一种基于IABC优化模糊PID的恒流泵控制系统的制作方法
本发明涉及恒流泵控制系统相关,具体为一种基于iabc优化模糊pid的恒流泵控制系统。
背景技术:
1、恒流泵是一种通过调节电流来控制流量的泵,常见于实验室中的化学、生物等应用领域。恒流泵可以输出恒定的流量或体积,通常采用微型泵或齿轮泵等形式。恒流泵的工作原理是通过调节泵电机的电流来控制泵的转速和流量,从而实现恒定的流量输出。因其精度高、稳定性好、体积小等优点,已广泛应用于实验室中的液相、气相等流体传输领域。电机控制部分负责通过调节电流来控制泵的转速和流量,驱动电源则提供稳定的电源供应。
2、由于传统的pid控制存在调整时间较长,超调量大,控制精度不高等问题,不能保证良好的动态性能。针对pid控制存在的问题,将自适应控制方法和预测控制方法结合起来,不仅维持了自适应控制方法本身的特性,还具备预测控制方法的控制效果好、鲁棒性强等优点,但此方法的理论研究集中于简单的线性化系统中,对于非线性的系统研究很缺乏。在pid控制中引入模糊控制,通过模糊控制对控制参数进行整定,大大的优化了参数的整定过程,但这种优化pid参数的方法过于依赖专家和操作人员的实际经验。
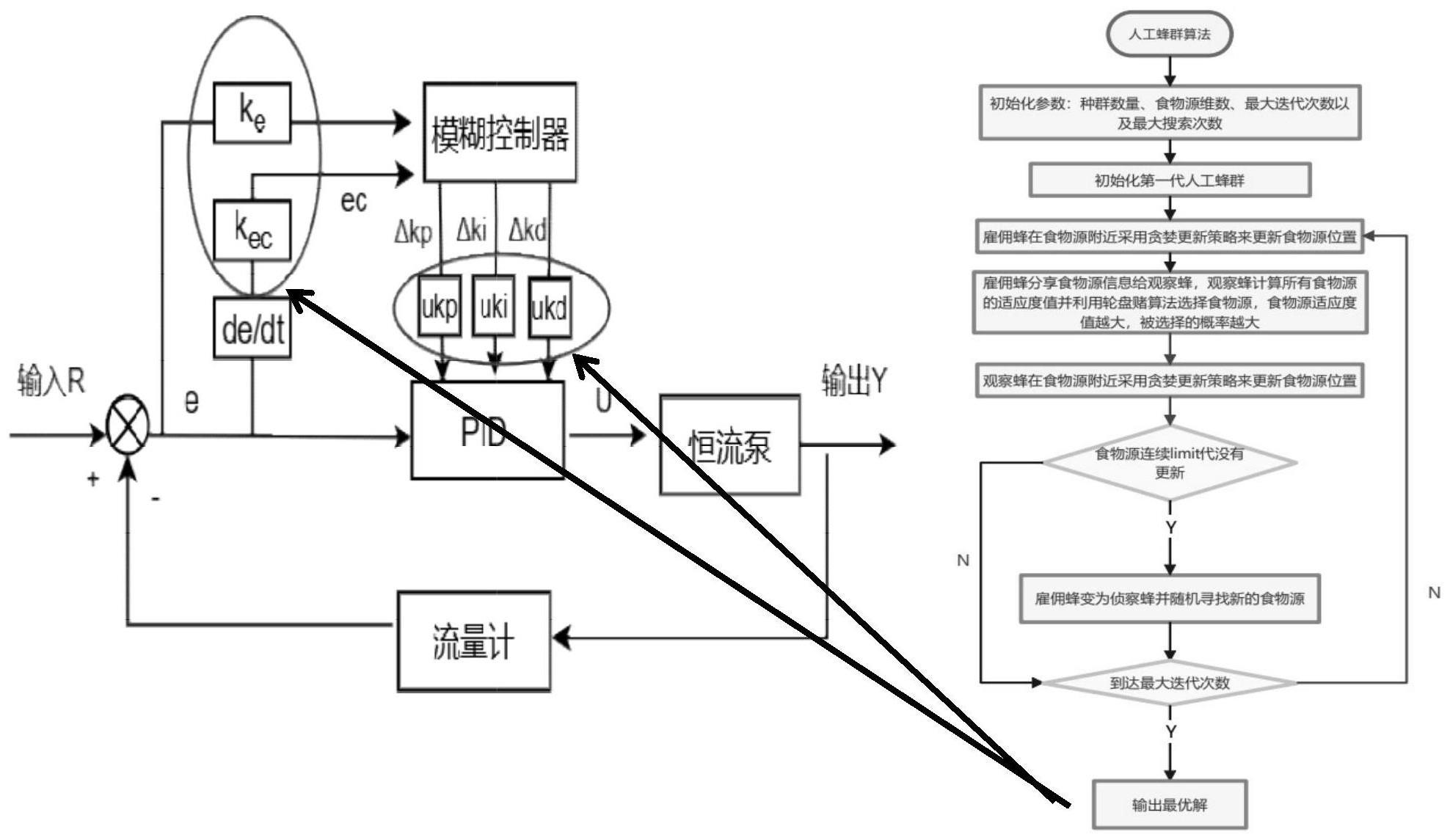
3、人工蜂群算法(artificial bee colony algorithm,简称abc)是一种基于模拟蜜蜂觅食行为的群体智能优化算法。abc算法通过模拟蜜蜂在采蜜过程中的行为,分为三种蜜蜂角色:工蜂、观察蜂和侦查蜂。其优化过程主要由三个阶段组成:初始化,搜索和局部搜索。其中,工蜂和观察蜂负责搜索蜜蜂养殖场(搜索空间)中的解,而侦查蜂则负责在搜索空间中的随机位置寻找新的解。abc算法主要适用于解决连续性优化问题,例如函数优化、参数寻优等。该算法的优点在于具有较高的收敛速度和全局寻优能力,在一些实际应用中也取得了较好的效果。
4、人工蜂群算法虽然具有良好的全局搜索性能和较快的收敛速度,但对于复杂的多模态问题,可能会出现收敛到局部最优解的情况。
技术实现思路
1、针对上述不足,本发明通过以下技术方案:
2、一种基于iabc优化模糊pid的恒流泵控制系统,其特征在于包括:基于iabc算法的模糊pid的参数优化算法以及模糊pid控制器,所述基于iabc算法的模糊pid的参数优算法化包括以下步骤:
