一种定线制水域船舶自主航行决策方法及装置
本发明涉及定线制水域船舶自主航行,具体涉及一种定线制水域船舶自主航行决策方法及装置。
背景技术:
1、随着贸易全球化的不断发展,全球货物运输需求激增。据统计,航运业承担了90%以上的全球货物运输任务。船舶大型化、快速化趋势日趋明显,船舶数量增加,交通环境日益复杂,人为因素导致的航行安全问题突出。在自主船舶出现之前,为解决船舶汇聚水域交通秩序混乱、事故多发的问题,各国在这类水域设置船舶定线制。以推荐或其他的形式规定航路方向,简化交通流形式,约束船舶行为,减少碰撞、搁浅等事故的发生。船舶定线制的出现很大程度上缓解了通航压力,维护了交通秩序,减少船舶航行风险。但商船体型、惯性大、机动性差和操纵迟滞明显,在环境约束较强的定线制水域操纵难度较大。与此同时,船舶交通流日益增多,部分定线制种类多、会遇场景繁多,致使碰撞、搁浅等事故仍时有发生。
2、在计算机技术飞速发展的今天,提高船舶智能化、自主化程度,实现自主航行,是缓解定线制水域船舶航行安全问题的有效途径,也能减少人类财产和生命损失,这对提高航运效率具有重要理论与实际意义。未来,在自主航行出现后的一定时间内,水上交通环境将会是自主船舶与传统有人船舶共同参与。但是,在自主船舶与传统有人船舶共同参与的情况下,难免会有人机冲突产生不协调避碰行动。
3、因此,急需提出一种定线制水域船舶自主航行决策方法及装置,解决现有技术中自主船舶与传统有人船舶共同参与的情况下,在船舶在定线制水域产生人机冲突,导致产生不协调避碰行动的技术问题。
技术实现思路
1、有鉴于此,有必要提供一种定线制水域船舶自主航行决策方法及装置,用以解决现有技术中自主船舶与传统有人船舶共同参与的情况下,在船舶在定线制水域产生人机冲突,导致产生不协调避碰行动的技术问题。
2、一方面,本发明提供了一种定线制水域船舶自主航行决策方法,包括:
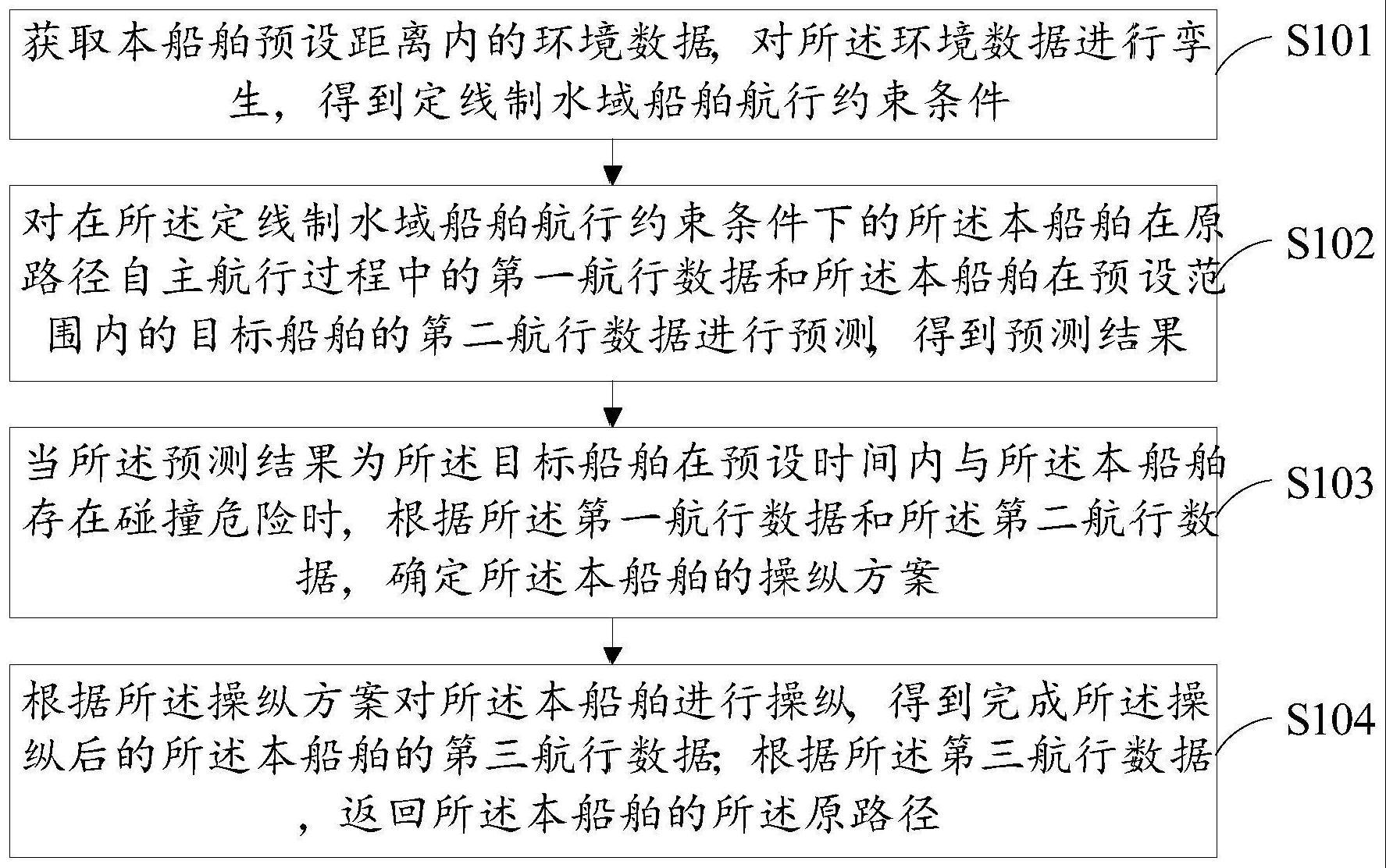
3、获取本船舶预设距离内的环境数据,对所述环境数据进行孪生,得到定线制水域船舶航行约束条件;
4、对在所述定线制水域船舶航行约束条件下的所述本船舶在原路径自主航行过程中的第一航行数据和所述本船舶在预设范围内的目标船舶的第二航行数据进行预测,得到预测结果;
5、当所述预测结果为所述目标船舶在预设时间内与所述本船舶存在碰撞危险时,根据所述第一航行数据和所述第二航行数据,确定所述本船舶的操纵方案;
6、根据所述操纵方案对所述本船舶进行操纵,得到完成所述操纵后的所述本船舶的第三航行数据;根据所述第三航行数据,返回所述本船舶的所述原路径。
7、在一些可能的实现方式中,所述环境数据包括静态环境数据和动态环境数据;
8、所述获取本船舶预设距离内的环境数据,对所述环境数据进行孪生,得到定线制水域船舶航行约束条件,包括:
9、根据所述静态环境数据和船舶定线制,建立整体模型和静态交通环境要素模型;
10、根据所述动态环境数据,建立动态交通环境要素数学模型;
11、根据所述整体模型、所述静态交通环境要素模型和所述动态交通环境要素数学模型对所述环境数据进行数字孪生,得到定线制水域船舶航行约束条件。
