一种无人驾驶环卫车的实时路径规划方法及装置与流程
本申请涉及无人驾驶,更具体地,涉及一种无人驾驶环卫车的实时路径规划方法及装置。
背景技术:
1、无人驾驶环卫车是一个包含环境感知、高精定位、路径规划、智能决策和运动控制等功能的智能驾驶系统,其有固定的作业区域和作业路线,作业时车速低,行为相对可控,在无人驾驶领域属于可率先实现的方向。
2、但相对于公开道路上的无人驾驶汽车,园区内的无人驾驶环卫车存在着不同的场景需求:
3、其一,环卫车需要执行清扫任务,能否沿着道路边沿作业关系到环卫车的作业质量。
4、其二,园区内障碍物多,尤其贴边作业时需要估计道路边沿的静态障碍物,使无人驾驶环卫车在作业时产生停顿,降低了避障作业的流畅性。
技术实现思路
1、本申请提供一种无人驾驶环卫车的实时路径规划方法及装置,设置了一条由历史数据确定的贴边路径,因此贴边路径的可靠性强,当车辆的感知模块无法检测到路沿时,可以沿贴边路径作业,起到了相对贴边的效果;当感知模块检测到路沿时,依据实际情况贴边作业,确保了环卫车的作业质量。
2、本申请提供了一种无人驾驶环卫车的实时路径规划方法,包括:
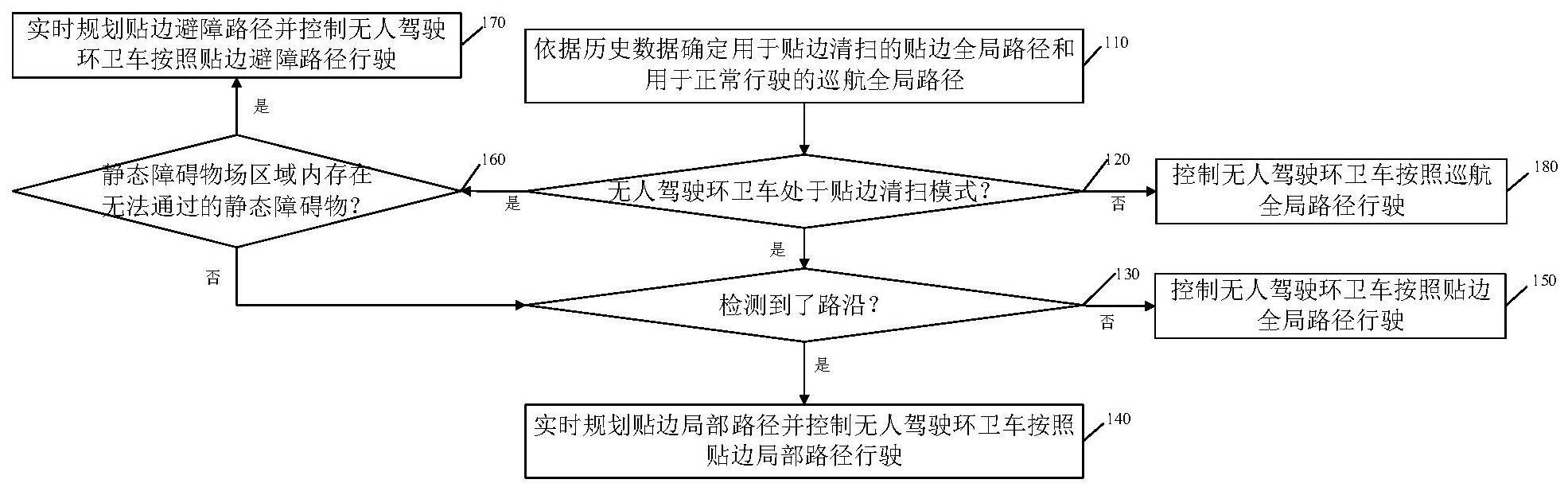
3、依据历史数据确定用于贴边清扫的贴边全局路径;
4、无人驾驶环卫车处于贴边清扫模式时,实时检测无人驾驶环卫车右侧道路的路沿,并判断是否检测到了路沿;
5、若是,则实时规划贴边局部路径并控制无人驾驶环卫车按照贴边局部路径行驶;否则,控制无人驾驶环卫车按照贴边全局路径行驶。
6、优选地,无人驾驶环卫车的实时路径规划方法还包括:
7、依据历史数据确定用于正常行驶的巡航全局路径;
8、无人驾驶环卫车处于贴边清扫模式时,实时检测覆盖贴边全局路径的静态障碍物场区域内是否存在无法通过的静态障碍物;
9、若是,则实时规划贴边避障路径并控制无人驾驶环卫车按照贴边避障路径行驶;
10、其中,贴边避障路径至少包括贴边全局路径与巡航全局路径之间的路径。
11、优选地,若静态障碍物不在巡航全局路径上,则依据无人驾驶环卫车的当前定位点、当前车速以及无人驾驶环卫车与静态障碍物之间的距离确定巡航全局路径上的第一目标点;
12、依据无人驾驶环卫车的当前定位点、当前车速以及第一目标点实时规划第一换道路径;
13、控制无人驾驶环卫车按照第一换道路径切换至巡航全局路径上,并在巡航全局路径上避开静态障碍物后返回贴边全局路径。
14、优选地,若静态障碍物在巡航全局路径上,则依据无人驾驶环卫车的当前定位点、当前车速、无人驾驶环卫车与静态障碍物之间的距离以及静态障碍物的左侧边界确定巡航全局路径上的第二目标点和静态障碍物左侧边界外的第三目标点;
15、规划第二换道路径,第二换道路径以当前定位点为起点,以第三目标点为终点,以第二目标点为经过点;
16、若第二换道路径可行,则控制无人驾驶环卫车按照第二换道路径行驶,并在避开静态障碍物后经巡航全局路径返回贴边全局路径。
