一种基于伪谱法的高超声速飞行器双层轨迹规划方法
本发明涉及高超声速飞行器轨迹规划,尤其涉及一种基于伪谱法的高超声速飞行器双层轨迹规划方法。
背景技术:
1、高超声速飞行器在飞行过程中,由于某些因素、探测防空部署等问题。划定区域不可在上空飞行,必须通过绕飞的方式规避。高超声速飞行器飞行速度快,反应时间短,一旦禁飞区部署情况改变,剩余轨迹窗口窄。因此需要快速的轨迹规划提升飞行器规避效率。
2、高超声速飞行器轨迹规划通常作为非线性规划问题求解。高超声速飞行器飞行距离远、飞行过程约束复杂、飞行速度快,在此背景下,传统方法难快速有效的规划出最优路径。
3、因此如何在复杂过程约束的条件下,提供一种提高高超声速飞行器轨迹规划精确性和快速性的高超声速飞行器轨迹规划方法,是本领域技术人员重点关注的技术问题。
技术实现思路
1、本发明目的是提供了一种基于伪谱法的高超声速飞行器双层轨迹规划方法,以解决上述问题。
2、本发明解决技术问题采用如下技术方案:
3、一种基于伪谱法的高超声速飞行器双层轨迹规划方法,包括如下步骤:
4、定义节点,节点包含起始点、目标点和禁飞区切点;
5、节点扩展,若该节点为起始点,则其子节点为所有禁飞区切点和目标点,若该节点为某禁飞区的切点时,则其子节点为其他禁飞区切点和目标点;
6、节点选择,选择价值最小的待扩展的节点,此节点成为正在扩展的节点;
7、标准形式建立,依据节点选择结果,建立最优控制问题的标准形式;
8、求解规划,采用hp-radau伪谱法自适应调整离散精度,并对非线性规划问题求解完成轨迹规划。
9、进一步地,所述起始点属性包括:起始点坐标、起始点和航向,目标点属性包括:目标点坐标、目标点和航向,禁飞区切点属性包括:禁飞区横纵坐标、禁飞区半径、禁飞区绕飞方向和航向。
10、进一步地,所述节点选择步骤若选择的节点为非目标节点,则执行如下步骤:
11、节点分析:选择正在扩展的节点,并找出所有可扩展子节点,并依次对子节点进行分析;
12、步骤选择,判断子节点是否分析完毕,如果存在未分析过的子节点则执行节点判定步骤,否则返回执行节点选择步骤;
13、节点判定1,选择未分析过的子节点,根据父子节点顺逆飞行方向生成dubins曲线,若此dubins曲线经过其他禁飞区,则在可扩展子节点中删除,并返回步骤选择步骤,否则执行节点判定2步骤;
14、节点判定2、判断子节点是否已被扩展,如果该节点被扩展过,则说明存在更短的路径到达该子节点,因此放弃这一子节点,回到节点判定步骤,否则继续执行节点判定3步骤。
15、节点判定3,计算dubins曲线长度,并给出子节点的代价gs,dubins曲线长度为扩展这一子节点的代价△g,子节点的代价gs,为父节点的代价gf与△g的和;
16、节点判定4,判断子节点是否为待扩展节点,如果该子节点是待扩展节点,说明有其他路径可到达该子节点,比较两路径的长度代价,保留较短的一条路径,否则保存该子节点为待扩展节点并返回节点分析步骤。
17、进一步地,所述标准形式建立具体步骤包括:
18、依据路径决策结果,建立最优控制问题的标准形式.
