晾杆移动行程控制方法、晾衣机以及晾衣系统与流程
本申请涉及智能晾衣机,具体而言,本申请涉及一种晾杆移动行程控制方法、晾衣机以及晾衣系统。
背景技术:
1、晾衣机是一种通过电动机产生驱动力的家居设备,可以由主机、动力系统、控制系统、升降系统、晾晒系统等组成,其可以为各类家庭用户提供智能自动化的晾衣、晾被等操作,晾衣机还可集无线射频遥控、led照明、光波智能杀菌等功能为一体,从而提升晾衣体验。
2、目前,晾衣机的晾杆行程控制一般是通过遥控器或者终端app,因此每次要进行晾晒操作时,都要另外找遥控器或者手机等移动终端,通过该移动终端调整晾杆的移动行程,而几乎每个家庭都体验过找不到遥控器或手机的情形,给晾晒操作带来一定的不方便。而且,用户有时处于手持需要晾晒的衣物以及其他难以解放双手的环境,基于遥控器或终端app的控制方式,也是需要特意放下解放双手后再去操作,操作效率低,便捷性差。
技术实现思路
1、本申请实施例提供了一种晾杆移动行程控制方法、晾衣机以及晾衣系统,可以解决每次晾晒时,需要使用移动终端实时调整晾杆的移动行程,操作繁琐,速度慢、效率低的问题。为了实现该目的,本申请实施例提供了如下几个方案。
2、根据本申请实施例的一个方面,提供了一种晾杆移动行程控制方法,包括:获取进入识别区域的目标对象的信息,根据所述信息确定所述目标对象的高度;若接收到预设信号,则根据所述高度确定晾杆进行移动的行程,所述预设信号包括晾衣信号、收衣信号、晾杆上升信号中的任一种。
3、在一个可能的实现方式中,所述获取进入识别区域的目标对象的信息,包括:
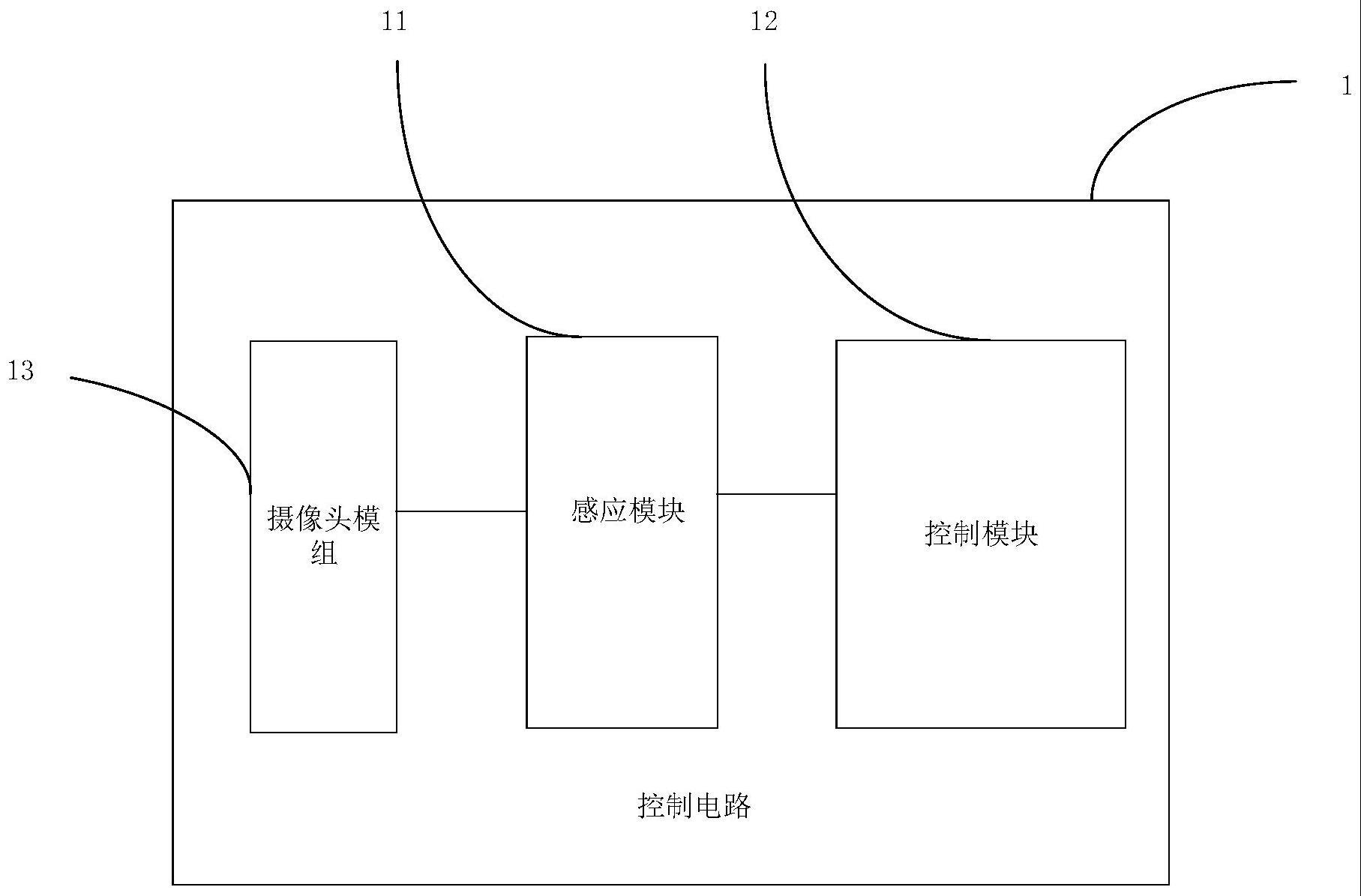
4、通过感应模块获取所述识别区域的检测信息;
5、若所述检测信息指示存在目标对象进入所述识别区域,则通过所述感应模块中的摄像头模组采集与所述目标对象相应的至少一帧图像。
6、在一个可能的实现方式中,所述高度包括身高,根据所述信息确定所述目标对象的高度,包括:
7、识别所述图像中的目标对象,根据识别结果确定所述目标对象的图像,基于所述目标对象的图像计算所述目标对象的身高;
8、或,根据所述图像获取所述目标对象的顶部与预设物体的距离,基于所述距离计算所述目标对象的身高,所述预设物体包括拍摄所述图像的摄像头。
9、在一个可能的实施方式中,所述若接收到预设信号,则根据所述高度确定晾杆进行移动的行程,包括以下至少一项:
10、根据所述图像识别所述目标对象的手势;若通过所述手势确定接收到预设信号,则根据所述手势、所述高度确定所述晾杆进行移动的行程;
11、采集所述目标对象的语音信息;若通过所述语音信息确定接收到预设信号,则根据所述语音信息、所述高度确定所述晾杆进行移动的行程;
