一种局部路径规划方法、设备及存储介质与流程
本发明属于自动驾驶路径规划领域,尤其涉及一种基于激光雷达感知和三阶贝塞尔曲线的局部路径规划方法、设备及存储介质。
背景技术:
1、局部路径规划是自动驾驶技术中不可或缺的关键环节之一,局部路径规划是在全局路径的基础上,由于对环境信息完全未知或者局部可知,从而通过传感器确定周边障碍物信息,规划一条绕开障碍物的轨迹以达到避障功能。
2、目前量产的自动驾驶一般基于城市、高速等场景,常采用高精度地图生成结构化道路,根据融合感知结果及轨迹预测,采用换道策略进行绕障规划。该方法对无结构化道路、点对点的封闭半封闭场景不具备适用性。
3、基于此,针对上述问题,提供了一种基于激光雷达感知和三阶贝塞尔曲线的局部路径规划算法。该方法根据激光雷达感知结果,在全局路径上进行节点调节,并采用三阶贝塞尔曲线进行曲线拟合,并在路径上进行碰撞检测和曲率筛查,生成一条绕开障碍物的可行驶的局部轨迹。
技术实现思路
1、本专利要解决的问题是提供一种在无结构化道路、点对点的封闭半封闭场景下生成绕开障碍物的局部路径规划方法。
2、为解决上述问题,本发明采用了如下技术方案:
3、一种局部路径规划方法,包括步骤:
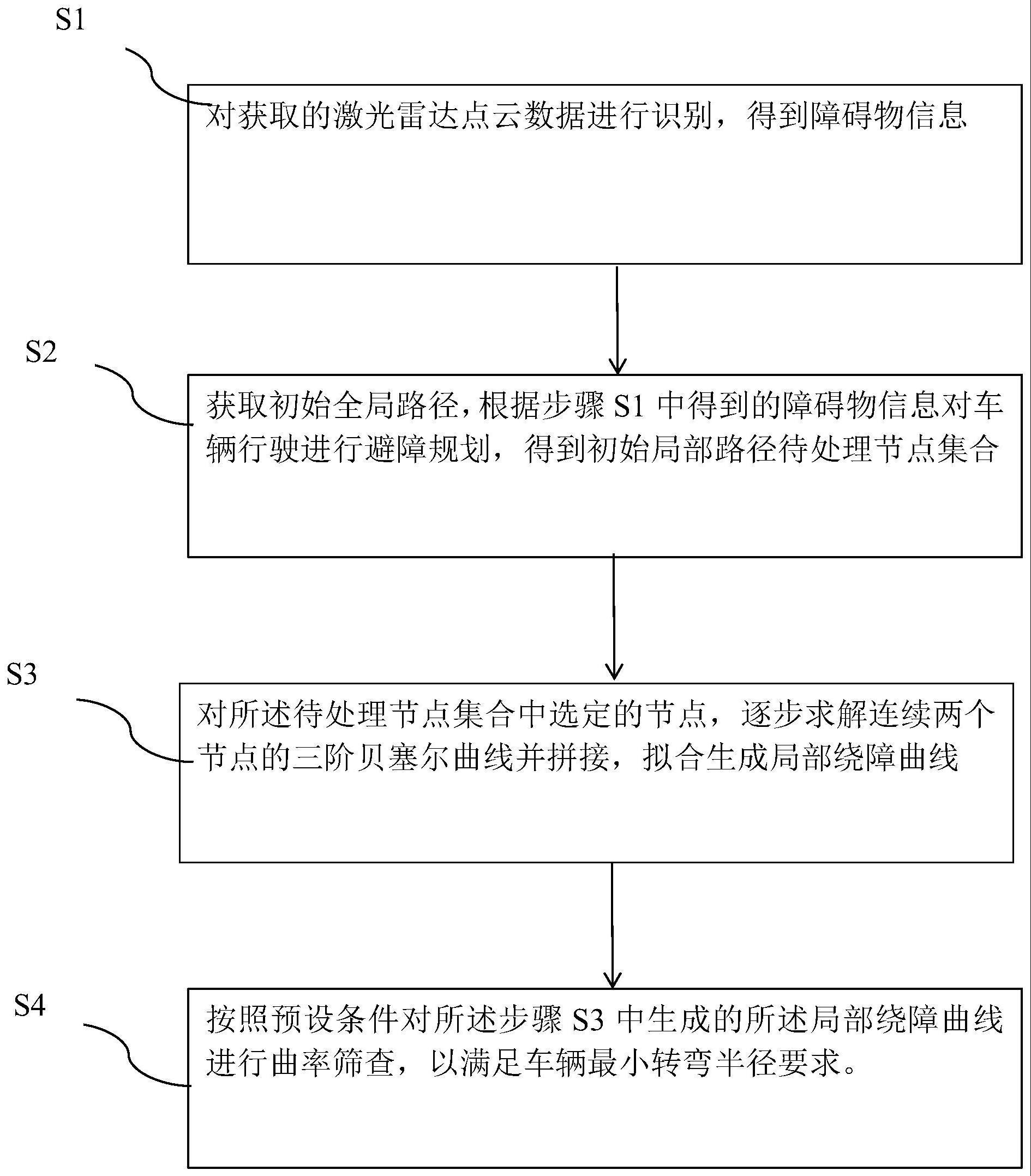
4、s1:对获取的激光雷达点云数据进行识别,得到障碍物信息;
5、s2:获取初始全局路径,根据障碍物信息对车辆进行避障规划,并对选定节点进行一定距离的偏置处理,以保证偏置之后不与障碍物碰撞,得到局部路径的待处理节点集合;
6、s3:对待处理节点集合中选定的节点,逐步求解连续两个节点的三阶贝塞尔曲线并拼接,拟合生成局部绕障曲线;
7、s4:按照预设条件对步骤s3中生成的局部绕障曲线进行曲率筛查,以满足车辆最小转弯半径要求。
8、进一步的,步骤s1中对激光雷达点云数据进行识别的步骤包括:
9、s11:提取横纵向规定范围内激光点云;
10、s12:对步骤s11中提取的点云进行直通滤波;
11、s13:对步骤s12中直通滤波后的滤波点云采用降采样滤波;
12、s14:对步骤s13降采样滤波后的滤波点云进行去地面处理;
13、s15:对步骤s14中去地面处理后的点云左右采用欧式聚类。
14、进一步的,步骤s2中避障规划步骤包括:
15、s21:根据第一约束条件查询起始规划节点和终止规划节点;