3、步骤10:设置abc的参数,所述参数包括种群大小sn、最大迭代次数,maxit、最大评估次数mfe、个体维数d、阈值limit;
4、步骤20:生成初始种群,采用混沌映射公式如下:
5、xij=chebyshev(d)(1)
6、x(i)=cos(4acos(x(i-1))) (2)
7、每个解
8、其中和分别代表着第j维搜索空间的下界和上界。
9、chebyshev为混沌映射函数,(2)为其具体表达式。
10、步骤30:这边我们选取时间与绝对误差的积分(itae)作为适应函数,具体公式如(3),选取适应值较大的sn/2个个体作为初始雇佣蜂种群:
11、
12、其中,e(t)为系统误差。
13、步骤40、在由步骤30选择出来的雇佣蜂个体附近进行邻域搜索,得到新蜜源,搜索策略如公式(4)所示:
14、xij*=bestj+rv(xij*-xkj*) (4)
15、rv=αe-(it-0.1maxi)/(0.3maxit) (5)
16、j*=randperm(length(b),fix(c*d)+1); (6)
17、(4)中为随机选取种群中较好的个体,为自适应步长;为设定的参数值;it为当前执行的迭代次数,maxit为最大迭代次数,k为不等于i的数。j*为随机选取的多个参数的索引,b为所有参数的索引组成的数列,c为百分比,具体选择规则如下:
18、当迭代到在前40%时,随机选取前70%的参数更新,此时c=0.7。
19、当迭代到在前60%时,随机选取前50%的参数更新,此时c=0.5。
20、当迭代到在前80%时,随机选取前20%的参数更新,此时c=0.2。
21、当迭代到在前90%时,随机选取前10%的参数更新,此时c=0.1。
22、当迭代到在前100%时,随机选取前10%的参数更新,此时c=0。
23、步骤50、
24、按照公式(3)计算新蜜源中新个体的适应值,记作fit,若fiti<fit,采用新个体替换当前雇佣蜂个体,i=0:否则,进行随机搜索,当rand<pi时,按照公式(7)进行搜索,若rand>pi,i++,pi见公式(8):
25、vij=xij+rij(xij-xkj) (7)
26、
27、其中rand为0到1之间的随机数,k为不等于i的整数,r取值范围为[-1,1];步骤60、判断i>limit是否成立,若成立,则放弃当前蜜源,进入侦查蜂阶段,根据公式(8)生成新蜜源,若不成立,则当前的解为最优解,转至步骤70;步骤70、记录最优解;