12、在一些可能的实现方式中,所述第一航行数据包括所述本船舶的船舶操纵性,所述预测结果包括存在碰撞危险或不存在碰撞危险;
13、所述对在所述定线制水域船舶航行约束条件下的所述本船舶在原路径自主航行过程中的第一航行数据和所述本船舶在预设范围内的目标船舶的第二航行数据进行预测,得到预测结果,包括:
14、根据所述本船舶的所述船舶操纵性和所述环境数据,确定所述本船舶在所述定线制水域船舶航行约束条件下的船舶领域;
15、根据定线制水域自主航行系统对所述本船舶和所述本船舶预设范围内的所述目标船舶进行监控,得到所述本船舶和所述目标船舶的监控数据;
16、根据所述监控数据,预测出预设时间内所述本船舶的预设个数第一船位和所述目标船舶的预设个数第二船位;
17、当所述预设个数第二船位中存在至少一个第二船位在所述本船舶的任意一个第一船位的所述船舶领域中时,确定所述本船舶与所述目标船舶存在碰撞危险;
18、当所述预设个数第二船位均不在所述本船舶的所述预设个数第一船位的所述船舶领域中时,确定所述本船舶与所述目标船舶不存在碰撞危险。
19、在一些可能的实现方式中,所述当所述预测结果为所述目标船舶在预设时间内与所述本船舶存在碰撞危险时,根据所述第一航行数据和所述第二航行数据,确定所述定线制水域本船舶的操纵方案,包括:
20、根据所述本船舶的所述预设个数第一船位、所述船舶领域和所述目标船舶的所述预设个数第二船位,确定所述本船舶与所述目标船舶的碰撞危险度;
21、根据所述本船舶的所述第一航行数据,确定所述本船舶的第一船舶类型;
22、根据所述目标船舶的所述第二航行数据,确定所述目标船舶的第二船舶类型;
23、根据所述碰撞危险度、所述第一船舶类型和所述第二船舶类型,确定所述本船舶的定线制水域操纵方案。
24、在一些可能的实现方式中,所述根据所述本船舶的所述预设个数第一船位、所述船舶领域和所述目标船舶的所述预设个数第二船位,确定所述本船舶与所述目标船舶的碰撞危险度,包括:
25、根据所述本船舶的所述船舶领域和所述目标船舶的所述预设个数第二船位,确定空间碰撞危险度;
26、根据所述本船舶的所述预设个数第一船位、所述船舶领域和所述目标船舶的所述预设个数第二船位,确定至少一个所述第二船位进入所述本船舶的任意一个所述第一船位的所述船舶领域的航行时间;
27、根据所述航行时间,确定时间碰撞危险度;
28、根据所述空间碰撞危险度和所述定时间碰撞危险度,确定所述本船舶与所述目标船舶的碰撞危险度。
29、在一些可能的实现方式中,所述第一船舶类型包括直航船舶、让路船舶,所述第二船舶类型包括所述直航船舶、所述让路船舶和特殊船舶;
30、所述根据所述碰撞危险度、所述第一船舶类型和所述第二船舶类型,确定所述本船舶的操纵方案,包括:
31、当所述本船舶为所述让路船舶、所述目标船舶为所述直航船舶时,确定所述本船舶的第一操纵方案;
32、当所述本船舶为所述直航船舶、所述目标船舶为所述让路船舶时,在所述碰撞危险度大于等于碰撞阈值的情况下,确定所述本船舶的第二操纵方案;
33、当所述目标船舶为特殊船舶时,确定所述本船舶的第三操纵方案;