17、优选地,若第二换道路径不可行,则控制无人驾驶环卫车减速,并依据无人驾驶环卫车的当前定位点、减速后的当前车速、无人驾驶环卫车与静态障碍物之间的距离以及静态障碍物的左侧边界重新规划路径,获得新的第二换道路径。
18、本申请还提供一种无人驾驶环卫车的实时路径规划装置,包括第一路径确定模块、第一判断模块、第一路径规划模块以及控制模块;
19、第一路径确定模块用于依据历史数据确定用于贴边清扫的贴边全局路径;
20、第一判断模块用于在无人驾驶环卫车处于贴边清扫模式时,实时检测无人驾驶环卫车右侧道路的路沿,并判断是否检测到了路沿;
21、第一路径规划模块用于在检测到路沿时实时规划贴边局部路径;
22、控制模块用于在检测到路沿时控制无人驾驶环卫车按照贴边局部路径行驶;或在未检测到路沿时控制无人驾驶环卫车按照贴边全局路径行驶。
23、优选地,无人驾驶环卫车的实时路径规划装置还包括第二路径确定模块、第二判断模块以及第二路径规划模块;
24、第二路径确定模块用于依据历史数据确定用于正常行驶的巡航全局路径;
25、第二判断模块用于在无人驾驶环卫车处于贴边清扫模式时,实时检测覆盖贴边全局路径的静态障碍物场区域内是否存在无法通过的静态障碍物;
26、第二路径规划模块用于在静态障碍物场区域内存在无法通过的静态障碍物时,实时规划贴边避障路径;
27、控制模块用于在静态障碍物场区域内存在无法通过的静态障碍物时,控制无人驾驶环卫车按照贴边避障路径行驶;
28、其中,贴边避障路径至少包括贴边全局路径与巡航全局路径之间的路径。
29、优选地,第二路径规划模块包括第一目标点确定模块和第一换道路径规划模块;
30、第一目标点确定模块用于在静态障碍物不在巡航全局路径上时,依据无人驾驶环卫车的当前定位点、当前车速以及无人驾驶环卫车与静态障碍物之间的距离确定巡航全局路径上的第一目标点;
31、第一换道路径规划模块用于依据无人驾驶环卫车的当前定位点、当前车速以及第一目标点实时规划第一换道路径;
32、并且,控制模块用于控制无人驾驶环卫车按照第一换道路径切换至巡航全局路径上,并在巡航全局路径上避开静态障碍物后返回贴边全局路径。
33、优选地,第二路径规划模块包括第二目标点确定模块和第二换道路径规划模块;
34、第二目标点确定模块用于在静态障碍物在巡航全局路径上,依据无人驾驶环卫车的当前定位点、当前车速、无人驾驶环卫车与静态障碍物之间的距离以及静态障碍物的左侧边界确定巡航全局路径上的第二目标点和静态障碍物左侧边界外的第三目标点;
35、第二换道路径规划模块用于规划第二换道路径,第二换道路径以当前定位点为起点,以第三目标点为终点,以第二目标点为经过点;
36、控制模块用于在第二换道路径可行时,控制无人驾驶环卫车按照第二换道路径行驶,并在避开静态障碍物后返回贴边全局路径。
37、优选地,控制模块还用于在第二换道路径不可行时,控制无人驾驶环卫车减速。