16、s22:根据第二约束条件筛选起始规划节点与终止规划节点间与车辆发生碰撞的危险障碍物集合;
17、s23:对危险障碍物集合中的每一个危险障碍物,求每一个危险障碍物轮廓点与所述全局路径临近点的索引,得到危险路径节点集合;
18、s24:对步骤s23中得到危险路径节点集合中的节点进行横向偏移避障,偏移后得到的节点为待处理节点集合。
19、进一步的,步骤s3中三阶贝塞尔曲线路径求解步骤包括:
20、s31:确定控制点坐标;
21、s32:求解曲线弧长;
22、s31:求解曲线中任意点的坐标,航向,曲率。
23、进一步的,步骤s21中第一约束条件包括:
24、设置起始规划距离、终止规划距离、冗余距离;对起始规划节点和重点规划节点进行查询,查询要求包括:
25、第一要求,车辆当前位置的全局路径临近点到起始规划节点的路径弧长大于冗余距离+起始规划距离,且从临近点-起始终止节点之间,车辆行驶过程中不会与任何障碍物发生碰撞;
26、第二要求,车辆当前位置的全局路径临近点到终止规划节点的路径弧长大于冗余距离+终止规划距离,且路径上从终止规划节点到全局路径终点段,车辆按轨迹行走不会与任何障碍物发生碰撞。
27、进一步的,步骤s22中第二约束条件包括:
28、对步骤s21中查询到的起始规划节点和终止规划节点间的障碍物进行轮询,对起始规划节点和终止规划节点间的节点,逐点将车辆轮廓投影,如障碍物与车辆轮廓发生碰撞,则记录该障碍物为危险障碍物,筛选所有障碍物得到危险障碍物集合。
29、进一步的,步骤s24中横向偏移避障为向第一方向或向第二方向偏移,第一方向为第二方向的相对方向,具体步骤包括:
30、s241:设置单次偏移距离及最大偏移距离;
31、s242:对危险路径节点集合中的节点在第一方向逐次偏移单次偏移距离,直至满足避障要求,且累计偏移距离不大于最大偏移距离,则记录偏移后的节点为一个待处理节点;
32、s243:如步骤242中的节点在第一方向上避障失败,则对该节点向第二方向进行逐次偏移单次偏移距离,直至满足避障要求,且累计偏移距离不大于最大偏移距离,则记录偏移后的节点为一个待处理节点;
33、s244:对危险危险路径集合中所有节点执行s242步骤与243步骤,得到节点的集合记录为待处理节点集合。
34、本发明还提供了一种局部路径规划规划设备,包括存储模块,存储模块存储有可执行指令,可执行指令可实现上述局部路径规划方法。
