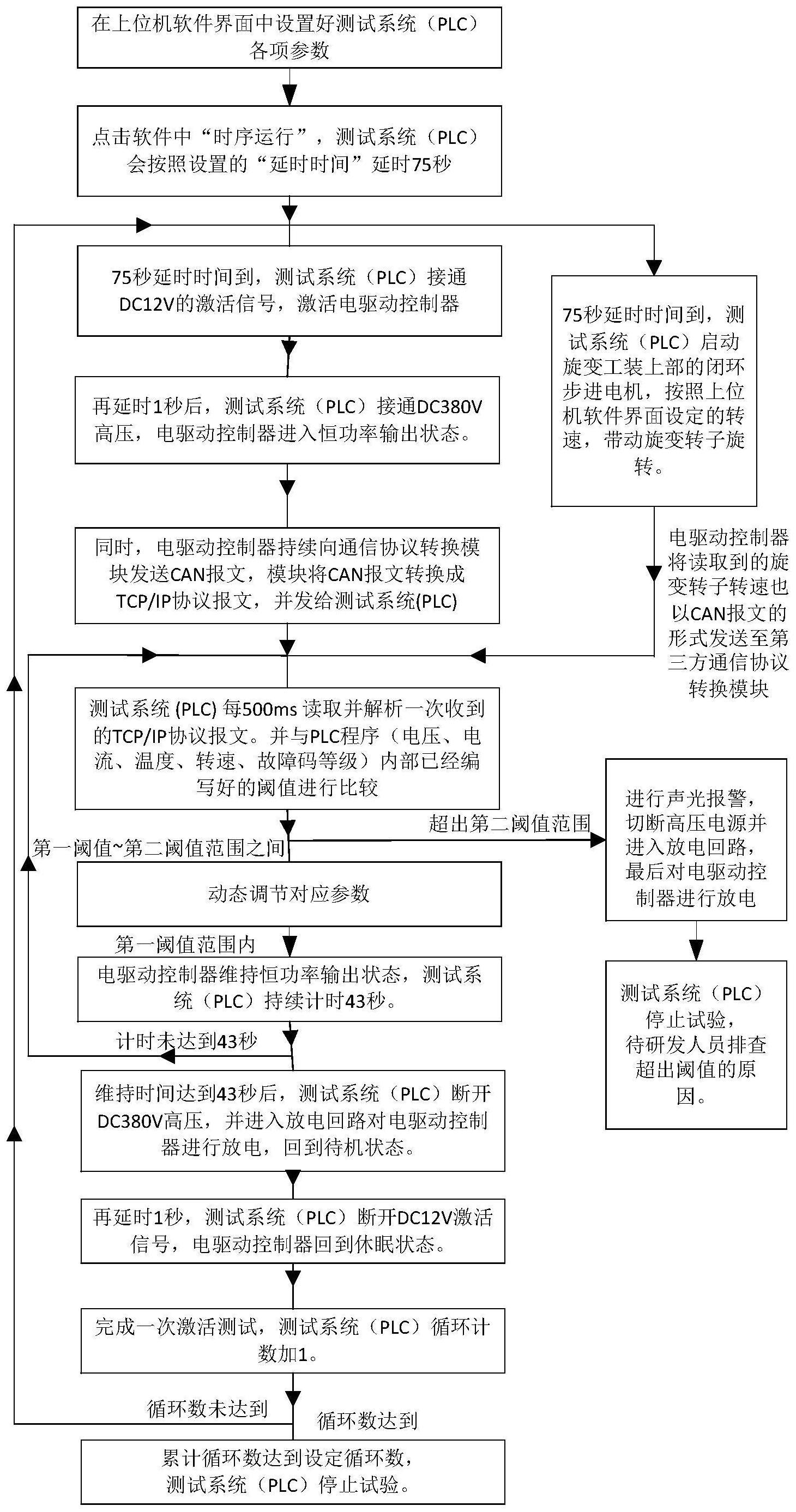
2、本发明提供一种电驱动控制器耐久性激活测试的闭环控制方法,包括以下步骤:
3、plc接通低压电源,激活电驱动控制器,同时启动旋变工装的闭环步进电机,使其按照预设转速带动旋变转子旋转;
4、延时一段指定时长t2后,plc接通高压电源,同时电驱动控制器按照固定周期循环对外发送can报文;
5、通讯协议转换模块接收can报文并将所述can报文转换为tcp/ip协议后,发送至plc;
6、plc读取到tcp/ip协议报文后,按照预先定义的被测样机通信协议矩阵对所述tcp/ip协议报文进行解析,若解析出故障等级达到告警等级或任一参数的阈值超出第二阈值范围,则进行告警;若任一参数的阈值位于第一阈值范围和第二阈值范围之间,且无故障或故障等级小于告警等级,则动态调节对应参数直至该参数的阈值位于第一阈值范围内;若所有参数的阈值均位于第一阈值范围内且无故障或故障等级小于告警等级,则电驱动控制器维持恒功率输出状态;
7、持续一段指定时长t3后,plc断开高压电源,并进入放电回路对电驱动控制器进行放电;
8、延时一段指定时长t4后,plc断开低压电源,完成一次激活测试,循环计数加1;
9、重复上述操作,直至累计循环数达到预设次数,停止试验。
10、较为优选的,所述plc读取到tcp/ip协议报文后,按照预先定义的被测样机通信协议矩阵对所述tcp/ip协议报文进行解析,包括:
11、当发现所述tcp/ip协议报文在第一特定地址的某个字节值变为指定值时,认为被测电驱动控制器出现故障,且故障码保护等级为指定值,所述指定值为故障码保护等级1~n中的任一值;
12、当发现所述tcp/ip协议报文在第二特定地址的某个字节值超出第二阈值范围时,则认为该字节对应参数的阈值超出第二阈值范围;
13、当发现所述tcp/ip协议报文在第二特定地址的某个字节值位于第一阈值范围与第二阈值范围之间时,则认为该字节对应参数的阈值位于第一阈值范围与第二阈值范围之间;
14、当发现所述tcp/ip协议报文在第二特定地址的某个字节值位于第一阈值范围内时,则认为该字节对应参数的阈值位于第一阈值范围内。
15、较为优选的,当故障码保护等级达到告警等级或任一参数的阈值超出第二阈值范围时,切断高压电源,再将电驱动控制器供电电路切入到放电电路。
16、较为优选的,所述plc接通低压电源前,还包括:
17、在上位机中设置plc参数;
18、上位机发送时序运行指令,延时一段指定时长t1;
19、其中,所述设置plc参数包括设定ign信号起/止时间、设定旋变信号起/止时间、设定高压直流信号起/止时间、设定耐久循环次数、设定每次循环的间隔时间、设定旋变转子的转速、设定被测样机的故障码保护等级及故障码报警提示。
20、本发明还提供一种用于实施上述方法的系统,包括:
21、plc,用于根据预设的plc参数执行耐久性激活测试,并在测试中按照预先定义的被测样机通信协议矩阵对tcp/ip协议报文进行解析,并根据解析结果动态调整参数或向告警模块发送告警信号;