38、通过以下参照附图对本申请的示例性实施例的详细描述,本申请的其它特征及其优点将会变得清楚。
技术特征:
1.一种无人驾驶环卫车的实时路径规划方法,其特征在于,包括:
2.根据权利要求1所述的无人驾驶环卫车的实时路径规划方法,其特征在于,还包括:
3.根据权利要求2所述的无人驾驶环卫车的实时路径规划方法,其特征在于,若所述静态障碍物不在所述巡航全局路径上,则依据无人驾驶环卫车的当前定位点、当前车速以及无人驾驶环卫车与所述静态障碍物之间的距离确定所述巡航全局路径上的第一目标点;
4.根据权利要求2所述的无人驾驶环卫车的实时路径规划方法,其特征在于,若所述静态障碍物在所述巡航全局路径上,则依据无人驾驶环卫车的当前定位点、当前车速、无人驾驶环卫车与所述静态障碍物之间的距离以及所述静态障碍物的左侧边界确定所述巡航全局路径上的第二目标点和所述静态障碍物左侧边界外的第三目标点;
5.根据权利要求4所述的无人驾驶环卫车的实时路径规划方法,其特征在于,若所述第二换道路径不可行,则控制无人驾驶环卫车减速,并依据无人驾驶环卫车的当前定位点、减速后的当前车速、无人驾驶环卫车与所述静态障碍物之间的距离以及所述静态障碍物的左侧边界重新规划路径,获得新的第二换道路径。
6.一种无人驾驶环卫车的实时路径规划装置,其特征在于,包括第一路径确定模块、第一判断模块、第一路径规划模块以及控制模块;
7.根据权利要求6所述的无人驾驶环卫车的实时路径规划装置,其特征在于,还包括第二路径确定模块、第二判断模块以及第二路径规划模块;
8.根据权利要求7所述的无人驾驶环卫车的实时路径规划装置,其特征在于,所述第二路径规划模块包括第一目标点确定模块和第一换道路径规划模块;
9.根据权利要求7所述的无人驾驶环卫车的实时路径规划装置,其特征在于,所述第二路径规划模块包括第二目标点确定模块和第二换道路径规划模块;
10.根据权利要求9所述的无人驾驶环卫车的实时路径规划装置,其特征在于,所述控制模块还用于在所述第二换道路径不可行时,控制无人驾驶环卫车减速。
技术总结
本申请公开了一种无人驾驶环卫车的实时路径规划方法及装置,方法包括:依据历史数据确定用于贴边清扫的贴边全局路径;无人驾驶环卫车处于贴边清扫模式时,实时检测无人驾驶环卫车右侧道路的路沿,并判断是否检测到了路沿;若是,则实时规划贴边局部路径并控制无人驾驶环卫车按照贴边局部路径行驶;否则,控制无人驾驶环卫车按照贴边全局路径行驶。本申请设置了一条由历史数据确定的贴边路径,因此贴边路径的可靠性强,当车辆的感知模块无法检测到路沿时,可以沿贴边路径作业,起到了相对贴边的效果;当感知模块检测到路沿时,依据实际情况贴边作业,确保了环卫车的作业质量。
技术研发人员:张安平,吴琼,丁钊,李涛,何梦颖
受保护的技术使用者:安徽江淮汽车集团股份有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!