35、进一步的,该设备还包括采集模块、通讯模块、处理模块。
36、本发明还提供了一种存储介质,存储有实现上述局部路径规划方法的程序。
37、本发明针对无结构化道路、点对点的封闭半封闭场景采用激光雷达点云数据得到障碍物信息,对障碍物信息进行识别及处理,得到信息准确的路线,提高了无人驾驶的准确性和安全性。
技术特征:
1.一种局部路径规划方法,其特征在于,包括步骤:
2.根据权利要求1所述的一种局部路径规划方法,其特征在于:所述步骤s1中对所述激光雷达点云数据进行识别的步骤包括:
3.根据权利要求1所述的一种局部路径规划方法,其特征在于,所述步骤s2中避障规划步骤包括:
4.根据权利要求1中所述的一种局部路径规划方法,其特征在于,所述步骤s3中三阶贝塞尔曲线路径求解步骤包括:
5.根据权利要求3所述的一种局部路径规划方法,其特征在于,所述步骤s21中第一约束条件包括:
6.根据权利要求3所述的一种局部路径规划方法,其特征在于,所述步骤s22中所述第二约束条件包括:
7.根据权利要求3所述的一种局部路径规划方法,其特征在于,
8.一种局部路径规划设备,其特征在于:包括存储模块,所述存储模块中存储有可执行指令,所述可执行指令可实现权利1-7中任一项的方法。
9.根据权利要求8中所述的一种局部路径规划规划设备,其特征在于:还包括采集模块、通讯模块、处理模块。
10.一种存储介质,其特征在于:所述存储介质存储有实现权利要求1-7中任一项方法的程序。
技术总结
本发明提供了一种在无结构化道路、点对点的封闭半封闭场景下生成绕开障碍物的局部路径规划方法、设备及存储介质。本发明采用了如下技术方案:一种局部路径规划方法,包括步骤:S1:对获取的激光雷达点云数据进行识别,得到障碍物信息;S2:获取初始全局路径,根据障碍物信息对车辆进行避障规划,并对选定节点进行一定距离的偏置处理,以保证偏置之后不与障碍物碰撞,得到局部路径的待处理节点集合;S3:对待处理节点集合,逐步求解其中连续两个节点的三阶贝塞尔曲线并拼接,拟合生成局部绕障曲线;S4:按照预设条件对所述步骤S3中生成的所述局部绕障曲线进行曲率筛查,以满足车辆最小转弯半径要求。
技术研发人员:张庶,马宏,段桂江
受保护的技术使用者:易显智能科技有限责任公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!