19、最优控制标准形式包括:性能指标、微分方程约束、边界约束、路径约束。
20、其中所有标准形式变换为以横坐标为自变量的形式。
21、其中禁飞区约束属于路径约束,将禁飞区约束进行严格化,限制从禁飞区绕飞的方向,从非凸约束转化为凸约束。
22、进一步地,所述求解规划具体步骤包括:
23、伪谱法离散最优控制为非线性规划问题,配点在横坐标上定义域离散而非时域,
24、采用hp-radau伪谱法自适应调整离散精度,对非线性规划问题求解,若不满足精度要求则重复求解规划步骤,直至满足精度要求即规划完成。
25、进一步地,根据父子节点的飞行方向生成dubins曲线的方法包括:
26、根据父子节点的坐标和航向,确定两个圆心和半径,分别为左转圆和右转圆;
27、如果父子节点的飞行方向均为顺时针,则从父节点所在的右转圆出发,沿右转圆弧飞行到与子节点所在的右转圆相切的直线上,再沿直线飞行到子节点;
28、如果父子节点的飞行方向均为逆时针,则从父节点所在的左转圆出发,沿左转圆弧飞行到与子节点所在的左转圆相切的直线上,再沿直线飞行到子节点;
29、如果父节点的飞行方向为顺时针,子节点的飞行方向为逆时针,则从父节点所在的右转圆出发,沿右转圆弧飞行到与子节点所在的左转圆相切的直线上,再沿直线飞行到子节点;
30、如果父节点的飞行方向为逆时针,子节点的飞行方向为顺时针,则从父节点所在的左转圆出发,沿左转圆弧飞行到与子节点所在的右转圆相切的直线上,再沿直线飞行到子节点;
31、进一步地,所述hp-radau伪谱法将最优控制问题离散化为非线性规划问题的方法包括:将横坐标定义域划分为多个区间,并在每个区间内选取radau配点;将状态变量和控制变量在每个配点处用多项式插值近似,并用legendre-gauss-radau积分公式计算性能指标;用微分矩阵近似状态方程,并用边界条件和路径约束构造非线性规划问题。
32、一种基于伪谱法的高超声速飞行器双层轨迹规划系统,其特征在于,所述系统包括:
33、定义节点模块,用于将节点定义为起始点、目标点和禁飞区切点;若该节点为起始点,则其子节点为所有禁飞区切点和目标点,若该节点为某禁飞区的切点时,则其子节点为其他禁飞区切点和目标点;
34、节点选择模块,用于选择价值最小的待扩展的节点,此节点成为正在扩展的节点;
35、标准形式建立模块,用于依据节点选择结果,建立最优控制问题的标准形式;
36、求解规划模块,用于采用hp-radau伪谱法自适应调整离散精度,并对非线性规划问题求解完成轨迹规划。
37、一种可读存储介质,所述存储介质内存储有一种基于伪谱法的高超声速飞行器双层轨迹规划方法和\软件程序,所述软件程序内包括用于执行一种基于伪谱法的高超声速飞行器双层轨迹规划方法的软件代码。
38、一种电子装置,包括存储器和处理器,所述存储器中存储有计算机程序,所述处理器被设置为运行所述计算机程序以执行一种基于伪谱法的高超声速飞行器双层轨迹规划方法。
39、有益效果:
40、本发明公开提供了一种基于伪谱法的高超声速飞行器双层轨迹规划方法,基于dubins曲线和a*算法对绕飞禁飞区的方向进行决策;依据绕飞方向和以横坐标为自变量的离散方式,使禁飞区约束凸化,降低轨迹优化复杂度,从而实现在禁飞区约束下快速轨迹规划。