22、通讯协议转换模块,用于接收can报文并将所述can报文转换为tcp/ip协议后发送至plc;
23、旋变工装,用于在闭环步进电机的驱动下按照预设转速带动旋变转子旋转;
24、告警模块,用于根据plc发送的告警信号进行告警。
25、本发明还提供一种用于电驱动控制器耐久性激活测试的旋变工装,包括闭环步进电机和多个旋转变压器,所述闭环步进电机的主轴竖直设置,多个所述旋转变压器层级设置于所述主轴上,所述旋转变压器的线束水平引出。
26、较为优选的,还包括层级设置于闭环步进电机下方的旋变布置板,所述旋变布置板由绝缘材料制成,所述旋变布置板中心设有旋变过孔,所述旋转变压器设置于所述旋变过孔处,各个所述旋转变压器的定子分别通过一个旋变压板与对应的旋变布置板固定连接,所述主轴上从上至下均匀设有多个键槽,各个所述旋转变压器的转子分别通过对应键槽与所述主轴键连接。
27、较为优选的,所述主轴首尾两端设有用于防止主轴上下窜动的轴承。
28、较为优选的,还包括透明围板,旋变工装设置于所述透明围板形成的空间内,所述透明围板上设有接线端子,所述接线端子一端与所述旋转变压器的线束连接,另一端与电驱动控制器连接。
29、本发明的有益效果为:
30、1、本方法设置单独的通讯协议转换模块,用于将can报文转换为tcp/ip协议后发送至plc,通过工业级的tcp转can模块,实现plc读取并解析报文信息,实现闭环控制。不需要定制i/o板卡来实现外部电气控制。plc读取到tcp/ip协议报文后,按照预先定义的被测样机通信协议矩阵对tcp/ip协议报文进行解析,若解析出故障等级达到告警等级或任一参数的阈值超出第二阈值范围,则进行告警;若任一参数的阈值位于第一阈值范围和第二阈值范围之间,且无故障或故障等级小于告警等级,则动态调节对应参数直至该参数的阈值位于第一阈值范围内;若所有参数的阈值均位于第一阈值范围内且无故障或故障等级小于告警等级,则电驱动控制器维持恒功率输出状态。从而通过对报文的解析实现故障和电驱动控制器相关参数的实时监测和动态调节,使电驱动控制器始终按照指定的工况运行,保证了测试结果的准确性。同时在发生故障或参数值超出安全阈值时,能及时终止测试,防止电驱动控制器损坏,其安全性高。
31、2、闭环步进电机+plc的组合能实现较高转速(最高2000rpm),也能精确控制和反馈转速。长时间在较高转速条件下运转只是轻微发热,且噪音低,振动小,性价比极高。而plc也能很方便的控制“闭环步进系统”。
32、3、旋变工装采用闭环步进电机和多个旋转变压器,每一个旋变可以对应一台被测样机,可同时测试多台电驱动总成。在保证转速和扭矩满足要求的前提下,大大提升了效费比。多个旋变转子通过方键卡接在竖直设置的同一个主轴上,每个旋变转子都与闭环步进电机电机主轴同步运动。不会由于旋变转子的重力导致主轴的窜动,且机械加工时同心度精度更容易保证。
- 还没有人留言评论。精彩留言会获得点赞!