28、步骤80、判断评估次数≥mfe,若是,则输出最优解;否则,转至步骤40。
29、模糊id控制器算法包括模糊控制规则和隶属度函数,通过模糊控制算法对pid控制器算法中的积分系数和微分系数进行整定,利用iabc对控制器比例因子智能寻优。具体的,选择输出流量偏差e与其导数ec作为模糊控制器的输入变量,经量化因子作用后输入模糊控制器得到模糊化变量e和ec。接着,给出转速偏差e、转速偏差变化率ec的模糊论域、模糊语言值,设置偏差e、偏差变化ec和控制量u的基本论域为[-3,3],并划分为7个等级,即{-3,-2,-1,0,1,2,3},模糊语言值(负大,负中,负小,零,正小,正中,正大],即{nb,nm,ns,o,ps,pm,pb),优选的,所用隶属度函数为三角隶属函数,分别为图3所示。
30、具体的,所述模糊控制规则如下所述:
31、通过结合e(n)以及ec(n)对(δkp,δki,δkd)进行反模糊化,再结合比例因子和pid初始值,整定可以得出n时刻比例、积分和微分系数,公式如下(1):
32、
33、kp0,ki0,kd0为pid初始值,ukp、uki、ukd为比例因子。恒流泵模型为num(s)/den(s)。
34、最终得到模糊pid控制器的输出信号如下式(2):
35、
36、本发明的有益效果是:(1)对于初始化种群采用混沌映射。混沌映射可以生成大量的随机数序列,这些序列具有高度的随机性和复杂性,可以保证种群中的初始解具有较大的多样性,有助于加速算法收敛速度和提高算法的全局搜索能力。
37、(2)变维度更新蜜源。由于对于食物源进行更新时每次只更新一个维度,严重影响了搜索的效率,这是人工蜂群算法收敛速度慢、精度差的主要原因。为了解决这一问题,本节提出了一种新的更新策略——变维度蜜源更新。在不同迭代范围采用不同维度的更新策略。采用这种梯度维度更新,平衡了算法的搜索和开发能力,在加快收敛速度的同时可以有效克服过早收敛的问题。
38、(3)以全局最优解为引导进行变范围邻域搜索。为了增加种群向优秀个体学习的概率,算法让蜜蜂始终围绕一些有着好的适应度值的食物源进行搜索,并且根据迭代次数改变搜索半径大小,加快对于更好的食物源寻找。
39、(4)以改良的abc为模糊pid所寻找到的解,能够使系统的稳定性和准确性有很大的提高,远优于有人工经验所设的值。。
- 还没有人留言评论。精彩留言会获得点赞!