技术特征:
1.一种基于伪谱法的高超声速飞行器双层轨迹规划方法,其特征在于,包括如下步骤:
2.根据权利要求1所述的一种基于伪谱法的高超声速飞行器双层轨迹规划方法,其特征在于,所述起始点属性包括:起始点坐标、起始点和航向,目标点属性包括:目标点坐标、目标点和航向,禁飞区切点属性包括:禁飞区横纵坐标、禁飞区半径、禁飞区绕飞方向和航向。
3.根据权利要求1所述的一种基于伪谱法的高超声速飞行器双层轨迹规划方法,其特征在于,所述节点选择步骤若选择的节点为非目标节点,则执行如下步骤:
4.根据权利要求1所述的一种基于伪谱法的高超声速飞行器双层轨迹规划方法,其特征在于,所述标准形式建立具体步骤包括:
5.根据权利要求1所述的一种基于伪谱法的高超声速飞行器双层轨迹规划方法,其特征在于,所述求解规划具体步骤包括:
6.根据权利要求3所述的一种基于伪谱法的高超声速飞行器双层轨迹规划方法,其特征在于,根据父子节点的飞行方向生成dubins曲线的方法包括:
7.根据权利要求2所述的一种基于伪谱法的高超声速飞行器双层轨迹规划方法,其特征在于,所述hp-radau伪谱法将最优控制问题离散化为非线性规划问题的方法包括:将横坐标定义域划分为多个区间,并在每个区间内选取radau配点;将状态变量和控制变量在每个配点处用多项式插值近似,并用legendre-gauss-radau积分公式计算性能指标;用微分矩阵近似状态方程,并用边界条件和路径约束构造非线性规划问题。
8.一种基于伪谱法的高超声速飞行器双层轨迹规划系统,其特征在于,所述系统包括:
9.一种可读存储介质,其特征在于,所述存储介质内存储有权利要求1-7之一所述的一种基于伪谱法的高超声速飞行器双层轨迹规划方法和\软件程序,所述软件程序内包括用于执行权利要求1-7之一所述的一种基于伪谱法的高超声速飞行器双层轨迹规划方法的软件代码。
10.一种电子装置,包括存储器和处理器,其特征在于,所述存储器中存储有计算机程序,所述处理器被设置为运行所述计算机程序以执行权利要求1至7任一所述的一种基于伪谱法的高超声速飞行器双层轨迹规划方法。
技术总结
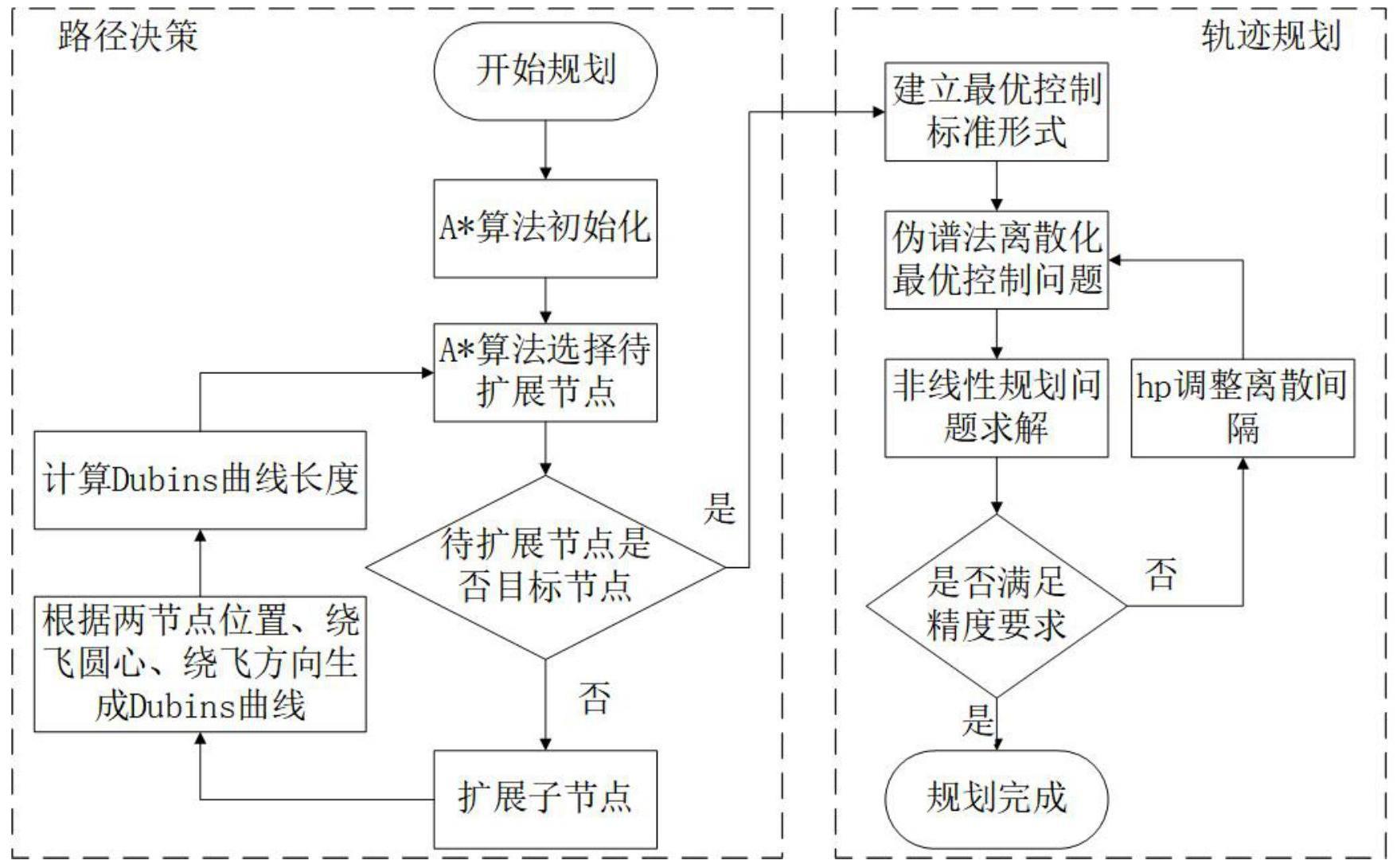
本发明公开了一种基于伪谱法的高超声速飞行器双层轨迹规划方法,属于高超声速飞行器轨迹规划技术领域,包括初始化A*算法的Open表、Close表;根据A*算法选择价值最小的待扩展的节点;判断待扩展节点是否目标节点,从目标节点回溯得到路径决策结果;对于非目标节点,扩展其子节点;根据父子节点顺逆飞行方向生成Dubins曲线;计算Dubins曲线长度,评价扩展节点的代价;依据路径决策结果,建立最优控制问题的标准形式;伪谱法离散最优控制为非线性规划问题,并对非线性规划问题求解;采用hp‑Radau伪谱法自适应调整离散精度,获得满足精度要求的轨迹。本发明提高了高超声速飞行器轨迹规划的精确性与快速性,为飞行器安全飞行提供了有力支持。
技术研发人员:高伯伦,姚贻帝,崔朗福,张庆振,白成刚,缑欣怡,谷晓彤,王明贤
受保护的技术使用者:北京航空航天大学
技术研发日:
技术公布日:2024/1/16
- 还没有人留言评论。精彩留言会获得点赞!