一种基于智能识别的高空作业车作业安全控制系统的制作方法
本发明涉及安全控制,更具体地说,本发明涉及一种基于智能识别的高空作业车作业安全控制系统。
背景技术:
1、随着科技的发展,相对于传统的脚手架式高空作业,高空作业车凭借其极高的安全性、环境适应性和作业效率,逐渐成为现在主流的高空作业方式。
2、传统的脚手架式高空作业需要通过搭建脚手架结构来支撑工作人员和设备进行作业。这种方式存在一些潜在的风险,例如结构不稳定、搭建时间长、操作不便等问题,极大地限制了高空作业的效率和安全性。
3、相比之下,高空作业车则为工作人员提供了更安全、稳定的工作平台,无需依赖复杂的搭建结构。高空作业车是一种专门用于在高空环境中进行各种作业的机械设备。它通常具有伸缩臂或工作平台,可以将工作人员和设备提升到较高的高度,以便进行建筑、维修、安装、清洁和其他高空作业任务它具备灵活的伸缩臂或工作平台,可以将工作人员和设备快速、精确地提升到所需的高度,适应不同的工作环境和任务需求。
4、但是其在实际使用时,仍旧存在一些缺点,如传统的高空作业车操作主要依赖于驾驶员肉眼的观察对高空作业车进行指挥,存在一定的局限性和风险,也无法进行智能避障和准确地判断作业时遇到的故障,因此,一种基于智能识别的高空作业车作业安全控制系统应运而生。
技术实现思路
1、为了克服现有技术的上述缺陷,本发明的实施例提供一种基于智能识别的高空作业车作业安全控制系统,以解决上述背景技术中提出的问题。
2、为实现上述目的,本发明提供如下技术方案:
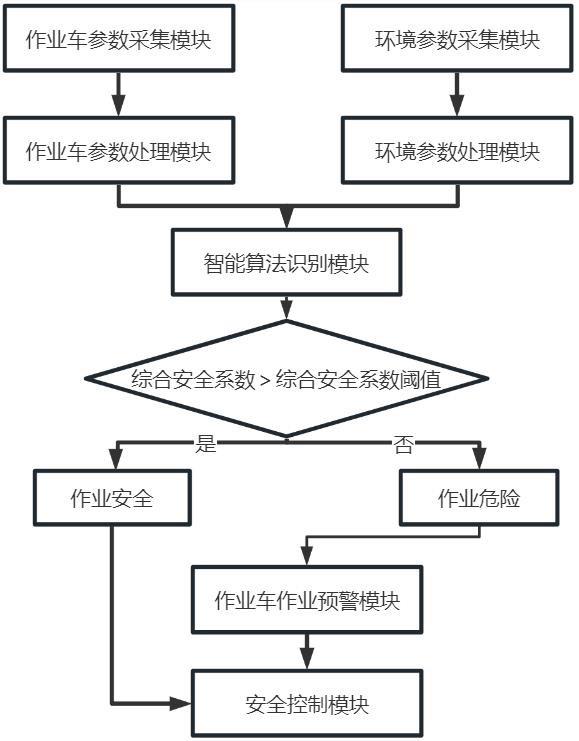
3、作业车参数采集模块:用于采集高空作业车作业时的作业车载荷重量、倾斜角度和旋转角度,并将作业车参数传输至作业车参数处理模块;
4、作业车参数处理模块:用于接收来自作业车参数收集模块中采集的参数,并对参数中进行有效提取,进行计算得出位姿特征值;
5、环境参数采集模块:用于采集高空作业车在作业时的风速、天气、温度和湿度,并将环境参数传输至环境参数处理模块;
6、环境参数处理模块:用于接收来自环境参数采集模块采集的环境参数,并对参数进行处理,进行计算得出环境影响值;
7、智能算法识别模块:用于将计算得出的位姿特征值和环境影响值进行分析,并将数据导入到智能算法识别模型中,计算得出综合安全系数,并识别作业时作业车周围的障碍物和安全区域,最后将综合安全系数传输至作业预警模块;
8、作业车作业预警模块:用于将分析计算出的综合安全系数与预设的综合安全系数阈值,进行对比,根据不同的输出指令判断当前作业车作业时是否安全;
9、安全控制模块:用于根据作业预警模块中输出的不同指令反馈给设备操作人员。
10、优选的,所述作业车参数采集模块中采集载荷重量的方法为:
11、通过将弯曲传感器安装在作业车结构内,然后将弯曲传感器连接到数据采
12、集设备,实时记录作业车载荷的变化并保存数据;
13、所述作业车参数采集模块中采集倾斜度的方法为:
14、通过将陀螺仪安装在作业车结构顶部,然后将陀螺仪连接到数据采集设备,通过陀螺仪输出的数据,读取作业车的倾斜角度,实时记录作业车倾斜角度的变化并保存。
15、所述作业车参数采集模块中采集旋转角度的方法为:
16、通过将磁力计安装在作业车的旋转部位上,通过测量地磁场的变化来确定旋转角度,然后将磁力计连接到数据采集设备,实时记录作业车旋转角度的变化并保存。
17、优选的,所述作业参数处理模块中,对采集到的数据进行预处理,提取有效数据,去除异常值,异常值的判定为各传感器的数值与历史传感器中采集到的数值相差大于n,并且采集到的数值大于预设的异常阈值,将去除异常值的数据填充缺失值,缺失值取数据的中位数,防止出现较大偏差。
18、所述作业参数处理模块中位姿特征值的计算方法具体为:
19、,其中,z表示为位姿特征值,g表示为载荷重量,θ表示为倾斜角度,μ表示为旋转角度,ɑ1和ɑ2表示为权重因子。
20、优选的,所述环境参数采集模块中,采集风速的方法为;
21、通过光学干涉测量的方法对风速进行采集,其中测量的步骤具体为:
22、a1:准备一个激光光源,可以是激光器或激光二极管。将光源朝向待测区域,确保能够照射到气流中;再准备一个密涅瓦干涉仪;
23、a2:通过光学元件将激光光束分为两束。其中一束照射到固定的参考面或反射体上,另一束照射到待测的气流中;
24、a3:将来自参考面和气流的反射光束重新相交,观察干涉条纹的变化。
25、a4:利用干涉条纹的移动或变形情况,可以推断出风速的大小。通过对干涉条纹的形态、位移、强度等参数进行测量和分析,可以得到风速的相关数据。
26、所述环境参数采集模块中,采集温度的方法为:
27、使用热像仪成像的方法测量物体温度,通过红外线感应器来测量物体的热辐射,然后将其转换为可见图像,根据图像检测温度分布和热量流动的差异。
28、所述环境参数模块中,采集湿度的方法为:
29、通过远程传感器获得,传感器通过遥感技术从高空获取湿度数据。它通无人机等高空设备,通过遥感仪器实时监测大气中的湿度情况。
30、优选的,所述环境参数处理模块中,将采集到的数据进行从大到小排序,取每个参数数据的中位值进行计算,减小误差,其中,环境影响值的计算方法具体为:
31、,其中y为环境影响值,f为测量的风速值,t为测量的温度,s为测量的湿度值,η为天气指数,当天气为晴天时取3,当天气为阴天时取2,其他天气时均取1。
32、优选的,所述智能算法识别模块中,综合安全系数的算法具体为:
33、,其中q为综合安全系数,z为位姿特征值,y为环境影响值,λ1和λ2为权重因子,ω为其他影响因子。
34、优选的,所述作业车作业预警模块中,接收来自智能算法识别模块中的计算出的综合安全系数,将计算出的综合安全系数与预设的综合安全系数阈值进行对比;若计算出的综合安全系数大于预设的综合安全系数阈值,则输出作业安全指令;若计算出的综合安全系数小于预设的综合安全系数阈值,则输出作业危险指令,进行预警。
35、优选的,所述安全控制模块中,接收来自作业车作业预警模块中输出的不同指令;若输入指令为作业安全指令,则作业车可以继续作业;若输入指令为作业危险指令,则作业车立即停止作业,并将指令发送给设备操作人员,及时进行修正。
36、本发明的技术效果和优点:
37、通过获取作业车载荷重量、倾斜角度、旋转角度以及环境参数,根据数据计算得出综合安全系数,通过获取的综合安全系数判断当前工作环境是否安全,提前发现安全隐患提高作业时的安全性,减少在工作时人为带来的有误操作和判断。
技术特征:
1.一种基于智能识别的高空作业车作业安全控制系统,其特征在于:
2.根据权利要求1所述的一种基于智能识别的高空作业车作业安全控制系统,其特征在于:所述作业车参数采集模块中采集载荷重量的方法为:
3.根据权利要求1所述的一种基于智能识别的高空作业车作业安全控制系统,其特征在于:所述作业参数处理模块中,对采集到的数据进行预处理,提取有效数据,去除异常值,异常值的判定为各传感器的数值与历史传感器中采集到的数值相差大于n,并且采集到的数值大于预设的异常阈值,将去除异常值的数据填充缺失值,缺失值取数据的中位数,防止出现较大偏差;
4.根据权利要求1所述的一种基于智能识别的高空作业车作业安全控制系统,其特征在于:所述环境参数采集模块中,采集风速的方法为;
5.根据权利要求1所述的一种基于智能识别的高空作业车作业安全控制系统,其特征在于:所述环境参数处理模块中,将采集到的数据进行从大到小排序,取每个参数数据的中位值进行计算,减小误差,其中,环境影响值的计算方法具体为:
6.根据权利要求1所述的一种基于智能识别的高空作业车作业安全控制系统,其特征在于:所述智能算法识别模块中,综合安全系数的算法具体为:
7.根据权利要求1所述的一种基于智能识别的高空作业车作业安全控制系统,其特征在于:所述作业车作业预警模块中,接收来自智能算法识别模块中的计算出的综合安全系数,将计算出的综合安全系数与预设的综合安全系数阈值进行对比;若计算出的综合安全系数大于预设的综合安全系数阈值,则输出作业安全指令;若计算出的综合安全系数小于预设的综合安全系数阈值,则输出作业危险指令,进行预警。
8.根据权利要求1所述的一种基于智能识别的高空作业车作业安全控制系统,其特征在于:所述安全控制模块中,接收来自作业车作业预警模块中输出的不同指令;若输入指令为作业安全指令,则作业车可以继续作业;若输入指令为作业危险指令,则作业车立即停止作业,并将指令发送给设备操作人员,及时进行修正。
技术总结
本发明公开了一种基于智能识别的高空作业车作业安全控制系统,具体涉及安全控制领域,包括作业车参数采集模块、作业车参数处理模块、环境参数采集模块、环境参数处理模块、智能算法识别模块、作业车作业预警模块、安全控制模块。本发明通过采集作业车的载荷重量、倾斜角度和旋转角度,以及环境参数如风速、天气、温度和湿度,对这些参数进行处理并计算出位姿特征值和环境影响值,并将其导入智能算法识别模型中计算出综合安全系数;将计算出的综合安全系数与预设的综合安全系数进行对比,输出指令。最后,根据作业预警模块的输出指令反馈给设备操作人员,以确保作业车作业人员的安全。
技术研发人员:李朋,李佳,孔超,胡庄伟,张忠远,张欢
受保护的技术使用者:山东北骏重工有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!