12、接收外部设备传输的控制信号;若通过所述控制信号确定接收到预设信号,则根据所述控制信号、所述高度确定所述晾杆进行移动的行程,所述外部设备包括智能终端、遥控器、服务器、智能网关中的至少一种;
13、所述方法还包括:若确定接收到预设指令,则根据所述预设指令控制晾衣机工作,所述预设指令包括消毒、风干、烘干中的至少一种。
14、在一个可能的实现方式中,所述方法还包括:
15、若若接收到预设信号,则根据所述高度确定晾杆进行移动的行程,包括:
16、获取所述晾杆进行移动的行程,则控制模块的第一控制芯片向电机连接的电机驱动电路发送驱动信号,通过所述电机驱动电路驱动所述电机工作,以带动所述晾杆移动;
17、若确定接收到预设指令,根据所述预设指令控制晾衣机工作,包括:
18、所述控制模块的第一控制芯片根据所述预设指令向连接的第二控制芯片发送工作信号,所述第二控制芯片基于接收到的所述工作信号控制对应的模块或电路工作。
19、在一个可能的实现方式中,所述方法,还包括:
20、通过功能选择电路的光电开关得到功能选择信号;
21、若确定所述功能选择信号与所述晾杆的移动相关,则根据所述功能选择信号控制晾衣机工作,并获取进入识别区域的目标对象的信息;
22、若确定所述功能选择信息与所述晾杆的移动不相关,则根据所述功能选择信号控制所述晾衣机工作,不获取进入识别区域的目标对象的信息。
23、在一个可能的实现方式中,所述根据所述高度确定晾杆进行移动的行程,包括:
24、获取所述晾杆移动过程中限位检测信息,根据所述限位检测信息确定所述晾杆的上升终点或下降终点;
25、或,获取所述晾杆移动过程中的遇阻信息,若通过所述遇阻信息、所述高度调节所述晾杆移动的行程。
26、根据本申请实施例的另一个方面,提供一种晾衣机,包括:感应模块、晾杆以及与所述感应模块连接的控制模块,所述感应模块获取进入识别区域的目标对象的信息,将所述信息发送给控制模块;
27、所述控制模块通过所述信息确定目标对象的高度,若接收到预设信号,根据所述高度确定晾杆进行移动的行程,所述预设信号包括晾衣信号、收衣信号、晾杆上升信号中的任一种。
28、在一个可能的实现方式中,所述晾衣机还包括主机、摄像头模组,所述感应模块与所述摄像头模组连接以获取进入识别区域的目标对象的信息,所述摄像头模组固定在所述主机的端部和/或侧面,且所述摄像头模组的图像采集端相对于所述识别区域所在平面倾斜设置。
29、根据本申请实施例的再一个方面,提供了一种晾衣系统,包括通信连接的晾衣机、控制终端,所述控制终端用于向所述晾衣机发送预设信号,所述控制终端包括遥控器、智能终端、云平台中的至少一种;
30、所述晾衣机用于根据所述控制信号工作和执行如上所述的晾杆移动行程控制方法。