34、当所述本船舶与所述目标船舶对遇时,确定所述本船舶的第四操纵方案。
35、在一些可能的实现方式中,所述根据所述操纵方案对所述本船舶进行操纵,得到完成所述操纵后的所述本船舶的第三航行数据,包括:
36、根据所述操纵方案对所述本船舶进行操纵,得到完成所述操纵后所述本船舶的第三船位;
37、根据所述整体模型与所述第三船位,确定所述本船舶的第三航行数据。
38、在一些可能的实现方式中,所述第三航行数据包括所述第三船位与所述整体模型中航道边界的距离;
39、所述根据所述第三航行数据,返回所述本船舶的所述原路径,包括:
40、判断所述距离是否大于等于边界阈值;
41、若是,则确定所述本船舶的第五操纵方案,根据所述第五操纵方案对所述本船舶进行操纵,以使所述本船舶返回所述原路径继续行驶。
42、在一些可能的实现方式中,所述判断所述距离是否大于等于边界阈值之后,还包括:
43、若所述距离小于所述边界阈值,则所述本船舶在所述定线制水域船舶航行约束条件下,沿所述整体模型的所述航道边界的边界航行;
44、根据所述本船舶的航行情况,更新所述本船舶的第三船位,并重新进行“判断所述距离是否大于等于边界阈值”的步骤。
45、另一方面,本发明还提供了一种定线制水域船舶自主航行决策装置,包括:
46、数据获取模块,用于获取本船舶预设距离内的环境数据,对所述环境数据进行孪生,得到定线制水域船舶航行约束条件;
47、数据预测模块,用于对在所述定线制水域船舶航行约束条件下的所述本船舶在原路径自主航行过程中的第一航行数据和所述本船舶在预设范围内的目标船舶的第二航行数据进行预测,得到预测结果;
48、方案确定模块,用于当所述预测结果为所述目标船舶在预设时间内与所述本船舶存在碰撞危险时,根据所述第一航行数据和所述第二航行数据,确定所述本船舶的操纵方案;
49、船舶操纵模块,用于根据所述操纵方案对所述本船舶进行操纵,得到完成所述操纵后的所述本船舶的第三航行数据;根据所述第三航行数据,返回所述本船舶的所述原路径。
50、采用上述实施例的有益效果是:本发明提供的定线制水域船舶自主航行决策方法,获取本船舶预设距离内的环境数据,对环境数据进行孪生,得到所述船舶航行约束条件;对船舶在定线制水域船舶航行约束条件下的本船舶在原路径自主航行过程中的第一航行数据和本船舶在预设范围内的目标船舶的第二航行数据进行预测,得到预测结果;当预测结果为目标船舶在预设时间内与本船舶存在碰撞危险时,根据第一航行数据和第二航行数据,确定本船舶的操纵方案;根据操纵方案对本船舶进行操纵,得到完成操纵后的本船舶的第三航行数据;根据第三航行数据,返回本船舶的原路径。本发明通过对环境数据进行孪生,对近岸复杂水域中的本船舶的航行进行约束,保证本船舶在航行过程中的安全。进一步的,通过对本船舶预设范围内的其他目标船舶进行监控,预测与本船舶是否会发送碰撞,如果是,则根据操纵方案对本船舶进行操纵,完成碰撞操纵,避免了人机冲突,提高本船舶在航行过程中的安全性,实现了本船舶在定线制水域的复杂水域中的自主航行。
- 还没有人留言评论。精彩留言会获得点赞!