31、本申请实施例提供的技术方案带来的有益效果是:
32、在本申请提供的晾杆移动行程控制方法获取进入识别区域的目标对象的信息,根据该信息确定目标对象的高度,在接收到预设信号后,根据该目标对象的高度确定晾杆进行移动的行程。本申请实施例通过进入识别区域的目标对象的信息得到目标对象的高度,并在接收到预设信号后,根据该高度确定晾杆移动的行程。因此,本申请实施例能够获取目标对象的高度,并在需要使用晾杆时,根据该高度确定晾杆进行移动的行程,无需另外使用移动终端调整晾杆的移动行程,提升了晾衣机的智能化程度、晾晒效率以及晾衣对象的使用体验。
技术特征:
1.一种晾杆移动行程控制方法,其特征在于,包括:
2.根据权利要求1所述的方法,其特征在于,所述获取进入识别区域的目标对象的信息,包括:
3.根据权利要求2所述的方法,其特征在于,所述高度包括身高,根据所述信息确定所述目标对象的高度,包括:
4.根据权利要求2所述的方法,其特征在于,所述若接收到预设信号,则根据所述高度确定晾杆进行移动的行程,包括以下至少一项:
5.根据权利要求4所述的方法,其特征在于,所述方法还包括:
6.根据权利要求2所述的方法,其特征在于,所述方法,还包括:
7.根据权利要求1所述的方法,其特征在于,所述根据所述高度确定晾杆进行移动的行程,包括:
8.一种晾衣机,其特征在于,包括:感应模块、晾杆以及与所述感应模块连接的控制模块,所述感应模块获取进入识别区域的目标对象的信息,将所述信息发送给控制模块;
9.根据权利要求8所述的晾衣机,其特征在于,所述晾衣机还包括主机、摄像头模组,所述感应模块与所述摄像头模组连接以获取进入识别区域的目标对象的图像,所述摄像头模组固定在所述主机的端部和/或侧面,且所述摄像头模组的图像采集端相对于所述识别区域所在平面倾斜设置。
10.一种晾衣系统,其特征在于,包括通信连接的晾衣机、控制终端,所述控制终端用于向所述晾衣机发送预设信号,所述控制终端包括遥控器、智能终端、云平台中的至少一种;
技术总结
本申请提供了一种晾杆移动行程控制方法、晾衣机以及晾衣系统,涉及智能晾衣机技术领域。该晾衣机包括:获取进入识别区域的目标对象的信息,根据信息确定目标对象的高度;若接收到预设信号,则根据高度确定晾杆进行移动的行程。本申请的实施能够获取目标对象的高度,并在需要使用晾杆时,根据该高度确定晾杆进行移动的行程,无需另外使用移动终端调整晾杆的移动行程,提升了晾衣机的智能化程度、晾晒效率以及晾衣对象的使用体验。
技术研发人员:王妙玉,范子杰,周亮,吴宁泉,陈南生
受保护的技术使用者:广东好太太科技集团股份有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!